TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025177963
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024085140
出願日
2024-05-24
発明の名称
ロボット制御装置、ロボット制御システム、ロボット、及びロボット制御方法
出願人
株式会社日立製作所
代理人
弁理士法人磯野国際特許商標事務所
主分類
B25J
13/00 20060101AFI20251128BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットと相方とで協働作業を行うシーンにおいて、作業継続が困難な状況にロボットが陥った場合でも、全体としての作業効率の低下を抑制する。
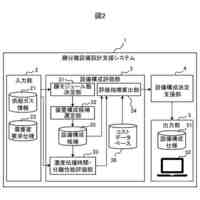
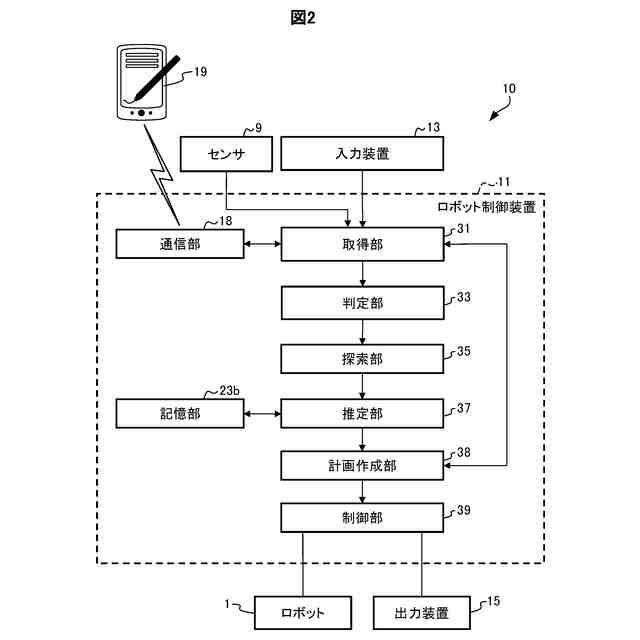
【解決手段】ロボット制御装置11は、作業指示に従う第1作業の進捗状況を判定する判定部33、第1作業の進捗状況が継続否である場合、第1作業の進捗状況を継続可にするための特定情報を提供可能な相方17を探索する探索部35、第1作業の進捗状況を継続否から継続可にするための第2作業を含む総作業コストを推定する推定部37、該推定された総作業コストに基づいて、相方17に対する第2作業を含む作業計画を作成する計画作成部38、及び、該作成された作業計画に従う第2作業を含む作業を行わせる制御部39を備える。計画作成部38は、総作業コストが最小となるように作業計画を作成する。
【選択図】 図2
特許請求の範囲
【請求項1】
所定の作業指示に従う作業をロボットに行わせるロボット制御装置であって、
前記作業指示を取得する取得部と、
前記作業指示に従う第1作業の進捗状況を判定する判定部と、
前記判定部による判定の結果、前記第1作業の進捗状況が継続否である場合、当該第1作業の進捗状況を継続可にするための特定情報を提供可能な相方を探索する探索部と、
前記探索部による探索の結果、前記相方が抽出された場合、当該第1作業の進捗状況を継続否から継続可にするための第2作業を含む総作業コストを推定する推定部と、
前記推定部により推定された前記総作業コストに基づいて、当該相方に対する前記第2作業を含む作業計画を作成する計画作成部と、
前記計画作成部により作成された前記作業計画に従う前記第2作業を含む作業を行わせる制御部と、を備え、
前記計画作成部は、前記総作業コストが最小となるように前記作業計画を作成する
ことを特徴とするロボット制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のロボット制御装置であって、
前記推定部は、前記総作業コストを、当該ロボットの作業待機に係る作業コストと、当該相方の作業負荷に係る作業コストと、に基づいて推定する
ことを特徴とするロボット制御装置。
【請求項3】
請求項2に記載のロボット制御装置であって、
前記取得部は、前記特定情報をさらに取得し、
前記計画作成部は、前記取得した前記特定情報に基づく作業及び前記第1作業を含む作業を行うための作業計画を再作成する
ことを特徴とするロボット制御装置。
【請求項4】
請求項3に記載のロボット制御装置であって、
前記判定部は、前記再作成された作業計画に従う前記第1作業の進捗状況を再判定する
ことを特徴とするロボット制御装置。
【請求項5】
請求項4に記載のロボット制御装置であって、
前記判定部による前記第1作業の進捗状況に係る再判定の結果、当該第1作業の進捗状況が継続否である場合、前記計画作成部は、前記特定情報を提供可能な相方であって前記相方とは異なる別の相方を前記探索部に再探索させる作業を含む作業計画を再作成する
ことを特徴とするロボット制御装置。
【請求項6】
請求項2に記載のロボット制御装置であって、
前記相方の作業内容毎に、対応する作業コストをそれぞれ関連付けた作業コスト情報を記憶する記憶部をさらに備え、
前記推定部は、前記相方の作業内容を取得すると共に、当該取得した当該相方の作業内容及び前記作業コスト情報に基づいて、当該相方の作業負荷に係る作業コストを推定する
ことを特徴とするロボット制御装置。
【請求項7】
請求項6に記載のロボット制御装置であって、
前記作業コスト情報は、前記相方の作業内容毎に、対応する作業コストの確率分布をそれぞれ関連付けた情報である
ことを特徴とするロボット制御装置。
【請求項8】
請求項6に記載のロボット制御装置であって、
前記作業コスト情報は、前記相方の属性毎に、対応する作業コストを関連付けた情報である
ことを特徴とするロボット制御装置。
【請求項9】
請求項6に記載のロボット制御装置であって、
前記作業コスト情報は、前記相方のスケジュール情報を含む情報である
ことを特徴とするロボット制御装置。
【請求項10】
請求項9に記載のロボット制御装置であって、
前記推定部は、前記相方のスケジュール情報を含む前記作業コスト情報に基づいて、当該相方が作業を遂行中か否かを推定すると共に、当該相方が作業を遂行中か否かに基づいて、当該相方の作業負荷に係る作業コストを推定する
ことを特徴とするロボット制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットの動作を制御するロボット制御装置、ロボット制御システム、ロボット、及びロボット制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年の製造・物流・サービス・施工・設備保守等の分野では、ロボットを用いた作業の自動化、ロボットと人との協働作業に関する需要が高まっている。この種のロボットでは、例えば、作業継続が困難な状況に陥った場合、迅速な作業復帰が求められる。
ロボットが迅速に作業復帰するため、特許文献1に記載の技術がある。この公報には、「複数の教示者の情報を記憶する教示者記憶部と、ロボットに作業を継続させるためにサポート情報が必要である場合に、教示者記憶部が記憶する複数の教示者のいずれかを選択する選択部と、前記選択部が選択した教示者に、ネットワーク回線を介して前記ロボットの環境情報を送信する環境情報送信部と、前記選択部が選択した教示者からネットワーク回線を介して前記サポート情報を受信するサポート情報受信部と、を備えるロボット制御システム」という記載がある。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/149414号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、例えば、ロボットと相方(人、他のロボットなど)とで協働作業を行うシーンでは、作業継続が困難な状況にロボットが陥った場合において、協働して作業中の相方は当該ロボットとは別の作業に専念しているケースが想定される。こうしたケースでは、作業に専念している相方に対話等のサポートを求めると、その相方の作業を中断させてしまう。結果として、作業効率を損なうことが懸念される。
すなわち、特許文献1のロボット制御システムでは、ロボットと相方とで協働作業を行うシーンにおいて、作業継続が困難な状況にロボットが陥った場合の対処法に関し、相方の事情に配慮することは記載も示唆もされていない。その結果、全体の作業効率が低下するおそれがあった。
【0005】
本発明は、前記実情に鑑みてなされたものであり、ロボットと相方とで協働作業を行うシーンにおいて、作業継続が困難な状況にロボットが陥った場合であっても、全体としての作業効率の低下を抑制することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を解決するために、本発明に係るロボット制御装置は、
所定の作業指示に従う作業をロボットに行わせるロボット制御装置であって、
前記作業指示を取得する取得部と、
前記作業指示に従う第1作業の進捗状況を判定する判定部と、
前記判定部による判定の結果、前記第1作業の進捗状況が継続否である場合、当該第1作業の進捗状況を継続可にするための特定情報を提供可能な相方を探索する探索部と、
前記探索部による探索の結果、前記相方が抽出された場合、当該第1作業の進捗状況を継続否から継続可にするための第2作業を含む総作業コストを推定する推定部と、
前記推定部により推定された前記総作業コストに基づいて、当該相方に対する前記第2作業を含む作業計画を作成する計画作成部と、
前記計画作成部により作成された前記作業計画に従う前記第2作業を含む作業を行わせる制御部と、を備え、
前記計画作成部は、前記総作業コストが最小となるように前記作業計画を作成することを最も主要な特徴とする。
【発明の効果】
【0007】
本発明によれば、ロボットと相方とで協働作業を行うシーンにおいて、作業継続が困難な状況にロボットが陥った場合であっても、全体としての作業効率の低下を抑制することができる。
上記以外の課題、構成及び効果について、以下の実施形態において詳細に説明する。
【図面の簡単な説明】
【0008】
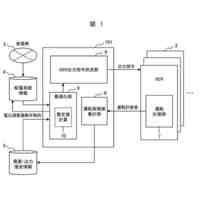
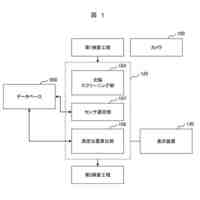
本発明の実施形態に係るロボット制御装置を含むロボット制御システムの概略構成図である。
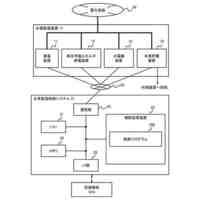
本発明の実施形態に係るロボット制御装置の機能ブロック図である。
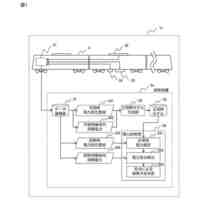
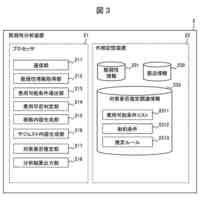
本発明の実施形態に係るロボット制御装置のハードウェア構成を例示的に示すブロック図である。
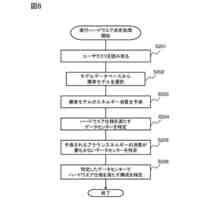
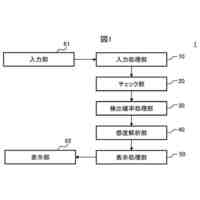
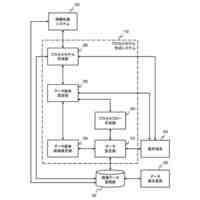
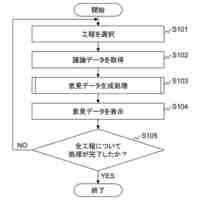
本発明の実施形態に係るロボット制御装置の動作手順を表すフローチャートである。
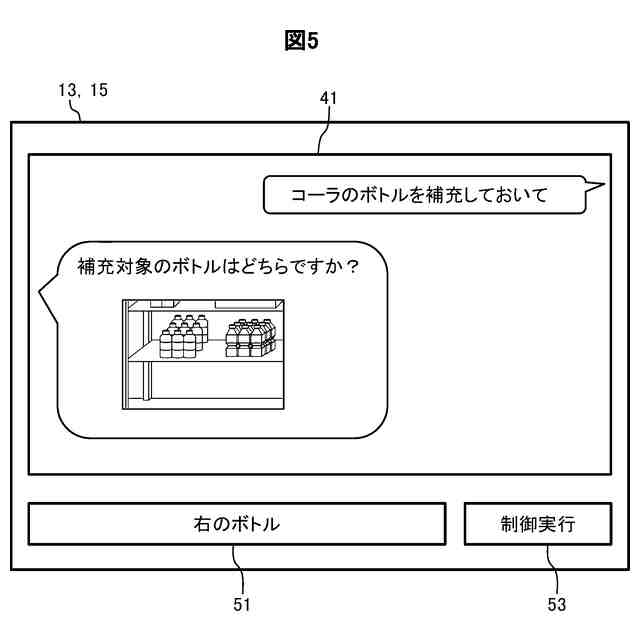
作業指示に従う第1作業の進捗状況を継続可にするために役立つ特定情報の表示画面を例示的に示す説明図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態に係るロボット制御装置、ロボット制御システム、ロボット、及びロボット制御方法について、適宜の図面を参照しながら説明する。
本発明の実施形態に係るロボット制御装置の説明において、共通の機能を有する構成要素には共通の符号を付し、その重複した説明を省略する。
【0010】
〔ロボット制御システム10の概略構成〕
はじめに、本発明の実施形態に係るロボット制御装置11を含むロボット制御システム10の概略構成について、図1を参照して説明する。
図1は、本発明の実施形態に係るロボット制御装置11を含むロボット制御システム10の概略構成図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
冷却構造
4日前
株式会社日立製作所
演算装置
10日前
株式会社日立製作所
軌条車両
4日前
株式会社日立製作所
回転電機
10日前
株式会社日立製作所
電力変換装置
5日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
環境負荷算出装置
3日前
株式会社日立製作所
電力変換システム
18日前
株式会社日立製作所
分散電源管理システム
5日前
株式会社日立製作所
診断装置及び診断方法
3日前
株式会社日立製作所
情報提示装置及び方法
3日前
株式会社日立製作所
施設管理装置および方法
18日前
株式会社日立製作所
実行ハードウエア決定方法
3日前
株式会社日立製作所
モータ、及びロータ固定構造
10日前
株式会社日立製作所
検証システムおよび検証方法
10日前
株式会社日立製作所
IT運用管理装置および方法
11日前
株式会社日立製作所
膜分離設備設計支援システム
18日前
株式会社日立製作所
宇宙機、地上局及びアンテナ
18日前
株式会社日立製作所
鉄道車両の排障器及び鉄道車両
5日前
株式会社日立製作所
設計支援装置及び設計支援方法
10日前
株式会社日立製作所
広告支援装置および広告支援方法
11日前
株式会社日立製作所
水素製造制御システムおよび方法
12日前
株式会社日立製作所
スカートモール及び乗客コンベア
18日前
株式会社日立製作所
ガス分離システムの劣化診断装置
18日前
株式会社日立製作所
脆弱性分析装置、脆弱性分析方法
3日前
株式会社日立製作所
情報処理システム及び情報処理方法
10日前
株式会社日立製作所
量子デバイス及び量子情報処理装置
3日前
株式会社日立製作所
異常診断装置及び異常診断システム
10日前
株式会社日立製作所
位置推定システム及び位置推定方法
4日前
株式会社日立製作所
テスト支援装置及びテスト支援方法
18日前
株式会社日立製作所
対話支援システム、及び対話支援方法
11日前
株式会社日立製作所
材料提案システムおよび材料提案装置
3日前
株式会社日立製作所
自律走行車両管理システムおよび方法
10日前
株式会社日立製作所
欠陥検査システム、及び欠陥検査方法
18日前
株式会社日立製作所
計算機システム及び構想策定の支援方法
18日前
株式会社日立製作所
電力変換装置、電力変換装置の製造方法
5日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ