TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025173201
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078675
出願日
2024-05-14
発明の名称
地図生成システム、情報処理装置および地図生成方法
出願人
株式会社日立製作所
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G01C
21/26 20060101AFI20251119BHJP(測定;試験)
要約
【課題】移動体が走行する軌道が周辺環境センサの検知範囲内に存在しない場合や、軌道が周辺環境センサの検知範囲内に存在するが検知が困難である場合等であっても、該軌道の形状に関する軌道データを含む環境地図を生成する。
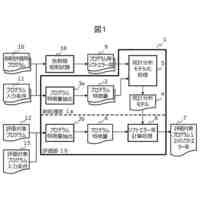
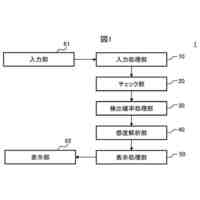
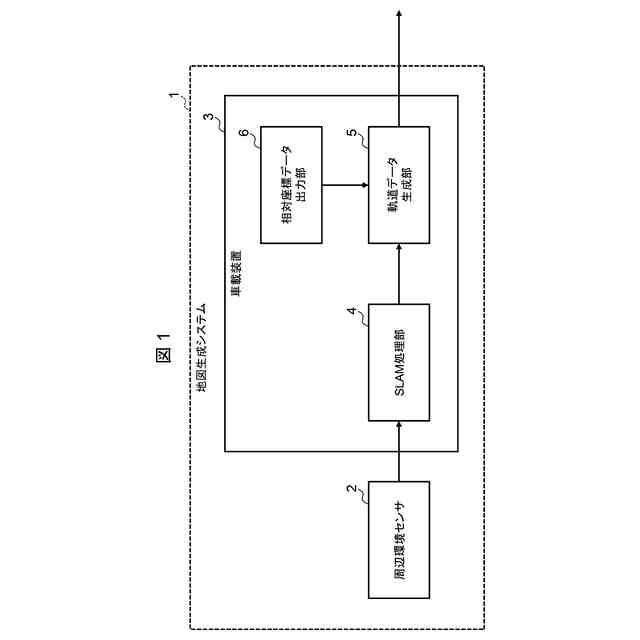
【解決手段】周辺環境センサ2のデータに基づいて、軌道の周辺の環境を表す環境地図と、周辺環境センサ2の位置および/または姿勢であるセンサポーズとを推定するSLAM処理部4と、周辺環境センサ2の位置を表す周辺環境センサ座標と、移動体の構成部品の位置を基準に定義される基準座標との間の相対座標を出力する相対座標データ出力部6と、相対座標データ出力部により出力された相対座標と、環境地図上に表示される軌道の形状を表す軌道データを生成する軌道データ生成部5とを有する。軌道データ生成部5は、環境地図上に表示される基準座標の軌跡を計算し、算出された軌跡に基づいて軌道データを生成する。
【選択図】図1
特許請求の範囲
【請求項1】
移動体が走行する軌道の形状に関する軌道データを含む環境地図を生成する地図生成システムであって、
当該移動体に搭載され、自装置の周辺の環境情報を取得可能な周辺環境センサと、
前記周辺環境センサとデータ通信可能に接続され、プロセッサと記憶装置とを少なくとも有するコンピュータと
を少なくとも備え、
前記コンピュータは、
前記周辺環境センサにより取得されたセンサデータに基づいて、前記軌道の周辺の環境を表す環境地図と、当該環境地図上に表示される前記周辺環境センサの位置および/または姿勢であるセンサポーズとを推定するSLAM処理部と、
前記周辺環境センサの位置を表す周辺環境センサ座標と、前記移動体の構成部品の位置を基準に定義される基準座標との間の相対座標を出力する相対座標データ出力部と、
前記相対座標データ出力部により出力された相対座標と、前記SLAM処理部の出力とに基づいて、前記環境地図上に表示される前記軌道の形状を表す軌道データを生成する軌道データ生成部と
を有し、
前記軌道データ生成部は、前記環境地図上に表示される前記基準座標の軌跡を計算し、前記算出された軌跡に基づいて軌道データを生成する、
地図生成システム。
続きを表示(約 1,400 文字)
【請求項2】
前記周辺環境センサは、周辺物体の形状および/または性状に応じたデータを出力する少なくとも一つ以上のセンサである、請求項1に記載の地図生成システム。
【請求項3】
前記周辺環境センサは、LiDAR(Light Detection And Ranging)、カメラ、レーザーの、少なくともいずれか一つである、請求項2に記載の地図生成システム。
【請求項4】
前記周辺環境センサは、GNSS(Global Navigation Satellite System)受信機またはビーコン受信機の少なくともいずれか一つである、請求項1に記載の地図生成システム。
【請求項5】
前記軌道データ生成部は、前記基準座標の前記環境地図上でのポーズ履歴を算出し、これらに対して平滑化処理を行うことで、軌道データを生成する、請求項1に記載の地図生成システム。
【請求項6】
前記基準座標は、前記周辺環境センサに対する相対位置が変動しうる前記移動体上の構成部品である可動構成部品を基準に定義され、
前記相対座標データ出力部は、前記周辺環境センサ座標と前記基準座標の間の相対座標を出力する、
請求項1に記載の地図生成システム。
【請求項7】
前記相対座標データ出力部は、前記移動体に存在する可動部についてその変位量を計測するセンサを有し、当該センサの出力をもとに、前記周辺環境センサ座標と前記基準座標の相対座標を出力する、請求項6に記載の地図生成システム。
【請求項8】
前記相対座標データ出力部は、前記周辺環境センサより得られたデータを用いて軌道または軌道周辺の構造物を検知し、当該検知結果を用いて、前記周辺環境センサ座標と前記基準座標の間の相対座標を出力する、請求項6に記載の地図生成システム。
【請求項9】
前記SLAM処理部は、地図の生成を行う地点に関する情報である事前地図データを保持する、請求項1に記載の地図生成システム。
【請求項10】
移動体が走行する軌道の形状に関する軌道データを含む環境地図を生成する地図生成システムを構成する情報処理装置であって、
当該移動体に搭載され、自装置の周辺の環境情報を取得可能な周辺環境センサとデータ通信可能に接続され、プロセッサと記憶装置とを少なくとも有するコンピュータを少なくとも含んで構成され、
前記コンピュータは、
前記周辺環境センサにより取得されたセンサデータに基づいて、前記軌道の周辺の環境を表す環境地図と、当該環境地図上に表示される前記周辺環境センサの位置および/または姿勢であるセンサポーズとを推定するSLAM処理部と、
前記周辺環境センサの位置を表す周辺環境センサ座標と、前記移動体の構成部品の位置を基準に定義される基準座標との間の相対座標を出力する相対座標データ出力部と、
前記相対座標データ出力部により出力された相対座標と、前記SLAM処理部の出力とに基づいて、前記環境地図上に表示される前記軌道の形状を表す軌道データを生成する軌道データ生成部と
を有し、
前記軌道データ生成部は、前記環境地図上に表示される前記基準座標の軌跡を計算し、前記算出された軌跡に基づいて軌道データを生成する、
情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、定められた軌道上を移動体が走行する軌道輸送システムにおいて、移動体の走行路である軌道に係る情報を含む、地図を生成する技術に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
例えば鉄道やモノレールのような、予め定められた軌道上を輸送用車両(以下、単に「車両」とも称する)が走行する軌道輸送システムでは、車両の走行路である軌道上やその付近に、不意に人や動物、他の移動体、倒木、落石等の各種障害物が存在していた場合、走行中の車両は、操舵によって障害物を回避することができず、専ら減速または停止することで障害物との衝突を未然に防ぐ必要がある。そのため、軌道上やその付近に存在する障害物を検知することは、軌道輸送システムの安全性や運用上の効率性を十分なものとするうえで、極めて重要である。
【0003】
この軌道上やその付近に存在する障害物を検知する主な手法の一つとして、走行中の車両において、常時、進行方向すなわち前方を監視することが挙げられる。こうした前方監視は、有人運転が主流であった従来は、専ら運転士の目視によって行われてきたが、昨今では、より安全で、かつ効率的に列車を運行するために、車両に搭載されたカメラやLiDAR(Light Detection And Ranging)等の各種センサ(以下、「周辺環境センサ」と総称する場合がある)を用いて前方監視を行ったり、これらのセンサを用いて軌道上の障害物を検知したりするために用いられる、さまざまな技術が提案されている(例えば特許文献1~3)。
【先行技術文献】
【特許文献】
【0004】
特開2019-023017号公報
特許第7216699号公報
特許第7412665号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ただし、専ら周辺環境センサで障害物を検知するのみでは、前方の軌道上およびその付近のみならず、その他の範囲に存在する障害物も検知してしまうことが考えられる。この時、前方の軌道上およびその付近に存在する障害物と、それ以外の領域に存在する障害物とが区別できない場合、例えば軌道沿線に存在する一般道を歩く人物を周辺環境センサが検知して、車両がみだりに減速または停止してしまうこととなるため、例えば軌道の形状を認識して、当該形状を元に軌道上およびその付近に存在する障害物のみを検知することが考えられる。
【0006】
車両前方の軌道の形状を認識する方法としては、例えば特許文献1に記載されているように、カメラ等の周辺環境センサのデータを用いて、当該データ中に含まれる軌道の形状を認識する手法が存在する。しかしながら、当該手法では、軌道が周辺環境センサの検知範囲内に存在し、かつ軌道が検知可能であることが必要である。すなわち、例えばカメラによる認識を行う場合においては、丘を越えた先に障害物が存在するために障害物周辺の軌道が死角となる場合や、夜間や濃霧によって軌道の認識が困難な場合に、障害物は認識可能であっても、その周辺の軌道形状は認識できないという事象が発生する。
【0007】
その他の車両前方の軌道の形状を認識する方法としては、例えば事前に軌道形状を含む地図データを作成しておき、走行中には当該地図上での位置・姿勢を推定することで、車両前方の軌道の形状を求める手法が考えられる。当該手法によれば、車両前方の軌道が周辺環境センサでは認識不可能な場合であっても、軌道の形状を認識することが可能である。ただし、当該手法を用いる場合には、事前に軌道形状を含む地図データを作成することが必要である。
【0008】
軌道形状を含む地図データを作成する手法としては、例えば特許文献2における車線推定のように、走行中の車両において、地図上での現在の車両の位置・姿勢を推定するとともに、その際に周辺環境センサを用いて、当該センサデータ中の軌道形状を認識することで、地図上に軌道データを付与していく手法が考えられる。しかしながら、本手法は、特許文献1同様に周辺環境センサの出力結果から軌道形状を認識することが必要であり、軌道が周辺環境センサの死角に存在したり、軌道の認識に失敗したりした場合、軌道データが欠落してしまうリスクが依然存在する。
【0009】
本発明は、上記課題を鑑みてなされたものであり、移動体が走行する軌道が周辺環境センサの検知範囲内に存在しない場合や、当該軌道が周辺環境センサの検知範囲内に存在するが検知が困難である場合等であっても、当該軌道の形状に関する軌道データを含む環境地図を生成することが可能な技術の提供を目的とする。
【課題を解決するための手段】
【0010】
本発明による地図生成システムは、移動体が走行する軌道の形状に関する軌道データを含む環境地図を生成するシステムであって、当該移動体に搭載され、自装置の周辺の環境情報を取得可能な周辺環境センサと、周辺環境センサとデータ通信可能に接続され、プロセッサと記憶装置とを少なくとも有するコンピュータとを少なくとも備える。コンピュータは、周辺環境センサにより取得されたセンサデータに基づいて、軌道の周辺の環境を表す環境地図と、当該環境地図上に表示される周辺環境センサの位置および/または姿勢であるセンサポーズとを推定するSLAM処理部と、周辺環境センサの位置を表す周辺環境センサ座標と、移動体の構成部品の位置を基準に定義される基準座標との間の相対座標を出力する相対座標データ出力部と、相対座標データ出力部により出力された相対座標と、SLAM処理部の出力とに基づいて、環境地図上に表示される軌道の形状を表す軌道データを生成する軌道データ生成部とを有する。軌道データ生成部は、環境地図上に表示される基準座標の軌跡を計算し、算出された軌跡に基づいて軌道データを生成する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
演算装置
今日
株式会社日立製作所
回転電機
今日
株式会社日立製作所
放射線モニタ
1か月前
株式会社日立製作所
システム検証方法
23日前
株式会社日立製作所
電力変換システム
8日前
株式会社日立製作所
鉄道車両用空調装置
22日前
株式会社日立製作所
施設管理装置および方法
8日前
株式会社日立製作所
店舗管理装置および方法
23日前
株式会社日立製作所
乗降床及び乗客コンベア
21日前
株式会社日立製作所
生産ライン設計システム
16日前
株式会社日立製作所
署名照合システム及び方法
29日前
株式会社日立製作所
乗りかご及びエレベーター
24日前
株式会社日立製作所
乗りかご及びエレベーター
23日前
株式会社日立製作所
飲食店提案装置および方法
23日前
株式会社日立製作所
検索システム及び検索方法
23日前
株式会社日立製作所
宇宙機、地上局及びアンテナ
8日前
株式会社日立製作所
生体認証装置、生体認証方法
22日前
株式会社日立製作所
ソフトエラー率評価システム
9日前
株式会社日立製作所
IT運用管理装置および方法
1日前
株式会社日立製作所
膜分離設備設計支援システム
8日前
株式会社日立製作所
ソースコードを生成する方法
16日前
株式会社日立製作所
検証システムおよび検証方法
今日
株式会社日立製作所
モータ、及びロータ固定構造
今日
株式会社日立製作所
設計支援装置及び設計支援方法
今日
株式会社日立製作所
物体検出装置および物体検出方法
29日前
株式会社日立製作所
広告支援装置および広告支援方法
1日前
株式会社日立製作所
ガス分離システムの劣化診断装置
8日前
株式会社日立製作所
購入関連行動分析装置および方法
22日前
株式会社日立製作所
立体構造宇宙機及びその制御方法
21日前
株式会社日立製作所
水素製造制御システムおよび方法
2日前
株式会社日立製作所
スカートモール及び乗客コンベア
8日前
株式会社日立製作所
単体テスト装置及び単体テスト方法
24日前
株式会社日立製作所
異常診断装置及び異常診断システム
今日
株式会社日立製作所
テスト支援装置及びテスト支援方法
8日前
株式会社日立製作所
情報処理方法及び情報処理システム
24日前
株式会社日立製作所
情報処理システム及び情報処理方法
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ