TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025171833
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024077542
出願日
2024-05-10
発明の名称
ロボット、ロボット学習データ作成システム、および、ロボット制御方法
出願人
株式会社日立製作所
代理人
弁理士法人磯野国際特許商標事務所
主分類
B25J
3/00 20060101AFI20251113BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】操作者がロボットの動作を教示した際に、直感的に高品質なロボットセンサデータを収集する。
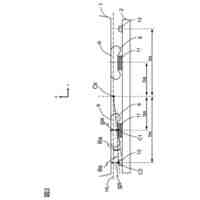
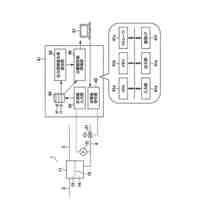
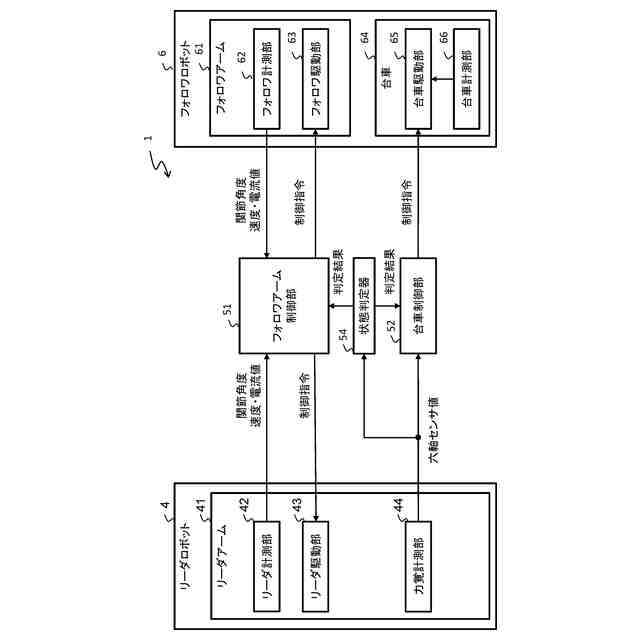
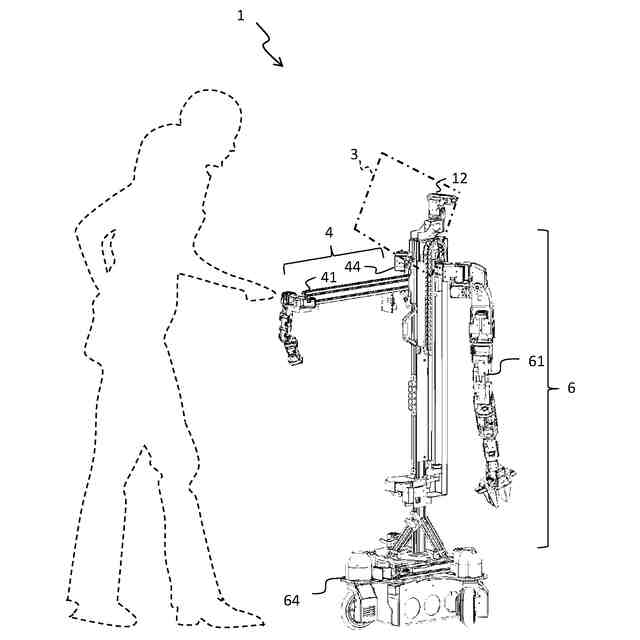
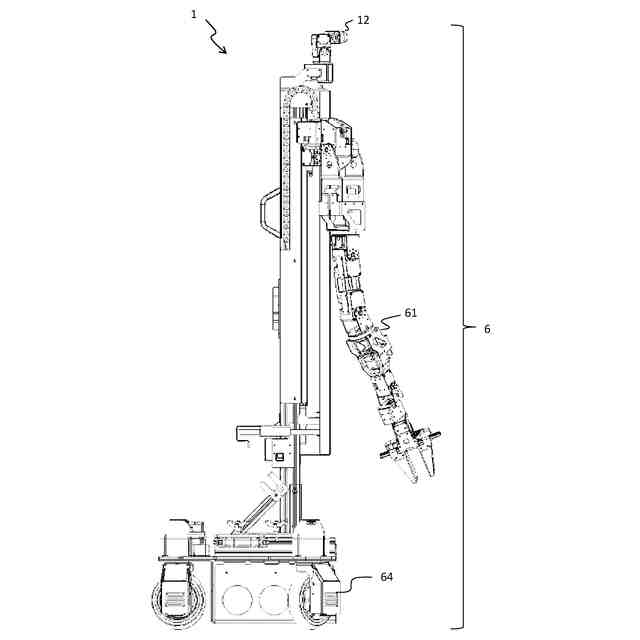
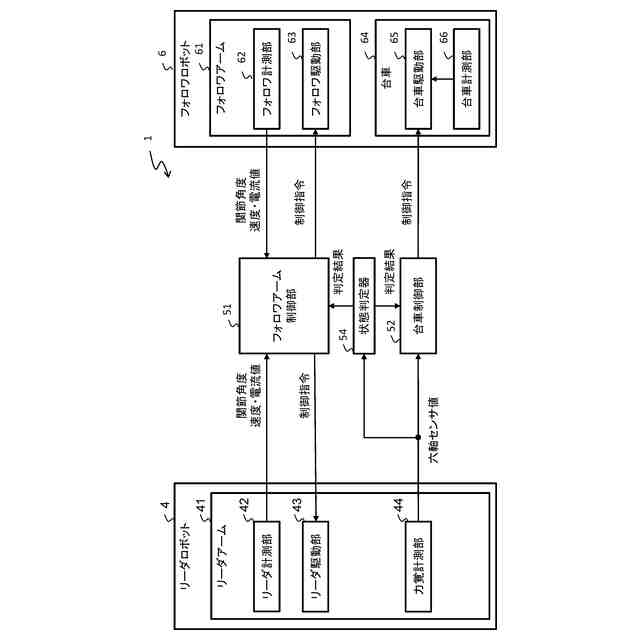
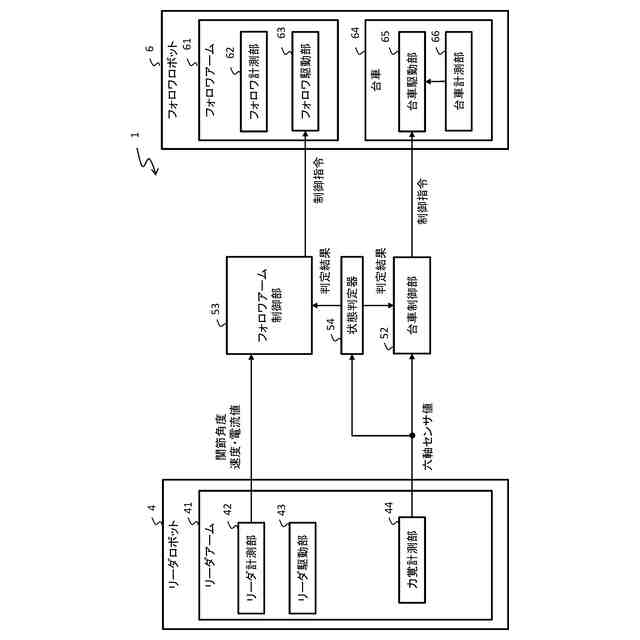
【解決手段】ロボット1は、操作者が操作したアームの姿勢を計測するリーダ計測部42、および当該操作者が操作する力の大きさ及び方向を計測する力覚計測部44を備えるリーダアーム41と、フォロワ駆動部63により駆動されるフォロワアーム61と、台車駆動部65によって移動する台車64と、リーダ計測部42が計測したリーダアーム41の姿勢計測情報と力覚計測部44が計測した力の大きさ及び方向とに基づいて、フォロワ駆動部63によりフォロワアーム61を制御するフォロワアーム制御部51と、リーダ計測部42が計測したリーダアーム41の姿勢計測情報と力覚計測部44が計測した力の大きさ及び方向とに基づいて、台車駆動部65により台車64の移動を制御する台車制御部52とを備える。
【選択図】図5
特許請求の範囲
【請求項1】
操作者が操作したアームの姿勢を計測するリーダ計測部、および前記操作者が操作する力の大きさ及び方向を計測する力覚計測部を備えるリーダアームと、
フォロワ駆動部により駆動されるフォロワアームと、
台車駆動部によって移動する台車と、
前記リーダ計測部が計測した前記リーダアームの姿勢計測情報と前記力覚計測部が計測した力の大きさ及び方向とに基づいて、前記フォロワ駆動部により前記フォロワアームを制御するフォロワアーム制御部と、
前記リーダ計測部が計測した前記リーダアームの姿勢計測情報と前記力覚計測部が計測した力の大きさ及び方向とに基づいて、前記台車駆動部により前記台車の移動を制御する台車制御部と、
を備えることを特徴とするロボット。
続きを表示(約 1,300 文字)
【請求項2】
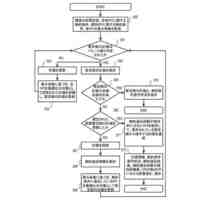
前記力覚計測部が計測した力の大きさに基づいて、前記フォロワアーム制御部及び/又は前記台車制御部を制御するかを判定する状態判定器、
を更に備えることを特徴とする請求項1に記載のロボット。
【請求項3】
前記状態判定器は、前記力覚計測部が計測した力の大きさと前記フォロワアーム及び/又は前記台車を動かす基準となる閾値との関係に基づき、前記台車の移動要否及び前記フォロワアームの駆動要否を判定し、
前記台車制御部は、前記状態判定器の判定結果に基づき、前記台車駆動部による前記台車の移動に反映させ、
前記フォロワアーム制御部は、前記状態判定器の判定結果に基づき、前記フォロワ駆動部による前記フォロワアームの駆動に反映させる、
ことを特徴とする請求項2に記載のロボット。
【請求項4】
前記リーダアームの姿勢に関する所定条件と、前記リーダ計測部が計測した前記リーダアームの姿勢計測情報とに基づき、前記台車の移動要否を判定する状態判定器を備え、
前記台車制御部は、前記状態判定器が出力した判定結果を前記台車駆動部による前記台車の移動に反映させる、
ことを特徴とする請求項1に記載のロボット。
【請求項5】
前記状態判定器は、前記リーダ計測部が計測したリーダアームの姿勢、および前記力覚計測部が計測した力の大きさ及び方向を機械学習モデルに入力して、前記台車の移動要否を判定する、
ことを特徴とする請求項4に記載のロボット。
【請求項6】
前記状態判定器は、前記リーダアームが所定の姿勢状態となったとき、前記台車制御部に移動要とする判定結果を出力する、
ことを特徴とする請求項5に記載のロボット。
【請求項7】
前記状態判定器は、前記リーダアームが所定の姿勢状態を所定時間に亘って継続すると、前記台車制御部に移動要とする判定結果を出力する、
ことを特徴とする請求項6に記載のロボット。
【請求項8】
前記フォロワアームは更に、当該フォロワアームの姿勢を計測するフォロワ計測部を備え、
前記リーダアームは更に、当該リーダアームを駆動するフォロワ駆動部を備え、
前記フォロワアーム制御部は、バイラテラル制御により前記フォロワ計測部が計測したフォロワアームの姿勢を前記リーダアームの制御指令に反映する、
ことを特徴とする請求項1に記載のロボット。
【請求項9】
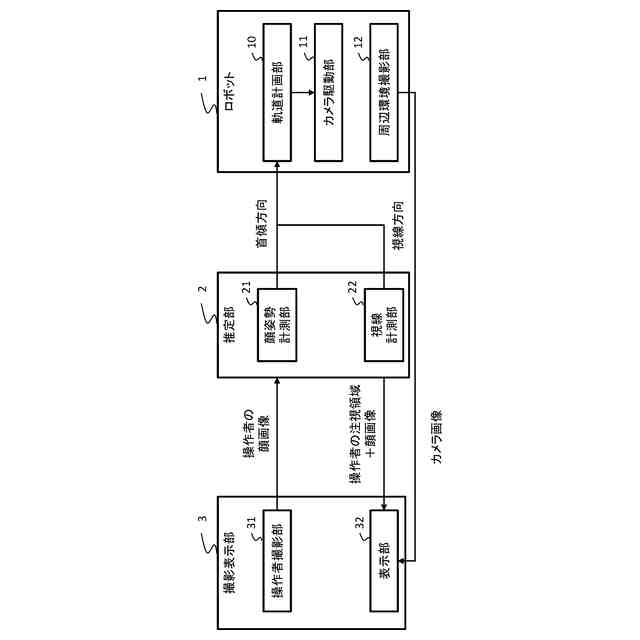
前記ロボットの周辺の環境を撮影する周辺環境撮影部と、
前記操作者を撮影する操作者撮影部と、
前記操作者撮影部の撮影情報を用いて計測した操作者の視線に応じて、前記周辺環境撮影部の向きを駆動する撮影駆動部と、
を更に備えることを特徴とする請求項1に記載のロボット。
【請求項10】
前記フォロワアーム制御部の制御情報、前記周辺環境撮影部の撮像情報を記憶する記憶部、
を更に備えることを特徴とする請求項9に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット、ロボット学習データ作成システム、および、ロボット制御方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、多様な環境変化に対して、ロボットによるロバストな動作を実現するために、遠隔操作を用いてロボットセンサデータを収集し、このロボットセンサデータを学習する模倣学習が多く実施されている。
【0003】
特許文献1には、操作者の動きを認識し、ロボットに操作者の動きを伝えてロボットを操作するロボット遠隔操作において、操作者が装着しているデバイスの中心を操作の基準位置とし、操作者の見ている操作画面方向を操作の基準姿勢とし、ロボットのマニピュレータの中心をロボット動作の基準位置姿勢とする位置合わせ部と、操作者の基準点からデバイスの相対位置姿勢をロボットへの入力とし、操作者の基準点から操作者の見ている操作画面の相対位置姿勢を操作者の視点として、ロボットへの制御指令を生成する制御指令生成部を備える発明が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-157110号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
遠隔操作を用いてロボットセンサデータを収集する際に、移動、マニピュレーション、昇降、視線などを同時に教示することは困難であるという課題がある。
従来の遠隔操作装置は、サイズが大きく、かつロボットが遠隔地にあるため、二次元モニタ端末や仮想現実端末を見ながら状況を判断する必要があり、直感的な動作教示が困難である。
【0006】
これは、二次元モニタ端末による動作教示では、奥行などの判断が難しいことによる。二次元モニタとハプティックデバイスを組み合わせることも考えられる。ハプティックデバイスで収集したロボットの動作教示データの質は高いが、視線、移動および昇降の動作を教示することは難しい。また、ハプティックデバイスは高価である。
【0007】
仮想現端末による動作教示では、操作者の視線を反映でき、比較的廉価である。しかし、仮想現端末による動作教示は、操作性が悪く、かつ、力加減を操作者に伝えることが難しいため、操作慣れが必要である。よって、ロボットの動作教示データの質はあまり良くない。
【0008】
そこで、本発明は、操作者がロボットの動作を教示した際に、直感的に高品質なロボットセンサデータを収集することを課題とする。
【課題を解決するための手段】
【0009】
前記した課題を解決するため、本発明のロボットは、操作者が操作したアームの姿勢を計測するリーダ計測部、および当該操作者が操作する力の大きさ及び方向を計測する力覚計測部を備えるリーダアームと、フォロワ駆動部により駆動されるフォロワアームと、
台車駆動部によって移動する台車と、前記リーダ計測部が計測した前記リーダアームの姿勢計測情報と前記力覚計測部が計測した力の大きさ及び方向とに基づいて、前記フォロワ駆動部により前記フォロワアームを制御するフォロワアーム制御部と、前記リーダ計測部が計測した前記リーダアームの姿勢計測情報と、前記力覚計測部が計測した力の大きさ及び方向とに基づいて、前記台車駆動部により前記台車の移動を制御する台車制御部と、を備えることを特徴とする。
【0010】
本発明のロボットは、操作者が操作したアームの姿勢を計測するリーダ計測部を備えるリーダアームと、フォロワ駆動部により駆動されるフォロワアームと、台車駆動部によって移動する台車と、前記操作者の足を撮影する足撮影部と、前記リーダ計測部が計測した前記リーダアームの姿勢計測情報に基づいて、前記フォロワ駆動部により前記フォロワアームを制御するフォロワアーム制御部と、前記足撮影部が撮影した前記操作者の足の動きに基づいて、前記台車駆動部により前記台車の移動を制御する台車制御部と、を備えることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社日立製作所
鉄道車両
1か月前
株式会社日立製作所
放射線モニタ
1か月前
株式会社日立製作所
ガス分離システム
1か月前
株式会社日立製作所
システム検証方法
19日前
株式会社日立製作所
電力変換システム
4日前
株式会社日立製作所
調停案提示システム
1か月前
株式会社日立製作所
鉄道車両用空調装置
18日前
株式会社日立製作所
店舗管理装置および方法
19日前
株式会社日立製作所
乗降床及び乗客コンベア
17日前
株式会社日立製作所
生産ライン設計システム
12日前
株式会社日立製作所
施設管理装置および方法
4日前
株式会社日立製作所
乗りかご及びエレベーター
19日前
株式会社日立製作所
データ変換装置および方法
1か月前
株式会社日立製作所
署名照合システム及び方法
25日前
株式会社日立製作所
乗りかご及びエレベーター
20日前
株式会社日立製作所
飲食店提案装置および方法
19日前
株式会社日立製作所
検索システム及び検索方法
19日前
株式会社日立製作所
ソフトエラー率評価システム
5日前
株式会社日立製作所
ソースコードを生成する方法
12日前
株式会社日立製作所
膜分離設備設計支援システム
4日前
株式会社日立製作所
宇宙機、地上局及びアンテナ
4日前
株式会社日立製作所
生体認証装置、生体認証方法
18日前
株式会社日立製作所
立体構造宇宙機及びその制御方法
17日前
株式会社日立製作所
治療効果予測システムおよび方法
1か月前
株式会社日立製作所
購入関連行動分析装置および方法
18日前
株式会社日立製作所
物体検出装置および物体検出方法
25日前
株式会社日立製作所
スカートモール及び乗客コンベア
4日前
株式会社日立製作所
ガス分離システムの劣化診断装置
4日前
株式会社日立製作所
計算機システム及びデータ送信方法
26日前
株式会社日立製作所
単体テスト装置及び単体テスト方法
20日前
株式会社日立製作所
テスト支援装置及びテスト支援方法
4日前
株式会社日立製作所
情報処理方法及び情報処理システム
20日前
株式会社日立製作所
欠陥検査システム、及び欠陥検査方法
4日前
株式会社日立製作所
計算機システム及び障害対処支援方法
1か月前
株式会社日立製作所
データ処理装置およびデータ処理方法
17日前
株式会社日立製作所
計算機システムおよびアクセス検証方法
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ