TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025169614
公報種別
公開特許公報(A)
公開日
2025-11-14
出願番号
2024074479
出願日
2024-05-01
発明の名称
車両制御装置
出願人
ダイハツ工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
30/16 20200101AFI20251107BHJP(車両一般)
要約
【課題】自車を途中で停止させずに目標停止位置まで走行させることが可能な車両制御装置を提供する。
【解決手段】本発明にかかる車両制御装置は、目標加速度に基づいて自車を走行させる車両制御装置であって、目標加速度に基づいてブレーキ制御を行うブレーキ制御手段と、停止した先行車に追従する自車をブレーキ制御により目標停止位置に停止させる制御手段と、を有し、制御手段は、先行車が停止したこと且つ自車が走行する路面勾配が所定値以上であることが条件である第1の条件が成立した場合に目標加速度を抑制し、先行車と自車との間の実車間距離と、自車の目標停止位置までの距離との差が、所定値を下回ったことが条件である第2の条件が成立した場合に、ブレーキ制御により自車を目標停止位置に停止させることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
目標加速度に基づいて自車を走行させる車両制御装置であって、
前記目標加速度に基づいてブレーキ制御を行うブレーキ制御手段と、
停止した先行車に追従する自車を前記ブレーキ制御により目標停止位置に停止させる制御手段と、
を有し、
前記制御手段は、
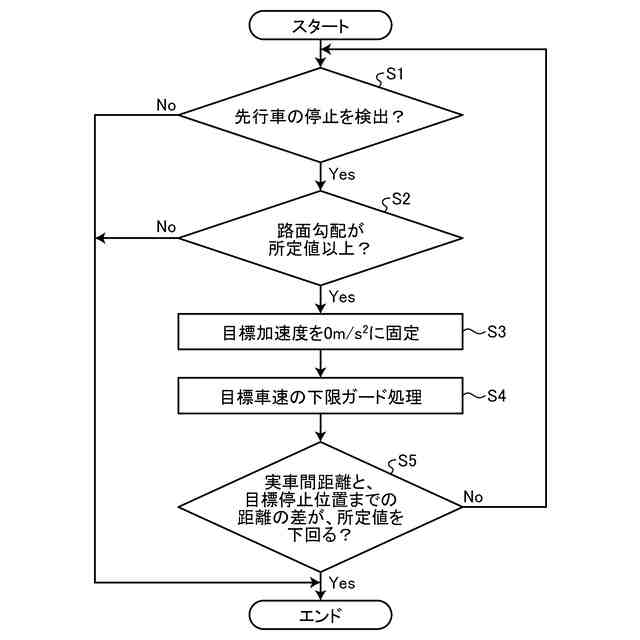
先行車が停止したこと且つ自車が走行する路面勾配が所定値以上であることが条件である第1の条件が成立した場合に前記目標加速度を抑制し、
先行車と自車との間の実車間距離と、自車の前記目標停止位置までの距離との差が、所定値を下回ったことが条件である第2の条件が成立した場合に、前記ブレーキ制御により自車を前記目標停止位置に停止させる、
車両制御装置。
続きを表示(約 100 文字)
【請求項2】
前記制御手段は、
前記第1の条件が成立した場合に前記目標加速度の抑制と共に自車の実車速が所定値を下回らないように維持する、
請求項1に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、車両の機能の一つに、先行車と自車との間の車間距離を確保しながら自車を走行させるクルーズコントロール機能があり、そのうちの一つに、全車速追従機能付きACC(Adaptive Cruise Control)などと呼ばれる、速度の下限制限がない追従走行制御機能がある。この全車速追従機能付きでは、ペダル操作なしで、先行車との車間距離を確保しながら先行車に追従し、先行車が速度を落として停止すると、自車も速度を落として先行車から車間距離を確保した位置の目標停止位置で停止させたり、自車を再発進させたりする、速度の下限制限のない制御を行う。
【0003】
特許文献1には、先行車と自車との距離を検出して、車間距離をあらかじめ設定された目標値に一致させるように車両制御し、上り勾配の場合は車間距離の目標値を減少させて車両制御する車両制御の技術が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開平05-294170号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、全車速追従機能は、平坦路の走行だけでなく登坂路などの走行においても作動させることができる。登坂路のように上り勾配の走行時は、自車が重力加速度の影響を受けるため自車の実加速度は平坦路の走行時よりも小さくなる。このため、自車は、上り勾配で停止した先行車に対し、全車速追従機能の働きで減速して停止する制御が行われることになるが、急な勾配の場合には、重力加速度の影響を受けて、自車が目標停止位置まで届かずに、目標停止位置より手前で停止してしまう。自車が目標停止位置より手前で停止すると、全車速追従機能の働きで、自車の停止位置を目標停止位置に合わせるために、自車を再発進させ、その後も、自車が目標停止位置よりも手前で停止した場合は、目標停止位置まで停止と再発進とが繰り返される制御が続く。このように、急な登り勾配では、自車が一旦停止した後に目標停止位置まで再発進と停止とが繰り返されるため、ドライバが自身で運転するときのフィーリングに合わず、煩わしさなどを感じさせる可能性がある。
【0006】
本発明の目的は、自車を途中で停止させずに目標停止位置まで走行させることが可能な車両制御装置を提供することである。
【課題を解決するための手段】
【0007】
前記の目的を達成するため、本発明にかかる車両制御装置は、目標加速度に基づいて自車を走行させる車両制御装置であって、前記目標加速度に基づいてブレーキ制御を行うブレーキ制御手段と、停止した先行車に追従する自車を前記ブレーキ制御により目標停止位置に停止させる制御手段と、を有し、前記制御手段は、先行車が停止したこと且つ自車が走行する路面勾配が所定値以上であることが条件である第1の条件が成立した場合に前記目標加速度を抑制し、先行車と自車との間の実車間距離と、自車の前記目標停止位置までの距離との差が、所定値を下回ったことが条件である第2の条件が成立した場合に、前記ブレーキ制御により自車を前記目標停止位置に停止させることを特徴とする。
【発明の効果】
【0008】
本発明によれば、自車を途中で停止させずに目標停止位置まで走行させることができる。
【図面の簡単な説明】
【0009】
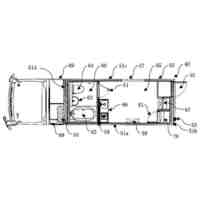
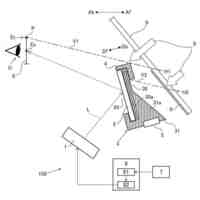
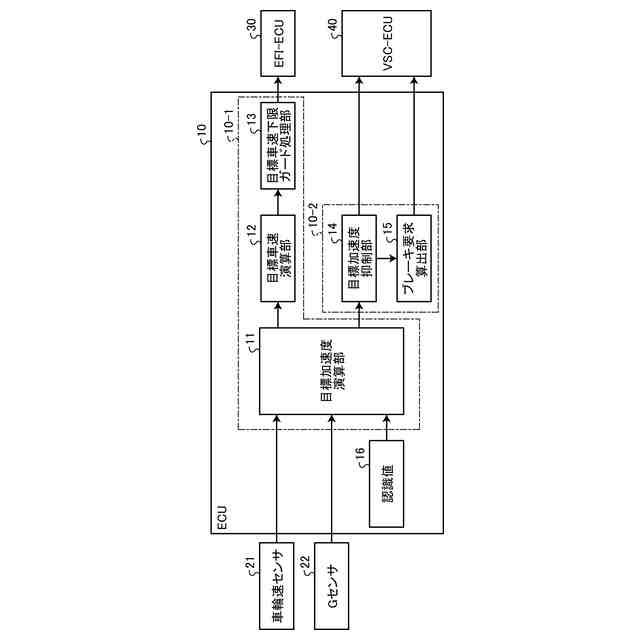
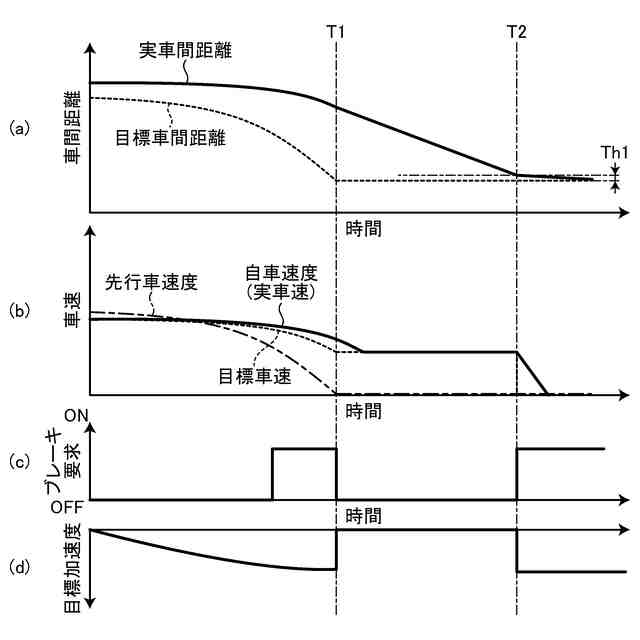
図1は、実施の形態にかかる車両制御装置をECUに適用した場合のシステム構成の一例を示す図である。
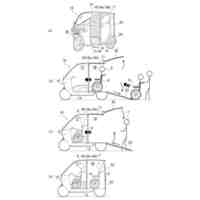
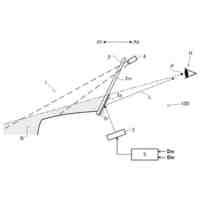
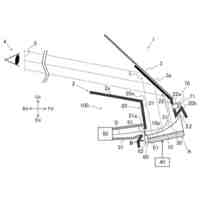
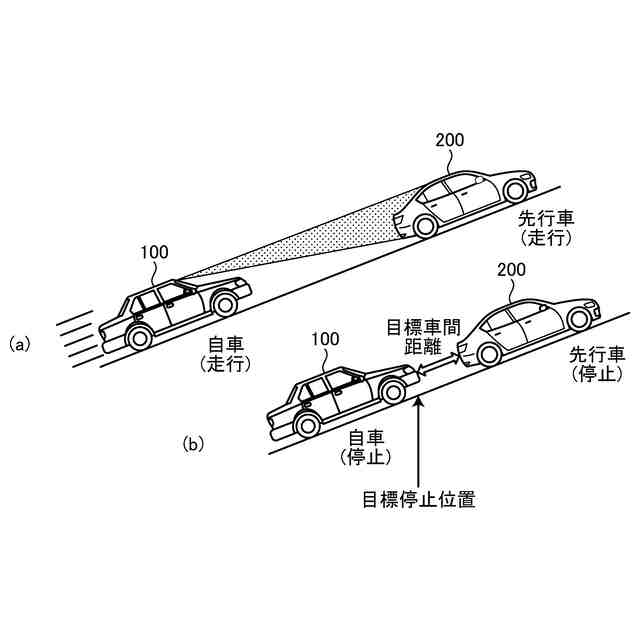
図2は、所定値以上の上り勾配において、停止した先行車に追従して自車を目標停止位置に停止させる場合の、停止前と停止後の車両を示した図である。
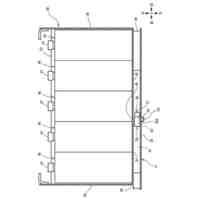
図3は、図2に示される車両のブレーキ制御について説明する図である。
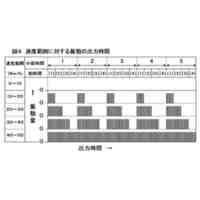
図4は、自車の停止制御フローの一例を示す図である。
【発明を実施するための形態】
【0010】
以下では、添付図面を参照し、本発明の実施の形態である車両制御装置について詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
タイヤレバー
4か月前
個人
前輪キャスター
3か月前
個人
上部一体型自動車
2か月前
個人
タイヤ脱落防止構造
3か月前
個人
ルーフ付きトライク
4か月前
個人
空間形成装置
1か月前
個人
マスタシリンダ
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
4か月前
個人
車両通過構造物
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
照明装置
1か月前
個人
乗合路線バスの客室装置
4か月前
個人
常設収納型サンバイザー
1か月前
株式会社豊田自動織機
産業車両
1か月前
株式会社ニフコ
収納装置
3か月前
個人
回転窓ワイパー装置
1か月前
個人
車載小物入れ兼雨傘収納具
5か月前
個人
音声ガイド、音声サービス
4か月前
株式会社ニフコ
照明装置
3か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
画像投映装置
2か月前
日本精機株式会社
車載表示装置
1か月前
個人
円湾曲ホイール及び球体輪
4か月前
日本精機株式会社
車室演出装置
3か月前
日本精機株式会社
車載表示装置
1か月前
株式会社豊田自動織機
産業車両
4か月前
日本精機株式会社
車載表示装置
2か月前
個人
聴覚と触覚を利用する速度計
5日前
日本精機株式会社
車両用表示装置
今日
日本精機株式会社
車両用表示装置
2か月前
個人
音による速度計とプログラム
1か月前
株式会社SUBARU
車両
2か月前
日本無線株式会社
取付金具
4か月前
極東開発工業株式会社
車両
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ