TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025165228
公報種別
公開特許公報(A)
公開日
2025-11-04
出願番号
2024069205
出願日
2024-04-22
発明の名称
ワイパ制御装置
出願人
株式会社デンソーエレクトロニクス
代理人
弁理士法人ゆうあい特許事務所
主分類
B60S
1/08 20060101AFI20251027BHJP(車両一般)
要約
【課題】簡素な構成でワイパの回転角度を推定するとともに、ワイパのオーバーランを抑制するワイパ制御装置を提供する。
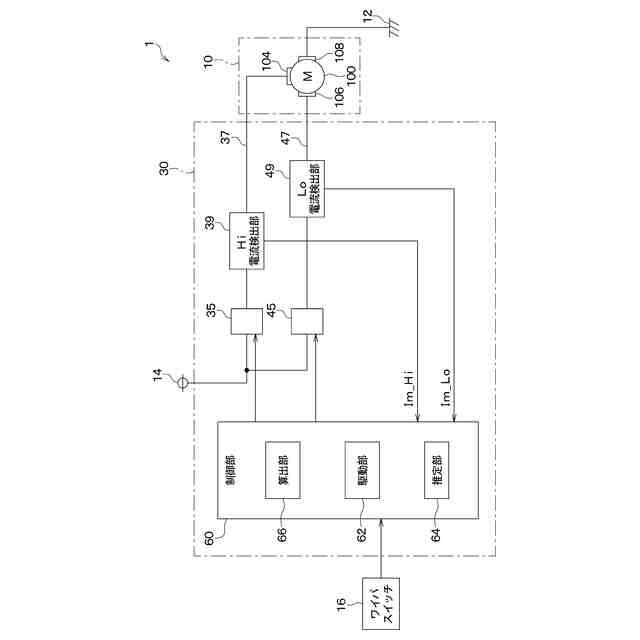
【解決手段】ワイパ制御装置30の算出部66は、電流リップルの周期であるリップル周期に基づいて、減速開始角度を算出する。また、駆動部62は、ワイパ角度が減速開始角度になるとき、オンしているHiスイッチ35またはLoスイッチ45をオフさせる。これにより、駆動部62は、Hiスイッチ35またはLoスイッチ45からワイパモータ100への電力供給を停止させることで、ワイパを減速させる。さらに、ワイパ角度が減速開始角度になった後、ワイパ位置が下反転位置、下反転位置よりも前の位置、上反転位置および上反転位置よりも前の位置のいずれかであるとき、駆動部62は、オフしたHiスイッチ35またはLoスイッチ45をオンさせることで、ワイパモータ100への電力供給を再開させる。
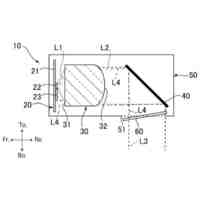
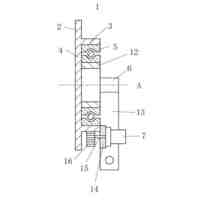
【選択図】図1
特許請求の範囲
【請求項1】
ワイパ制御装置であって、
オンすることにより、第1位置(Pd)および第2位置(Pu)を往復するワイパ(90)を駆動させるワイパモータ(100)に電流を流すことで前記ワイパモータを回転させる素子(35、45)と、
前記素子のオンオフを制御する駆動部(62)と、
前記ワイパモータに流れる電流(Im_Hi、Im_Lo)に関する値を取得する取得部(S200)と、
前記ワイパモータに流れる電流のうち前記ワイパモータの駆動に応じた周期性を有する電流リップル(Ir)に基づいて、前記ワイパの回転角度であるワイパ角度(θw)を推定する推定部(S210)と、
前記電流リップルの周期であるリップル周期(T)に基づいて、前記ワイパの位置が前記第1位置および前記第2位置になる前の前記ワイパ角度であって前記ワイパの減速を開始させる前記ワイパ角度である減速開始角度(θb)を算出する算出部(66)と、
を備え、
前記駆動部は、
前記素子がオンしている場合に、前記ワイパ角度が前記減速開始角度になるとき、前記素子をオンからオフさせることにより、前記素子から前記ワイパモータへの電力供給を停止させることで、前記ワイパを減速させ、
前記ワイパ角度が前記減速開始角度になった後、前記ワイパの位置が前記第1位置、前記第1位置よりも前の位置、前記第2位置および前記第2位置よりも前の位置のいずれかであるとき、前記素子をオフからオンさせることにより、前記素子から前記ワイパモータへの電力供給を再開させるワイパ制御装置。
続きを表示(約 2,800 文字)
【請求項2】
前記算出部は、前記リップル周期に基づいて、前記ワイパ角度が前記減速開始角度になったときから前記素子をオフからオンさせるときまでの時間である減速制御時間(Tb)を算出し、
前記駆動部は、前記ワイパ角度が前記減速開始角度になってから前記減速制御時間が経過した後、前記素子をオフからオンさせることにより、前記ワイパモータへの電力供給を再開させる請求項1に記載のワイパ制御装置。
【請求項3】
前記ワイパモータは、
電力が供給される第1端子(104)と、
前記第1端子に供給される電力よりも小さい電力が供給される第2端子(106)と、
を有し、
前記素子は、第1素子(35)であって、
前記第1素子は、オンすることにより、前記第1端子を介して前記ワイパモータに電流を流すことで前記ワイパモータを回転させ、
前記ワイパ制御装置は、オンすることにより、前記第2端子を介して前記ワイパモータに電流を流すことで前記ワイパモータを回転させる第2素子(45)を備え、
前記駆動部は、
前記第1素子および前記第2素子のオンオフを制御し、
前記第1素子がオン、前記第2素子がオフしている場合に、前記ワイパ角度が前記減速開始角度になるとき、
前記第1素子をオンからオフさせることにより、前記第1素子から前記ワイパモータへの電力供給を停止させ、
前記第2素子をオフからオンさせることにより、前記第2素子から前記ワイパモータへの電力を供給させることで、前記ワイパを減速させ、
前記ワイパ角度が前記減速開始角度になった後、前記ワイパの位置が前記第1位置、前記第1位置よりも前の位置、前記第2位置および前記第2位置よりも前の位置のいずれかであるとき、
前記第1素子をオフからオンさせることにより、前記第1素子から前記ワイパモータへの電力供給を再開させ、
前記第2素子をオンからオフさせることにより、前記第2素子から前記ワイパモータへの電力供給を停止させる請求項1に記載のワイパ制御装置。
【請求項4】
前記ワイパモータは、
電力が供給される第1端子(104)と、
前記第1端子に供給される電力よりも小さい電力が供給される第2端子(106)と、
を有し、
前記素子は、第1素子(35)であって、
前記第1素子は、オンすることにより、前記第1端子を介して前記ワイパモータに電流を流すことで前記ワイパモータを回転させ、
前記ワイパ制御装置は、オンすることにより、前記第2端子を介して前記ワイパモータに電流を流すことで前記ワイパモータを回転させる第2素子(45)を備え、
前記駆動部は、
前記第1素子および前記第2素子のオンオフを制御し、
前記第1素子がオン、前記第2素子がオフしている場合に、前記ワイパ角度が前記減速開始角度になるとき、
前記第1素子をオンからオフさせることにより、前記第1素子から前記ワイパモータへの電力供給を停止させ、前記第2素子をオフのままとさせることで、前記ワイパを減速させ、
前記ワイパ角度が前記減速開始角度になった後、前記ワイパの位置が前記第1位置、前記第1位置よりも前の位置、前記第2位置および前記第2位置よりも前の位置のいずれかであるとき、前記第1素子をオフからオンさせることにより、前記第1素子から前記ワイパモータへの電力供給を再開させ、前記第2素子をオフのままとさせる請求項1に記載のワイパ制御装置。
【請求項5】
前記駆動部は、
前記第2素子がオン、前記第1素子がオフしている場合に、前記ワイパ角度が前記減速開始角度になるとき、
前記第2素子をオンからオフさせることにより、前記第2素子から前記ワイパモータへの電力供給を停止させ、前記第1素子をオフのままとさせることで、前記ワイパを減速させ、
前記ワイパ角度が前記減速開始角度になった後、前記ワイパの位置が前記第1位置、前記第1位置よりも前の位置、前記第2位置および前記第2位置よりも前の位置のいずれかであるとき、前記第2素子をオフからオンさせることにより、前記第2素子から前記ワイパモータへの電力供給を再開させ、前記第1素子をオフのままとさせる請求項3または4に記載のワイパ制御装置。
【請求項6】
前記ワイパモータは、
電力が供給される第1端子(104)と、
前記第1端子に供給される電力よりも小さい電力が供給される第2端子(106)と、
を有し、
前記素子は、第1素子(45)であって、
前記第1素子は、オンすることにより、前記第2端子を介して前記ワイパモータに電流を流すことで前記ワイパモータを回転させ、
前記ワイパ制御装置は、オンすることにより、前記第1端子を介して前記ワイパモータに電流を流すことで前記ワイパモータを回転させる第2素子(35)を備え、
前記駆動部は、
前記第1素子および前記第2素子のオンオフを制御し、
前記第1素子がオン、前記第2素子がオフしている場合に、前記ワイパ角度が前記減速開始角度になるとき、
前記第1素子をオンからオフさせることにより、前記第1素子から前記ワイパモータへの電力供給を停止させ、前記第2素子をオフのままとさせることで、前記ワイパを減速させ、
前記ワイパ角度が前記減速開始角度になった後、前記ワイパの位置が前記第1位置、前記第1位置よりも前の位置、前記第2位置および前記第2位置よりも前の位置のいずれかであるとき、前記第1素子をオフからオンさせることにより、前記第1素子から前記ワイパモータへの電力供給を再開させ、前記第2素子をオフのままとさせる請求項1または2に記載のワイパ制御装置。
【請求項7】
前記推定部は、前記ワイパモータに流れる電流の変化量(ΔIm)の絶対値が閾値(ΔIm_th)以上であるときの回数(N)に基づいて、前記ワイパ角度を推定する請求項1に記載のワイパ制御装置。
【請求項8】
前記推定部は、前記ワイパモータに流れる電流が閾値(Im_th)未満から前記閾値以上となるときの回数(N)に基づいて、前記ワイパ角度を推定する請求項1に記載のワイパ制御装置。
【請求項9】
前記推定部は、前記ワイパモータに流れる電流が閾値(Im_th)よりも大きいときから前記閾値以下となるときの回数(N)に基づいて、前記ワイパ角度を推定する請求項1に記載のワイパ制御装置。
【請求項10】
前記算出部は、前記回数に基づいて、前記リップル周期を算出する請求項7ないし9のいずれか1つに記載のワイパ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ワイパ制御装置に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、特許文献1に記載されているように、正逆転駆動される電動モータによりワイパアームを上反転位置と下反転位置との間で往復払拭動作させるワイパ装置の制御方法が知られている。この制御方法では、ワイパアームは、両反転位置の少なくともいずれか一方の近傍において、ワイパアームの速度と負荷に基づいて算出された制動開始位置から両反転位置に向かって減速制御される。また、ワイパアームの速度は、電動モータの回転に伴って出力されるモータパルス周期に基づいて検出される。モータパルスは、電動モータ位置検出用のホールICから出力される、電動モータの回転軸が1回転するにつき6周期分のパルスである。さらに、電動モータは、パルス幅変調方式によってパルス駆動され、ワイパアームの負荷は、パルスのオン時間とオフ時間の比に基づいて検出される。また、ワイパアームの制動開始位置は、ワイパアームの速度と負荷をパラメータとするマップによって決定される。
【先行技術文献】
【特許文献】
【0003】
特開2004-196195号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されたワイパ装置の制御方法では、ワイパアームの速度を検出するために電動モータ位置検出用のホールICが必要となる。これにより、電動モータ位置検出用のホールICの配線が必要となることから、特許文献1に記載されたワイパ装置の構成が複雑化する。また、ワイパアームが動作するとき、上反転位置または下反転位置にてワイパアームが慣性力によって速度を有している場合、設計上狙った上反転位置または下反転位置を行き過ぎることであるオーバーランが発生することがある。このオーバーランの抑制も求められている。
【0005】
本開示は、簡素な構成でワイパの回転角度を推定するとともに、ワイパのオーバーランを抑制するワイパ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、ワイパ制御装置であって、オンすることにより、第1位置(Pd)および第2位置(Pu)を往復するワイパ(90)を駆動させるワイパモータ(100)に電流を流すことでワイパモータを回転させる素子(35、45)と、素子のオンオフを制御する駆動部(62)と、ワイパモータに流れる電流(Im_Hi、Im_Lo)に関する値を取得する取得部(S200)と、ワイパモータに流れる電流のうちワイパモータの駆動に応じた周期性を有する電流リップル(Ir)に基づいて、ワイパの回転角度であるワイパ角度(θw)を推定する推定部(S210)と、電流リップルの周期であるリップル周期(T)に基づいて、ワイパの位置が第1位置および第2位置になる前のワイパ角度であってワイパの減速を開始させるワイパ角度である減速開始角度(θb)を算出する算出部(66)と、を備え、駆動部は、素子がオンしている場合に、ワイパ角度が減速開始角度になるとき、素子をオンからオフさせることにより、素子からワイパモータへの電力供給を停止させることで、ワイパを減速させ、ワイパ角度が減速開始角度になった後、ワイパの位置が第1位置、第1位置よりも前の位置、第2位置および第2位置よりも前の位置のいずれかであるとき、素子をオフからオンさせることにより、素子からワイパモータへの電力供給を再開させるワイパ制御装置である。
【0007】
これにより、電動モータ位置検出用のホールICを設けることなく、ワイパ角度が推定される。このため、電動モータ位置検出用のホールICの配線を設ける必要がなくなる。したがって、簡素な構成でワイパ角度θwが推定される。また、ワイパは、第1位置または第2位置の直前から減速されることにより、第1位置または第2位置で滑らかに反転する。これによって、狙った第1位置または第2位置をワイパが行き過ぎることであるワイパのオーバーランが抑制される。
【0008】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0009】
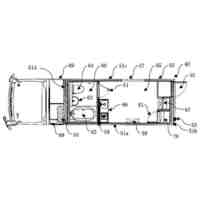
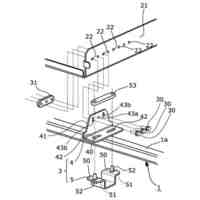
第1実施形態のワイパ制御装置が用いられるワイパ駆動システムの構成図。
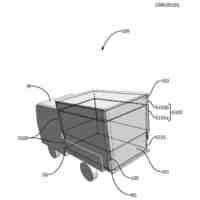
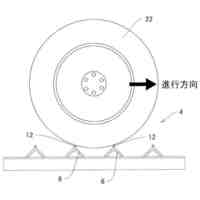
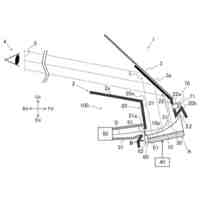
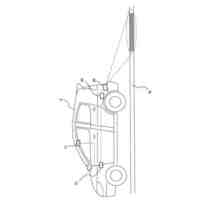
ワイパ駆動システムのワイパを示す図。
ワイパ駆動システムのワイパモータに流れる電流と時間との関係図。
ワイパ制御装置の駆動部の処理を示すフローチャート。
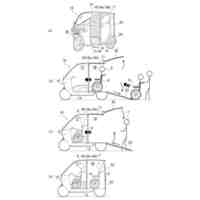
駆動部の処理を説明するためのワイパ角度とHiスイッチおよびLoスイッチのオンオフとの関係図。
駆動部の処理を説明するためのワイパ角度とHiスイッチおよびLoスイッチのオンオフとの関係図。
ワイパ制御装置の推定部の処理を示すフローチャート。
推定部によるパルス数の算出を説明するための図。
ワイパ制御装置の算出部の処理を示すフローチャート。
算出部による減速開始角度の算出を説明するためのリップル周期と減速開始角度との関係図。
算出部による減速制御時間の算出を説明するためのリップル周期と減速制御時間との関係図。
第2実施形態のワイパ制御装置の駆動部の処理を説明するためのワイパ角度とHiスイッチおよびLoスイッチのオンオフとの関係図。
他の実施形態のワイパ制御装置が用いられるワイパ駆動システムの構成図。
他の実施形態のワイパ制御装置における推定部によるパルス数の算出を説明するための図。
他の実施形態のワイパ制御装置における算出部による減速制御時間の算出を説明するためのリップル周期と減速制御時間との関係図。
【発明を実施するための形態】
【0010】
以下、実施形態について図面を参照しつつ説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、同一符号を付し、その説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
タイヤレバー
4か月前
個人
前輪キャスター
3か月前
個人
上部一体型自動車
2か月前
個人
ルーフ付きトライク
4か月前
個人
空間形成装置
1か月前
個人
タイヤ脱落防止構造
3か月前
個人
マスタシリンダ
2か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
4か月前
個人
車両通過構造物
4か月前
個人
常設収納型サンバイザー
1か月前
個人
乗合路線バスの客室装置
4か月前
日本精機株式会社
車載表示装置
2か月前
日本精機株式会社
車室演出装置
3か月前
日本精機株式会社
車載表示装置
1か月前
日本精機株式会社
車載表示装置
1か月前
株式会社ニフコ
照明装置
3か月前
株式会社ニフコ
収納装置
2か月前
日本精機株式会社
画像投映装置
2か月前
個人
円湾曲ホイール及び球体輪
4か月前
日本精機株式会社
車載表示装置
1か月前
株式会社豊田自動織機
産業車両
4か月前
株式会社豊田自動織機
産業車両
1か月前
個人
回転窓ワイパー装置
1か月前
個人
音声ガイド、音声サービス
4か月前
個人
音による速度計とプログラム
1か月前
日本精機株式会社
車両用表示装置
4か月前
極東開発工業株式会社
車両
4か月前
株式会社SUBARU
車両
1か月前
日本精機株式会社
車両用報知装置
1か月前
日本無線株式会社
取付金具
4か月前
日本精機株式会社
車両用投影装置
2か月前
日本精機株式会社
車両用表示装置
2か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ