TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025159846
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2024062654
出願日
2024-04-09
発明の名称
撮像装置および撮像装置の補正方法、補正プログラム
出願人
パナソニックIPマネジメント株式会社
代理人
弁理士法人新樹グローバル・アイピー
主分類
H04N
23/68 20230101AFI20251015BHJP(電気通信技術)
要約
【課題】大きな並進振れ/移動に対して撮影方向を適切に補正することが可能な撮像装置および撮像装置の補正方法、補正プログラムを提供する。
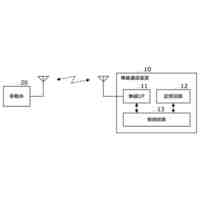
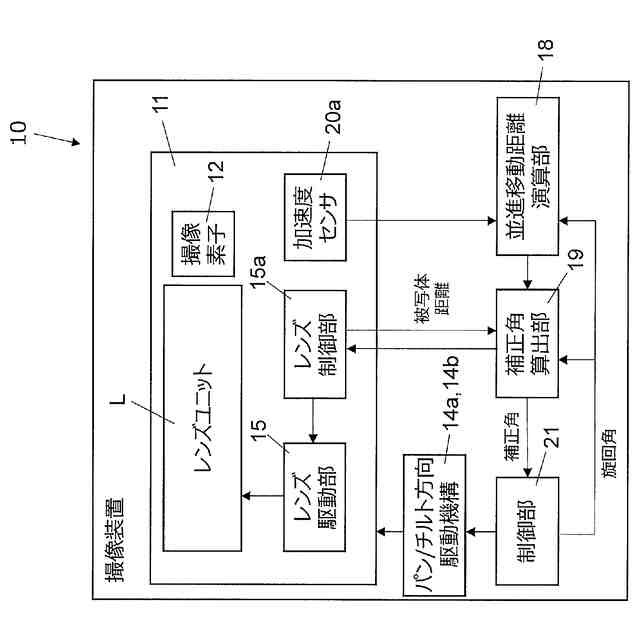
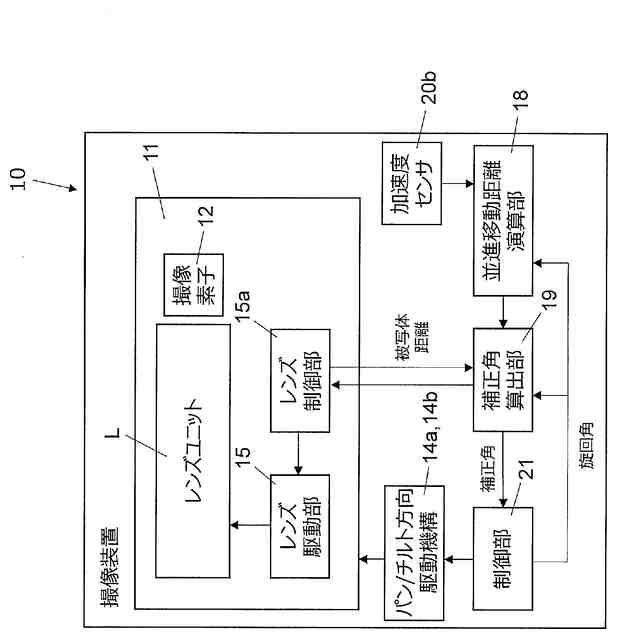
【解決手段】撮像装置10は、カメラヘッド部11、ベース部16、パン/チルト方向駆動機構14a,14b、加速度センサ20a、レンズ制御部15a、補正角算出部19、制御部21を備える。ベース部16は、カメラヘッド部11が旋回可能な状態で取り付けられる。パン/チルト方向駆動機構14a,14bは、パン方向およびチルト方向におけるカメラヘッド部11の向きを調整する。加速度センサ20aは、被写体に対する並進の移動距離を取得する。レンズ制御部15aは、被写体までの距離情報を取得する。補正角算出部19は、移動距離と被写体までの距離情報とに基づいて補正角を算出する。制御部21は、補正角に基づいてパン/チルト方向駆動機構14a,14bを制御する。
【選択図】図2
特許請求の範囲
【請求項1】
被写体に対して並進移動しながら撮影を行う撮像装置であって、
前記被写体の撮影を行うカメラ部と、
前記カメラ部が旋回可能な状態で取り付けられるベース部と、
パン方向およびチルト方向における前記カメラ部の向きの調整を行う姿勢調整機構と、
前記被写体に対する並進の移動距離を取得する移動距離情報取得部と、
前記被写体までの距離情報を取得する被写体距離情報取得部と、
前記移動距離と前記被写体までの距離情報とに基づいて、前記カメラ部が前記被写体の方向に向き続けるための補正角を算出する補正角算出部と、
前記補正角に基づいて、前記パン方向および/または前記チルト方向における前記カメラ部の向きを補正するように前記姿勢調整機構を制御する制御部と、
を備えている撮像装置。
続きを表示(約 1,500 文字)
【請求項2】
前記被写体に対して焦点位置を合わせるように移動するレンズユニットと、
前記レンズユニットの光軸方向において、前記レンズユニットを前後に移動させるレンズ駆動部と、
前記移動距離と前記被写体までの距離情報とに基づいて、前記被写体の大きさが変化しないようにするための焦点距離補正量を算出する補正量算出部と、
前記焦点距離補正量に基づいて前記レンズユニットの位置を補正するように前記レンズ駆動部を制御するレンズ制御部と、
をさらに備えている、
請求項1に記載の撮像装置。
【請求項3】
移動時の加速度を取得する加速度センサを、さらに備え、
前記移動距離情報取得部は、前記加速度センサにおいて検出された加速度を2回積分して算出された移動距離を取得する、
請求項1または2に記載の撮像装置。
【請求項4】
前記加速度センサは、前記カメラ部に設けられており、
前記補正角算出部は、前記チルト方向における旋回角を用いて前記補正角を算出する、
請求項3に記載の撮像装置。
【請求項5】
前記加速度センサは、前記ベース部に設けられており、
前記補正角算出部は、前記パン方向および/またはチルト方向における旋回角を用いて前記補正角を算出する、
請求項3に記載の撮像装置。
【請求項6】
前記移動距離情報取得部は、外部装置から送信される撮像装置の位置情報に基づいて前記移動距離を取得する、
請求項1または2に記載の撮像装置。
【請求項7】
前記被写体に対して焦点位置を合わせるように移動するレンズユニットと、前記レンズユニットを光軸方向において前後に移動させるレンズ駆動部と、前記レンズユニットの位置を変化させるように前記レンズ駆動部を制御するレンズ制御部と、をさらに備え、
前記被写体距離情報取得部は、前記レンズユニットの前記焦点位置に基づいて、前記被写体までの距離情報を取得する、
請求項1に記載の撮像装置。
【請求項8】
前記被写体までの距離を測定する測距センサを、さらに備え、
前記被写体距離情報取得部は、前記測距センサにおいて測定された前記被写体までの距離を取得する、
請求項1または2に記載の撮像装置。
【請求項9】
前記被写体距離情報取得部は、外部装置から送信される撮像装置の位置情報に基づいて前記被写体までの距離を取得する、
請求項1または2に記載の撮像装置。
【請求項10】
被写体に対して並進移動しながら撮影を行う撮像装置の補正方法であって、
前記撮像装置の姿勢調整機構が、前記被写体の撮影を行うカメラ部のパン方向およびチルト方向における向きの調整を行うステップと、
前記撮像装置の移動情報取得部が、並進方向における移動距離を取得するステップと、
前記撮像装置の被写体距離情報取得部が、前記被写体までの距離情報を取得するステップと、
前記撮像装置の補正角算出部が、前記移動距離と前記被写体までの距離情報とに基づいて、前記カメラ部が前記被写体の方向に向き続けるための補正角を算出するステップと、
前記撮像装置の制御部が、前記補正角に基づいて、パン方向および/またはチルト方向における前記カメラ部の向きを補正するように前記姿勢調整機構を制御するステップと、
を備えている撮像装置の補正方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、例えば、映像等の撮影を行う撮像装置および撮像装置の補正方法、補正プログラムに関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年、映像等を撮影する撮像装置において、映像撮影におけるYaw/Pitch/Rollの回転振れや上下/左右の並進振れを補正する方法として、レンズや撮像素子をシフトする光学式や、広い範囲で撮影した映像の切り出し範囲を変える電子式の振れ補正を行う画像振れ補正装置が用いられている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2009-139827号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の画像振れ補正装置では、以下に示すような問題点を有している。
すなわち、上記公報に開示された画像振れ補正装置では、電子式の振れ補正によってシフトできる量や撮像範囲には限界(補正角の限界)があることから、大きな並進振れ/移動に対して、撮影方向が被写体の方向を向くように補正することが難しいという課題があった。
【0005】
本開示の課題は、大きな並進振れ/移動に対して撮影方向を適切に補正することが可能な撮像装置および撮像装置の補正方法、補正プログラムを提供することにある。
【課題を解決するための手段】
【0006】
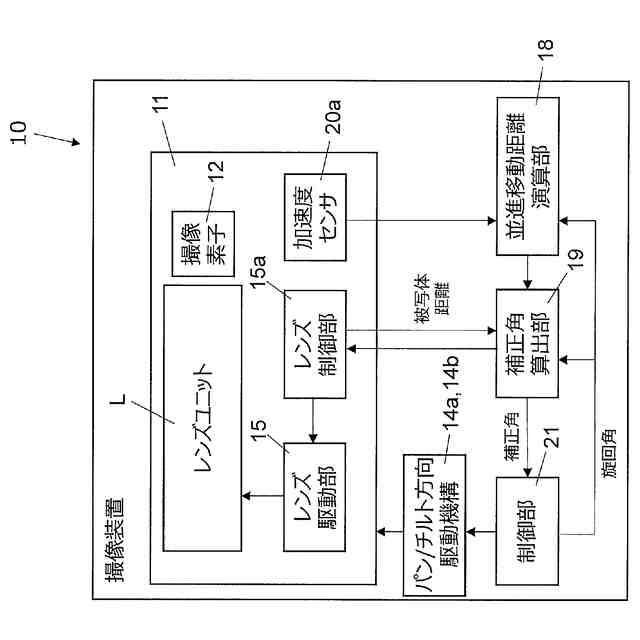
本開示に係る撮像装置は、被写体に対して並進移動しながら撮影を行う撮像装置であって、カメラ部と、ベース部と、姿勢調整機構と、移動距離情報取得部と、被写体距離情報取得部と、補正角算出部と、制御部と、を備えている。カメラ部は、被写体の撮影を行う。ベース部は、カメラ部が旋回可能な状態で取り付けられる。姿勢調整機構は、パン方向およびチルト方向におけるカメラ部の向きの調整を行う。移動距離情報取得部は、被写体に対する並進の移動距離を取得する。被写体距離情報取得部は、被写体までの距離情報を取得する。補正角算出部は、移動距離と被写体までの距離情報とに基づいて、カメラ部が被写体の方向に向き続けるための補正角を算出する。制御部は、補正角に基づいて、パン方向および/またはチルト方向におけるカメラ部の向きを補正するように姿勢調整機構を制御する。
【発明の効果】
【0007】
本開示に係る撮像装置によれば、大きな並進振れ/移動に対して撮影方向を適切に補正することができる。
【図面の簡単な説明】
【0008】
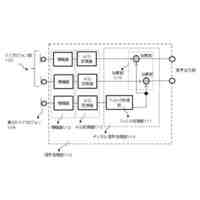
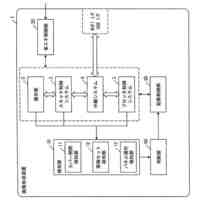
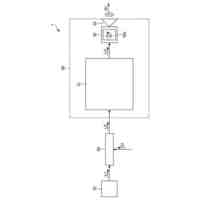
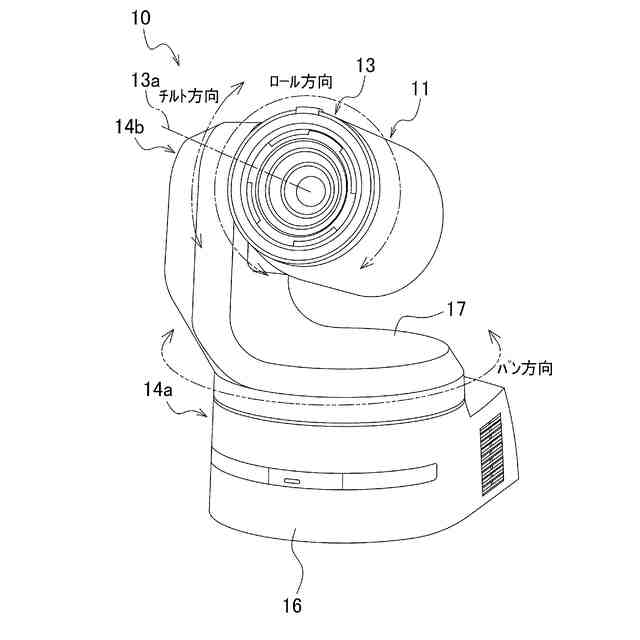
本開示の一実施形態に係る撮像装置の構成を示す全体斜視図。
図1の撮像装置の制御ブロック図。
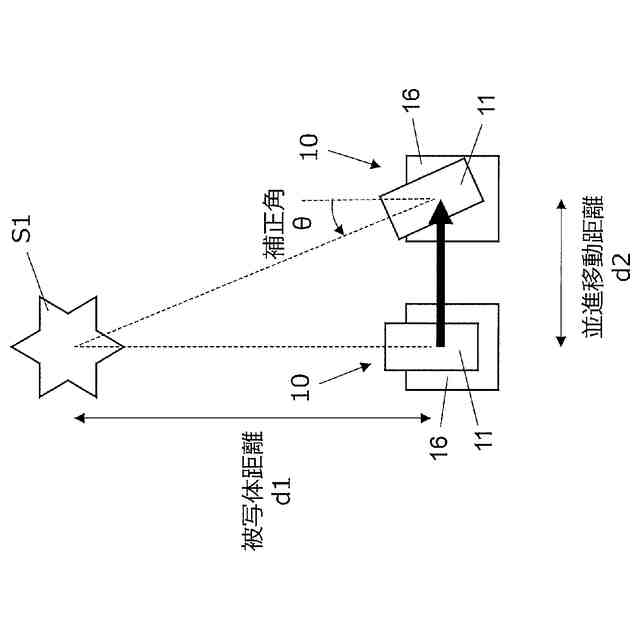
図1の撮像装置を被写体に対して左右に並進移動させながら被写体を撮影する際の補正角を示す概念図。
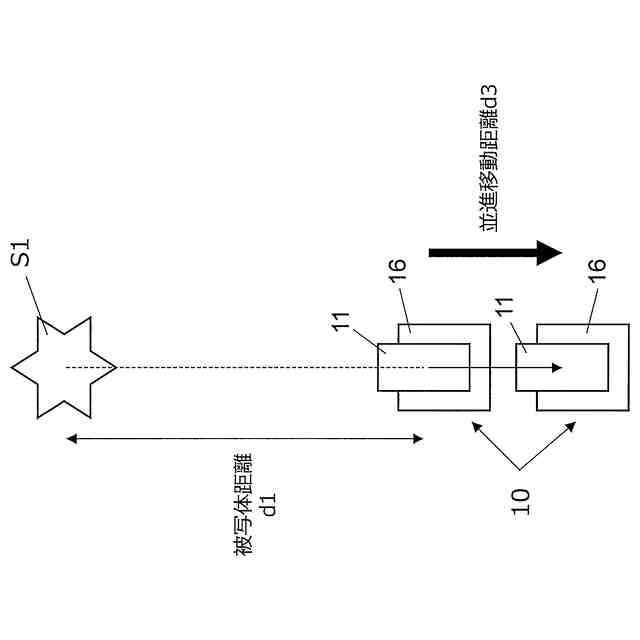
図1の撮像装置を被写体に対して前後に並進移動させながら被写体を撮影する際のズーム位置の調整を示す概念図。
図4Aに示す並進移動時のズーム位置の調整による撮影範囲を示す概念図。
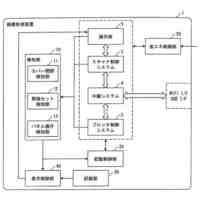
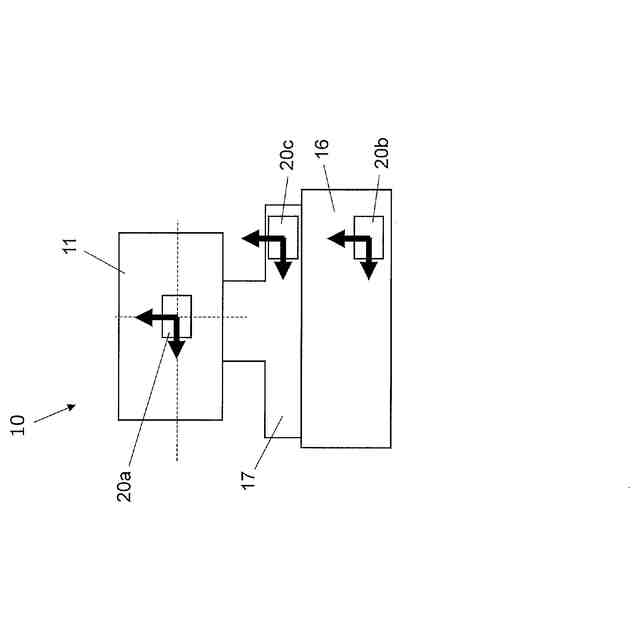
図2の撮像装置に搭載された加速度センサの配置をカメラヘッド部の外部に変更した構成を示す制御ブロック図。
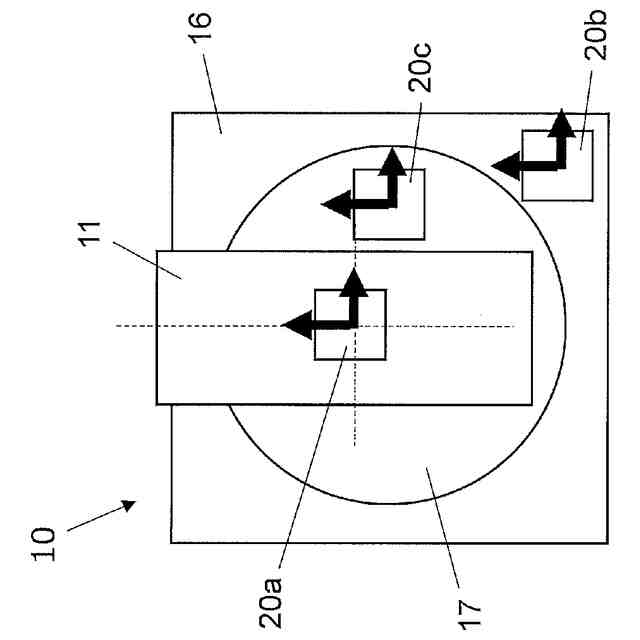
図2の撮像装置における加速度センサの配置例を示す上面図。
図6Aの撮像装置をパン方向へ旋回させた状態を示す上面図。
図2の撮像装置における加速度センサの配置例を示す上面図。
図7Aの撮像装置をチルト方向へ旋回させた状態を示す上面図。
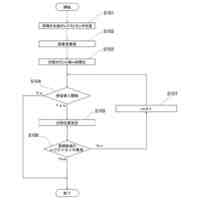
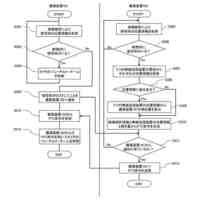
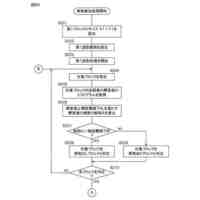
図6A等に示す加速度センサがカメラヘッド部に設けられている撮像装置におけるパン/チルト方向における撮像装置の補正方法の処理の流れを示すフローチャート。
図6A等に示す加速度センサがベース部に設けられている撮像装置におけるパン/チルト方向における撮像装置の補正方法の処理の流れを示すフローチャート。
図6A等に示す加速度センサがカメラヘッド部に設けられている撮像装置におけるズーム方向における撮像装置の補正方法の処理の流れを示すフローチャート。
図6A等に示す加速度センサがベース部に設けられている撮像装置におけるズーム方向における撮像装置の補正方法の処理の流れを示すフローチャート。
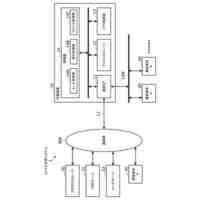
本開示の他の実施形態に係る撮像装置の構成を示す制御ブロック図。
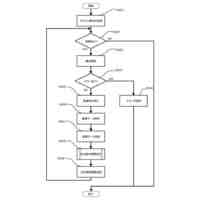
図10の撮像装置において実行される撮像装置の補正方法の処理の流れを示すフローチャート。
本開示のさらに他の実施形態に係る撮像装置の構成を示す制御ブロック図。
【発明を実施するための形態】
【0009】
以下、適宜図面を参照しながら、実施の形態を詳細に説明する。ただし、必要以上に詳細な説明は省略する場合がある。例えば、既によく知られた事項の詳細説明や実質的に同一の構成に対する重複説明を省略する場合がある。これは、以下の説明が不必要に冗長になるのを避け、当業者の理解を容易にするためである。
なお、出願人は、当業者が本開示を十分に理解するために添付図面および以下の説明を提供するのであって、これらによって特許請求の範囲に記載の主題を限定することを意図するものではない。
【0010】
(実施形態1)
本開示の一実施形態に係る撮像装置10について、図1~図9Bを用いて説明すれば以下の通りである。
(1)撮像装置10全体の構成
本実施形態に係る撮像装置10は、例えば、撮影スタジオ、会議場、イベント会場、スポーツ施設等に設置され、PC(Personal Computer)等のコントローラによって制御されて各種撮影を行う。撮像装置10は、図1に示すように、パン方向、チルト方向およびロール方向において、それぞれ撮影する方向を切り替えながら撮影を行う。また、撮像装置10は、図1に示すように、カメラヘッド部11に複数の光学レンズを含むレンズユニットLを内蔵しており、光学レンズの相対的な位置を変化させるように制御することで、撮影範囲(ズーム範囲)、フォーカス位置を変化させて撮影を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
イヤーマフ
5日前
個人
監視カメラシステム
14日前
キーコム株式会社
光伝送線路
15日前
WHISMR合同会社
収音装置
1か月前
サクサ株式会社
中継装置
20日前
個人
スキャン式車載用撮像装置
14日前
サクサ株式会社
中継装置
21日前
キヤノン株式会社
撮像装置
2か月前
アイホン株式会社
電気機器
1か月前
個人
映像表示装置、及びARグラス
今日
キヤノン電子株式会社
画像読取装置
1か月前
サクサ株式会社
無線通信装置
20日前
サクサ株式会社
無線通信装置
20日前
株式会社リコー
画像形成装置
7日前
キヤノン電子株式会社
画像読取装置
13日前
株式会社リコー
画像形成装置
1か月前
サクサ株式会社
無線システム
19日前
株式会社リコー
画像形成装置
2か月前
株式会社リコー
画像形成装置
2か月前
個人
ワイヤレスイヤホン対応耳掛け
1か月前
キヤノン株式会社
撮像システム
1か月前
ブラザー工業株式会社
読取装置
2か月前
個人
発信機及び発信方法
19日前
日本電気株式会社
海底分岐装置
15日前
株式会社NTTドコモ
端末
15日前
株式会社NTTドコモ
端末
14日前
大日本印刷株式会社
写真撮影装置
1か月前
キヤノン電子株式会社
画像処理システム
13日前
国立大学法人電気通信大学
小型光学装置
2か月前
株式会社NTTドコモ
端末
15日前
株式会社NTTドコモ
端末
14日前
株式会社NTTドコモ
端末
14日前
パテントフレア株式会社
水中電波通信法
2か月前
パテントフレア株式会社
超高速電波通信
1か月前
シャープ株式会社
端末装置
12日前
沖電気工業株式会社
画像形成装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ