TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154311
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057234
出願日
2024-03-29
発明の名称
自車蛇行検出装置
出願人
矢崎エナジーシステム株式会社
代理人
弁理士法人栄光事務所
主分類
G08G
1/00 20060101AFI20251002BHJP(信号)
要約
【課題】白線がなかったり、白線が消えかけたりしている道路上でも精度よく自車両の蛇行を検出することができる自車蛇行検出装置を提供する。
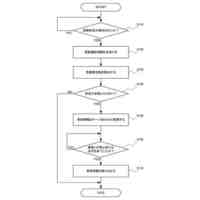
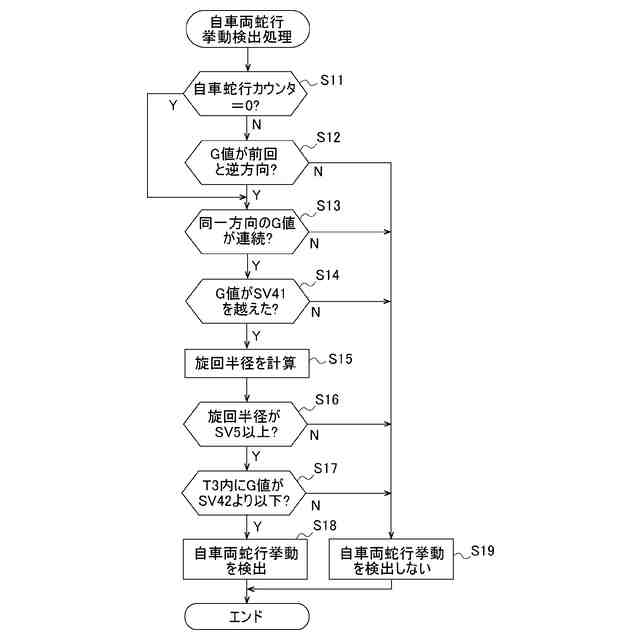
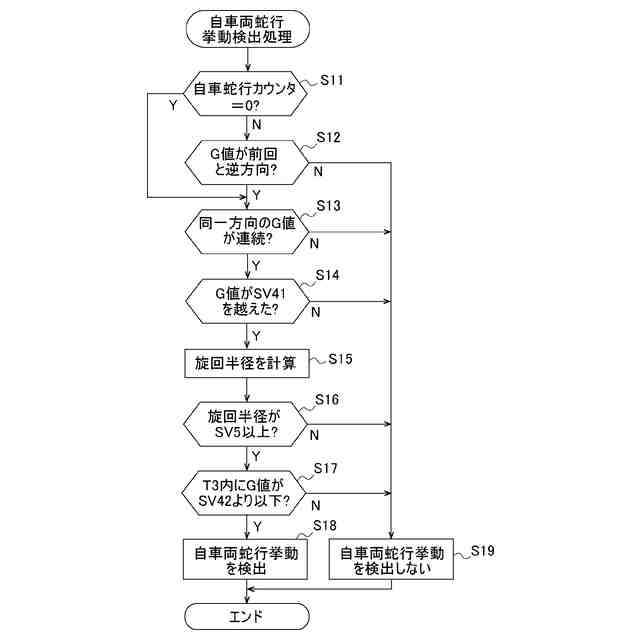
【解決手段】CPU2が、左右方向何れか一方の設定値SV41を超えた後、設定値SV41よりも小さい設定値SV42以下になる自車蛇行挙動を検出すると、自車蛇行カウンタをカウントアップし、その後、左右G値が、前回、自車蛇行カウンタをカウントアップしたときとは逆の設定値SV41を超えた後、設定値SV42以下になる自車蛇行挙動を検出する毎に自車蛇行カウンタをカウントアップする。CPU2は、自車蛇行カウンタが設定値SV11を超えたとき、自車蛇行を検出する。
【選択図】図8
特許請求の範囲
【請求項1】
車両に搭載されたGセンサによって検出された左右G値に基づいて自車両の蛇行を検出する自車蛇行検出装置であって、
前記左右G値が左右にそれぞれ設定された第1閾値を交互に超えた回数をカウントし、第1所定時間内に前記カウントした回数が所定回数を超えた場合、自車蛇行を検出する自車蛇行検出部を備えた、
自車蛇行検出装置。
続きを表示(約 680 文字)
【請求項2】
請求項1に記載の自車蛇行検出装置であって、
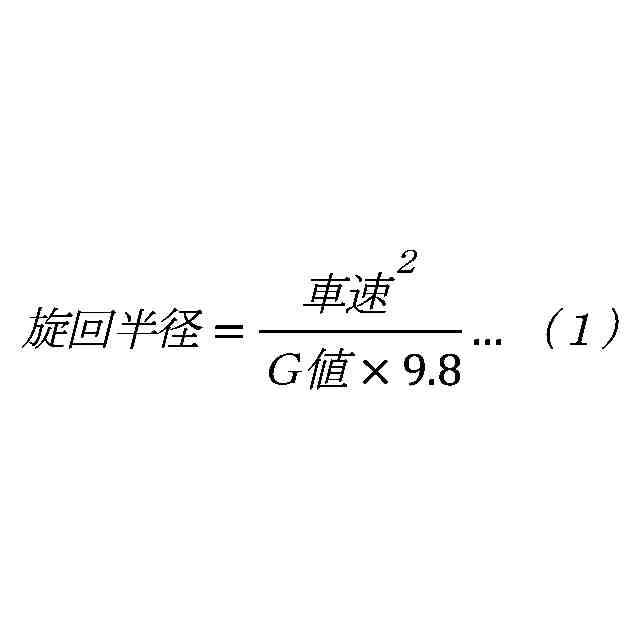
前記自車蛇行検出部は、前記自車両の旋回半径が所定半径より小さい場合、前記自車蛇行を検出しない、
自車蛇行検出装置。
【請求項3】
請求項1に記載の自車蛇行検出装置であって、
前記左右G値が、左右方向何れか一方の前記第1閾値を超えた後、前記第1閾値よりも小さい第2閾値以下になる自車蛇行挙動を検出すると、自車蛇行カウンタをカウントアップし、その後、前記左右G値が、前回、前記自車蛇行カウンタをカウントアップしたときとは逆の前記第1閾値を超えた後、前記第2閾値以下になる自車蛇行挙動を検出する毎に前記自車蛇行カウンタをカウントアップする自車カウント部を有し、
前記自車蛇行カウンタが前記所定回数を超えたとき、自車蛇行を検出する、
自車蛇行検出装置。
【請求項4】
請求項3に記載の自車蛇行検出装置であって、
前記自車カウント部は、前回、前記自車蛇行挙動を検出してから、今回、前記自車蛇行挙動を検出するまでの時間が第2所定時間以上の場合、前記自車蛇行カウンタをリセットする、
自車蛇行検出装置。
【請求項5】
請求項3に記載の自車蛇行検出装置であって、
前記自車カウント部は、前記左右G値が前記第2閾値以下から前記第1閾値を越えて再び前記第2閾値以下になるまでの時間が第3所定時間以上である場合、前記自車蛇行挙動を検出せずに前記自車蛇行カウンタをカウントアップしない、
自車蛇行検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車蛇行検出装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来、カメラにより撮影された画像から白線を検出し、白線と自車両との横方向の位置関係に基づいて自車両の走行軌跡の時系列変化から自車両の蛇行を検出する車載器が提案されている(特許文献1)。しかしながら、全ての道路に白線があるわけでなく、白線がなかったり、白線が消えかけたりしている道路上では、白線を検出することができず自車両の蛇行を検出することができない、という課題があった。
【先行技術文献】
【特許文献】
【0003】
特開2020-2024580号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、白線がなかったり、白線が消えかけたりしている道路上でも精度よく自車両の蛇行を検出することができる自車蛇行検出装置を提供することにある。
【課題を解決するための手段】
【0005】
前述した目的を達成するために、本発明に係る自車蛇行検出装置は、下記を特徴としている。
車両に搭載されたGセンサによって検出された左右G値に基づいて自車両の蛇行を検出する自車蛇行検出装置であって、
前記左右G値が左右にそれぞれ設定された第1閾値を交互に超えた回数をカウントし、第1所定時間内に前記カウントした回数が所定回数を超えた場合、自車蛇行を検出する自車蛇行検出部を備えた、
自車蛇行検出装置であること。
【発明の効果】
【0006】
本発明に係る自車蛇行検出装置によれば、白線がなかったり、白線が消えかけたりしている道路上でも精度よく自車両の蛇行を検出することができる、との効果を奏する。
【0007】
以上、本発明について簡潔に説明した。更に、以下に説明される発明を実施するための形態(以下、「実施形態」という。)を添付の図面を参照して通読することにより、本発明の詳細は更に明確化されるであろう。
【図面の簡単な説明】
【0008】
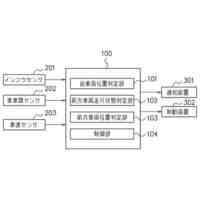
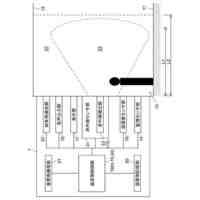
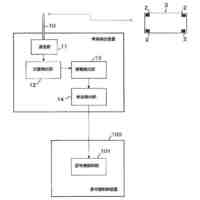
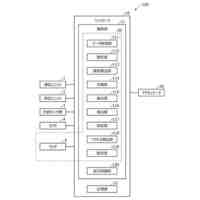
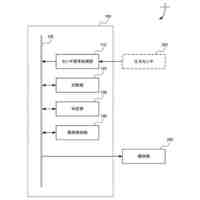
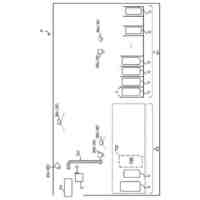
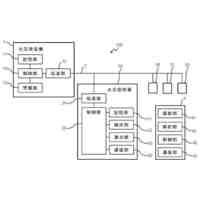
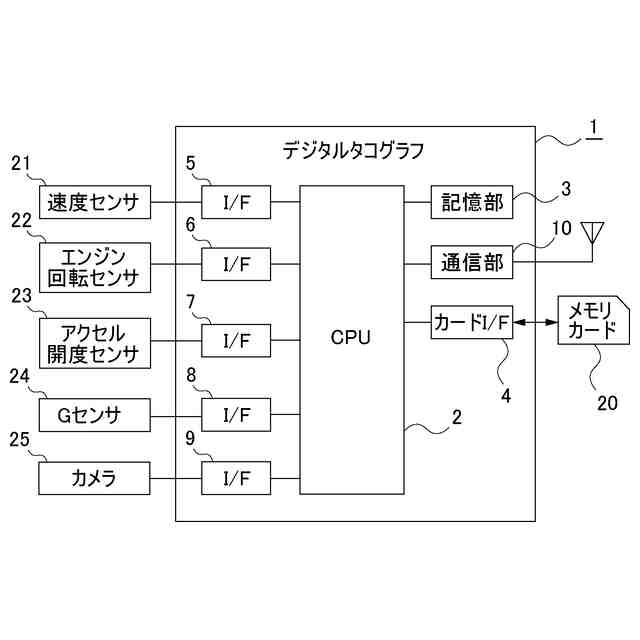
図1は、本発明の自車蛇行検出装置を組み込んだデジタルタコグラフの一実施形態を示すブロック図である。
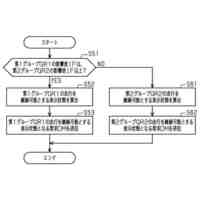
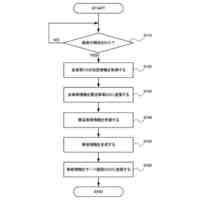
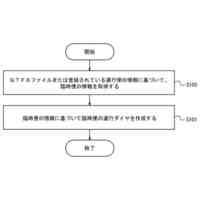
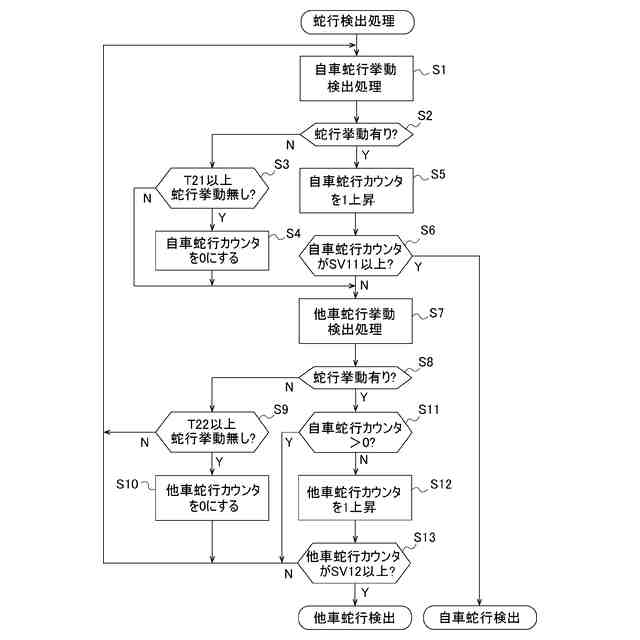
図2は、図1に示すCPUが実行する、蛇行検出処理における処理手順を示すフローチャートである。
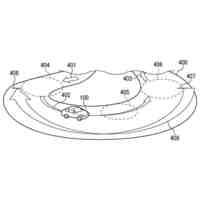
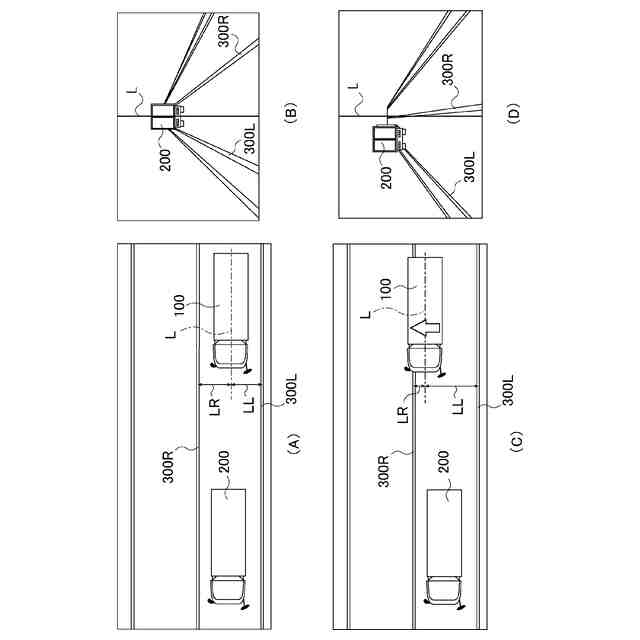
図3は、白線を用いた図2に示す自車蛇行挙動検出処理を説明するための説明図である。
図4は、白線を用いた図2に示す自車蛇行挙動検出処理を説明するための説明図である。
図5は、蛇行運転したときの左右G値のタイムチャートである。
図6は、車線変更したときの左右G値のタイムチャートである。
図7は、連続カーブを運転したときの左右G値のタイムチャートである。
図8は、Gセンサを用いた図2に示す自車蛇行挙動検出処理における処理手順を示すフローチャートである。
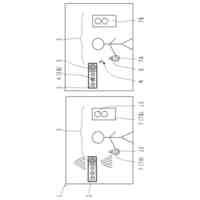
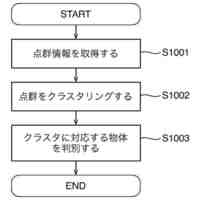
図9は、図2に示す他車蛇行挙動検出処理を説明するための説明図である。
図10は、図2に示す他車蛇行挙動検出処理を説明するための説明図である。
【発明を実施するための形態】
【0009】
本発明に関する具体的な実施形態について、各図を参照しながら以下に説明する。本実施形態では、本発明の自車蛇行検出装置をトラック等の車両に搭載されるデジタルタコグラフ1内に組み込んだ例について説明する。
【0010】
図1は、本発明の他車蛇行検出装置を組み込んだデジタルタコグラフ1の一実施形態を示すブロック図である。デジタルタコグラフ1は、例えば運送会社が管理するトラック車両(以下、単に「車両」と称する。)に搭載される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精機株式会社
警報システム
1か月前
株式会社SUBARU
車両
5日前
個人
自動電動車椅子
26日前
エムケー精工株式会社
車両誘導装置
1か月前
スズキ株式会社
運転支援装置
1か月前
ニッタン株式会社
検知器
1か月前
ニッタン株式会社
検知器
1か月前
個人
磁気路上での車両の路線離脱防御
15日前
ニッタン株式会社
検知器
1か月前
ニッタン株式会社
検知器
12日前
株式会社国際電気
防災システム
1か月前
大阪瓦斯株式会社
音声出力システム
11日前
日本信号株式会社
異常走行検出装置
19日前
株式会社小糸製作所
移動体検出装置
1か月前
株式会社SUBARU
運転支援装置
13日前
トヨタ自動車株式会社
サーバ
19日前
三菱自動車工業株式会社
制御システム
11日前
株式会社CCT
通信装置及び表示方法
12日前
日本精機株式会社
報知装置及び報知システム
25日前
株式会社小糸製作所
車両検出システム
1か月前
株式会社デンソー
運航管理装置
4日前
能美防災株式会社
火災感知器
1か月前
株式会社SUBARU
事故情報収集装置
5日前
本田技研工業株式会社
物体検出装置
1か月前
能美防災株式会社
非常伝達装置
1か月前
株式会社SUBARU
車室内異常検知装置
5日前
ホーチキ株式会社
火災検出システム
7日前
ヨシモトポール株式会社
接近報知システム
1か月前
大阪瓦斯株式会社
音声出力装置
6日前
シャープ株式会社
駐車制御装置
18日前
株式会社豊田中央研究所
注意喚起装置
27日前
能美防災株式会社
火災感知器及び火災報知システム
4日前
トヨタ自動車株式会社
方法
1か月前
愛知製鋼株式会社
マーカシステム及び制御方法
1か月前
ALSOK株式会社
警備システム及び警備方法
26日前
コイト電工株式会社
情報処理装置
5日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ