TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025150889
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024052043
出願日
2024-03-27
発明の名称
操作アシスト制御システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/20 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】作業者の操作の難易度および負担を軽減させ、かつ、作業機械を安定的に運転できるようにする。
【解決手段】操作部60aは、走行操作およびアタッチメント操作を、作業者が行うことが可能に構成される。走行操作は、下部走行体11を走行させる操作である。アタッチメント操作は、下部走行体11に対してアタッチメント15を動かす操作である。走行操作およびアタッチメント操作のうち一方の操作は、コントローラ70に設定された条件が満たされた場合にコントローラ70が自動的に行う自動操作である。走行操作およびアタッチメント操作のうち、一方の操作とは異なる操作は、作業者の操作によるマニュアル操作である。
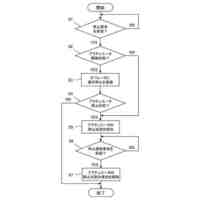
【選択図】図5
特許請求の範囲
【請求項1】
走行可能な走行体と、
前記走行体に対して動き、作業を行うアタッチメントと、
前記走行体を走行させる操作である走行操作、および、前記走行体に対して前記アタッチメントを動かす操作であるアタッチメント操作、を作業者が行うことが可能に構成された操作部と、
コントローラと、
を備え、
前記走行操作および前記アタッチメント操作のうち一方の操作は、前記コントローラに設定された条件が満たされた場合に前記コントローラが自動的に行う自動操作であり、
前記走行操作および前記アタッチメント操作のうち前記一方の操作とは異なる操作は、作業者の操作によるマニュアル操作である、
操作アシスト制御システム。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の操作アシスト制御システムであって、
前記走行操作は、前記自動操作であり、
前記アタッチメント操作は、前記マニュアル操作である、
操作アシスト制御システム。
【請求項3】
請求項1に記載の操作アシスト制御システムであって、
前記走行操作は、前記マニュアル操作であり、
前記アタッチメント操作は、前記自動操作である、
操作アシスト制御システム。
【請求項4】
請求項3に記載の操作アシスト制御システムであって、
前記コントローラは、特定のパターンの動きを前記アタッチメントが繰り返すように、前記自動操作の前記アタッチメント操作を実行する、
操作アシスト制御システム。
【請求項5】
請求項1に記載の操作アシスト制御システムであって、
前記コントローラによる前記自動操作の有無を、作業者の操作により切り替え可能な自動操作切替部を備える、
操作アシスト制御システム。
【請求項6】
請求項1に記載の操作アシスト制御システムであって、
前記コントローラは、前記コントローラに設定された特定操作が前記マニュアル操作により行われているか否かに応じて、前記自動操作の有無を切り替える、
操作アシスト制御システム。
【請求項7】
請求項1に記載の操作アシスト制御システムであって、
前記操作部は、前記自動操作の操作対象を、作業者が操作するための自動操作対象操作部を備え、
前記コントローラが前記自動操作を実行している時に、前記コントローラに設定された操作量閾値を超える操作が前記自動操作対象操作部で行われた場合、前記コントローラは、前記自動操作を無効とし、前記操作対象は、前記自動操作対象操作部により前記マニュアル操作される、
操作アシスト制御システム。
【請求項8】
請求項7に記載の操作アシスト制御システムであって、
前記自動操作対象操作部の前記マニュアル操作での操作が止められた場合、前記コントローラは、前記自動操作の前記無効を維持し、前記操作対象は、前記自動操作対象操作部の操作に応じて停止させられる、
操作アシスト制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の操作をアシストする操作アシスト制御システムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
例えば特許文献1に記載のように、作業機械では、走行の操作、および、アタッチメント(同文献では作業装置)の操作が行われる(同文献の要約などを参照)。
【先行技術文献】
【特許文献】
【0003】
特開2020-026670号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業者が、走行の操作、および、アタッチメントの操作を行うことは、作業者の操作の難易度が高く、操作の負担が大きい。また、作業機械の振動により、操作部(レバー、ペダルなど)が揺れると、操作部の揺れが作業機械の動きに影響を与えるおそれがある。そのため、作業機械を安定的に運転することが難しい。
【0005】
そこで、本発明は、作業者の操作の難易度および負担を軽減することができ、かつ、作業機械を安定的に運転することができる、操作アシスト制御システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
操作アシスト制御システムは、走行可能な走行体と、アタッチメントと、操作部と、コントローラと、を備える。前記アタッチメントは、前記走行体に対して動き、作業を行う。前記操作部は、走行操作およびアタッチメント操作を作業者が行うことが可能に構成される。前記走行操作は、前記走行体を走行させる操作である。前記アタッチメント操作は、前記走行体に対して前記アタッチメントを動かす操作である。前記走行操作および前記アタッチメント操作のうち一方の操作は、前記コントローラに設定された条件が満たされた場合に前記コントローラが自動的に行う自動操作である。前記走行操作および前記アタッチメント操作のうち前記一方の操作とは異なる操作は、作業者の操作によるマニュアル操作である。
【発明の効果】
【0007】
上記の構成により、作業者の操作の難易度および負担を軽減することができ、かつ、作業機械を安定的に運転することができる。
【図面の簡単な説明】
【0008】
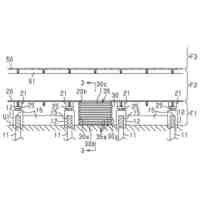
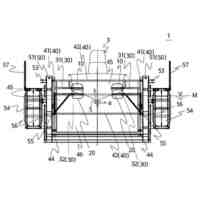
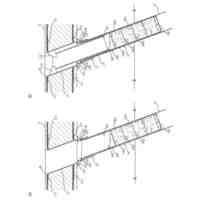
操作アシスト制御システム1の作業機械10などを横から見た図である。
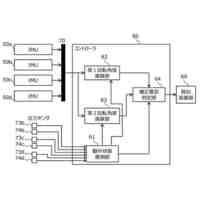
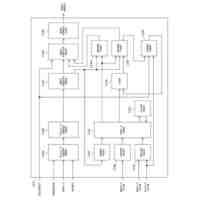
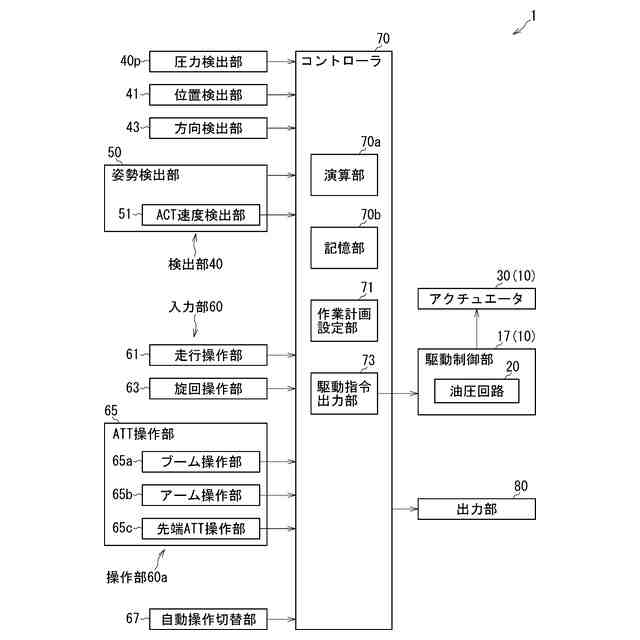
図1に示す操作アシスト制御システム1のブロック図である。
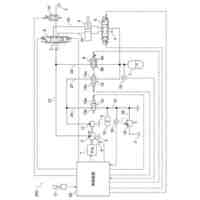
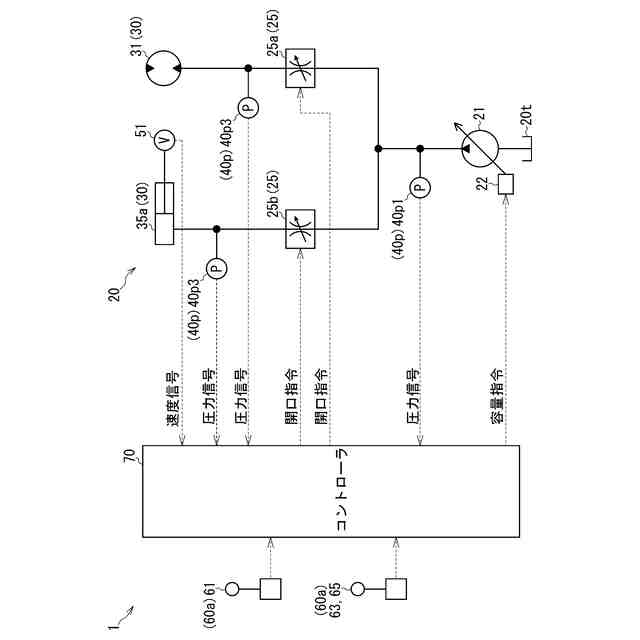
図2に示す油圧回路20などを示す図である。
図2に示す作業計画設定部71で設定される走行目標経路Rを示す図である。
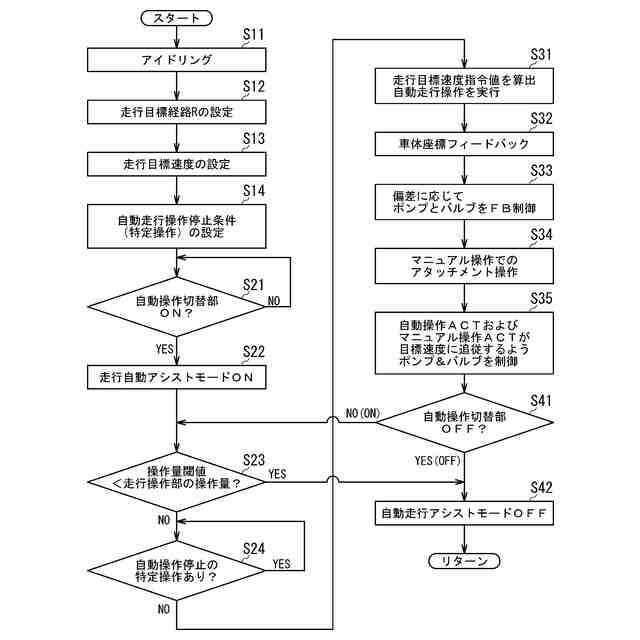
図1に示す操作アシスト制御システム1の作動のフローチャートである。
【発明を実施するための形態】
【0009】
図1~図5を参照して、操作アシスト制御システム1について説明する。
【0010】
操作アシスト制御システム1は、図1に示す作業機械10の操作をアシストするシステムである。操作アシスト制御システム1は、作業機械10と、図2に示すように、検出部40と、入力部60と、コントローラ70と、出力部80と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
コベルコ建機株式会社
作業補助システム
今日
個人
鋼管
22日前
FKS株式会社
擁壁
11日前
鈴健興業株式会社
敷板部材
7日前
株式会社クボタ
作業車
9日前
株式会社クボタ
作業車
9日前
株式会社奥村組
ケーソン工法
14日前
株式会社ネクステリア
平板基礎
7日前
個人
擁壁用ブロックおよび擁壁
8日前
株式会社大林組
建物の構造
8日前
株式会社奥村組
ケーソン刃口金物
14日前
株式会社熊谷組
地盤改良方法
3日前
株式会社大林組
袋体付き排水パイプ
21日前
株式会社大林組
袋体付き排水パイプ
21日前
株式会社熊谷組
山留壁用親杭
今日
株式会社熊谷組
密度計測方法
9日前
ヤマト発動機株式会社
浮遊型消波装置
11日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
建設機械
7日前
大和ハウス工業株式会社
杭抜き先端具
15日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
今日
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
29日前
ゼニヤ海洋サービス株式会社
通船ゲート
21日前
株式会社フジタ
掘削機
1か月前
ライト工業株式会社
鉄筋保持用治具
1日前
カナデビア株式会社
サクション基礎
1日前
鹿島建設株式会社
接続方法および接続構造
21日前
株式会社竹内製作所
作業用車両
今日
JFEスチール株式会社
鋼管矢板の継手構造
23日前
JFEスチール株式会社
鋼管矢板の継手構造
23日前
株式会社竹内製作所
作業用車両
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ