TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025148120
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048728
出願日
2024-03-25
発明の名称
マップ作成システム及び自動走行システム
出願人
Haloworld株式会社
,
鹿島建設株式会社
,
地方独立行政法人東京都立産業技術研究センター
代理人
弁理士法人後藤特許事務所
主分類
G09B
29/00 20060101AFI20250930BHJP(教育;暗号方法;表示;広告;シール)
要約
【課題】様々な高さの広域マップを容易に作成することができるマップ作成システムを提供する。
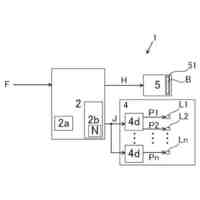
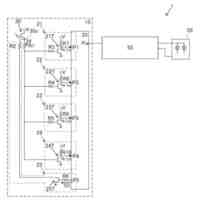
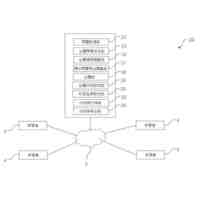
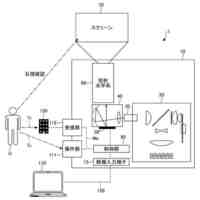
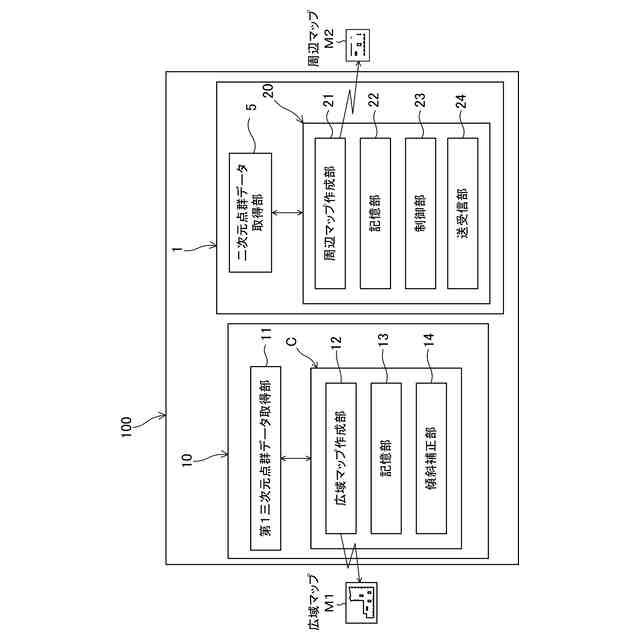
【解決手段】マップ作成システム10は、周囲を計測して三次元点群データD1を取得する第1三次元点群データ取得部11と、第1三次元点群データ取得部11によって取得された三次元点群データD1のうち、高さ方向における所定の範囲Hr内の三次元点群データD1aを水平方向の平面に投影して二次元の広域マップM1を作成する広域マップ作成部12と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
周囲を計測して三次元点群データを取得する第1三次元点群データ取得部と、
前記第1三次元点群データ取得部によって取得された三次元点群データのうち、高さ方向における所定の範囲内の三次元点群データを水平方向の平面に投影して二次元の広域マップを作成する広域マップ作成部と、を備えたマップ作成システム。
続きを表示(約 660 文字)
【請求項2】
目的地まで自動走行する自動走行体と、
請求項1に記載されたマップ作成システムによって得られた前記広域マップを記憶する記憶部と、
前記自動走行体に搭載され、前記自動走行体の周囲を計測して所定の水平面上の二次元点群データを取得する二次元点群データ取得部と、
前記記憶部に記憶された前記広域マップと前記二次元点群データ取得部によって取得された二次元点群データとに基づいて、前記自動走行体の走行動作を制御する制御部と、を備え、
前記広域マップ作成部は、前記二次元点群データ取得部によって計測する前記水平面を含む所定の範囲内の三次元点群データから前記広域マップを作成する自動走行システム。
【請求項3】
目的地まで自動走行する自動走行体と、
請求項1に記載されたマップ作成システムによって得られた前記広域マップを記憶する記憶部と、
前記自動走行体に搭載され、前記自動走行体の周囲を計測して三次元点群データを取得する第2三次元点群データ取得部と、
前記第2三次元点群データ取得部によって取得された三次元点群データのうち、高さ方向における所定の範囲内の三次元点群データを水平方向の平面に投影して前記自動走行体の周辺の二次元の周辺マップを作成する周辺マップ作成部と、
前記記憶部に記憶された前記広域マップと前記周辺マップ作成部によって作成した前記周辺マップとに基づいて、前記自動走行体の走行動作を制御する制御部と、を備えた自動走行システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、マップ作成システム及び自動走行システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、車輪を有する移動体が自律走行する移動体制御装置の発明が開示されている。
【0003】
特許文献1に記載された移動体制御装置では、移動体が自律走行する前に、走行エリア内を移動体を走行させて環境マップ(広域マップ)をSLAM(Simultaneous Localization and Mapping)技術に基づいて作成している。そして、移動体は、環境マップと移動体に搭載された二次元LiDAR(Light Detection And Ranging)によって認識した周囲の状況(二次元点群データ)とに基づいて自律走行する。
【先行技術文献】
【特許文献】
【0004】
特開2022-13243号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
二次元LiDARは、周囲の状況を二次元(平面)で認識する。特許文献1に記載された発明は、環境マップと二次元LiDARによって認識した周囲の状況とを比較するものであるため、二次元LiDARの測定位置に合わせた環境マップを予め用意する必要がある。
【0006】
ところで、特許文献1に記載されるような発明において、同じ空間において複数の移動体を走行させたいという要望がある。この場合に、移動体に搭載された二次元LiDARの設置位置(高さ)が移動体によって異なっていると、それぞれの移動体に搭載された二次元LiDARの設置位置(高さ)に合わせた環境マップ(広域マップ)が必要となる。この場合には、各移動体が自律走行する前に、それぞれの設置位置(高さ)に応じた環境マップ(広域マップ)を作成する必要があるため、過度の労力と時間を要する。
【0007】
本発明は、様々な高さの広域マップを容易に作成することができるマップ作成システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、周囲を計測して三次元点群データを取得する第1三次元点群データ取得部と、第1三次元点群データ取得部によって取得された三次元点群データのうち、高さ方向における所定の範囲内の三次元点群データを水平方向の平面に投影して二次元の広域マップを作成する広域マップ作成部と、を備える。
【発明の効果】
【0009】
本発明によれば、様々な高さの広域マップを容易に作成することができる。
【図面の簡単な説明】
【0010】
図1は、本発明の実施形態に係るマップ作成システム及び自動走行システムのブロック図である。
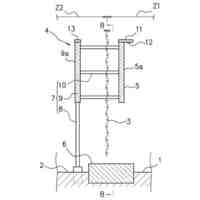
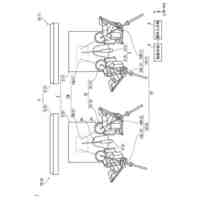
図2は、本発明の実施形態に係るマップ作成システムに係る台車の側面図である。
図3は、本発明の実施形態に係るマップ作成システムに係る台車の上面図である。
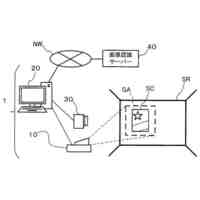
図4は、建設現場の所定の区画Rを示す図である。
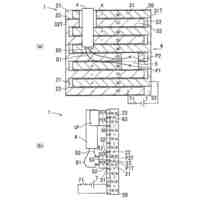
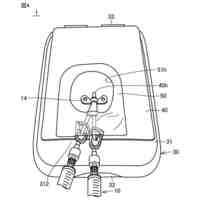
図5は、本発明の実施形態に係る自動走行体の側面図である。
図6は、本発明の実施形態に係る広域マップを作成するためのフローを示すフローチャートである。
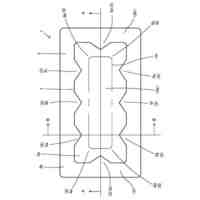
図7(A)は、三次元点群データを一平面で抽出した場合のデータの一部を示す図であり、図7(B)は、三次元点群データを所定の範囲で抽出して圧縮した場合のデータの一部を示す図である。
図8は、本発明の実施形態に係る自動走行体を自動走行させるときのフローを示すフローチャートである。
図9は、変形例に係る自動走行体の側面図、及び計測した三次元点群データの抽出範囲を説明するための図である。
図10は、変形例に係る広域マップを作成するためのフローを示すフローチャートである。
図11は、変形例に係る自動走行体を自動走行させるときのフローを示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
教育のAI化
1か月前
個人
英語教材
1か月前
個人
回転式カード学習具
3か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
1か月前
個人
計算用教具
2か月前
中国電力株式会社
標示旗
2か月前
日本精機株式会社
車両用表示装置
1か月前
個人
インフィニティミラー
1か月前
個人
微細構造を模した理科学習教材
1か月前
個人
モデルで薔薇の花嫁様を描く為
3か月前
日本精機株式会社
車両用センサ装置
2か月前
日榮新化株式会社
対象物質感知シート
1か月前
ニチレイマグネット株式会社
サイン器具
1か月前
シャープ株式会社
表示装置
2か月前
株式会社一弘社
情報表示板
3か月前
株式会社ウメラボ
学習支援システム
2か月前
株式会社ウメラボ
学習支援システム
2か月前
日本精機株式会社
表示装置及びその製造方法
1か月前
ニチレイマグネット株式会社
磁着式電飾装置
2か月前
朝日インテック株式会社
ラベルシート
1か月前
株式会社リコー
画像投射システム
2か月前
株式会社イリオスNOTO
シート保管具
1か月前
朝日インテック株式会社
生体モデル装置
1か月前
シャープ株式会社
表示装置
1か月前
リンテック株式会社
表示体
2か月前
学校法人関西医科大学
腹腔鏡手術訓練装置
2か月前
シチズンファインデバイス株式会社
液晶表示装置
3か月前
国立大学法人秋田大学
運転シミュレータ
1か月前
ローム株式会社
半導体装置およびシステム
19日前
セイコーエプソン株式会社
表示方法
3か月前
セイコーエプソン株式会社
表示方法
3か月前
リンテック株式会社
粘着ラベル
2か月前
ニプロ株式会社
シミュレータ
3か月前
TOPPANホールディングス株式会社
ラベル
2か月前
キヤノン株式会社
発光装置
2か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ