TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142615
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042067
出願日
2024-03-18
発明の名称
車両制御装置及びセンサデータ処理方法
出願人
Astemo株式会社
代理人
弁理士法人信友国際特許事務所
主分類
G06F
9/48 20060101AFI20250924BHJP(計算;計数)
要約
【課題】システム全体として余裕時間が残されている場合においての遅延の吸収を可能にする。
【解決手段】一の半導体チップ12における先行タスクの処理と、当該先行タスクの処理結果を利用する他の半導体チップ11における後続タスクの処理と、を少なくとも含む処理シーケンスに対し、当該処理シーケンスに含まれる各タスクの処理に要する基準時間及び余裕時間を含む処理周期が割り当てられている。他の半導体チップ11のプロセッサは、一の半導体チップ12における先行タスクの処理に要した実行時間及び余裕時間に基づいて、処理周期における後続タスクの処理に使用可能な残時間を求め、残時間に基づいて、後続タスクの開始時間又は処理内容の少なくとも一方を決定する。
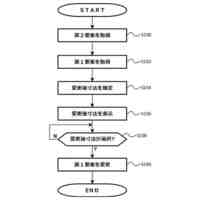
【選択図】図7
特許請求の範囲
【請求項1】
センサから受信したセンサデータを処理するプロセッサと、不揮発性メモリと、揮発性メモリと、を有する半導体チップを複数備えた車両制御装置であって、
一の半導体チップにおける先行タスクの処理と、当該先行タスクの処理結果を利用する他の半導体チップにおける後続タスクの処理と、を少なくとも含む処理シーケンスに対し、当該処理シーケンスに含まれる各タスクの処理に要する基準時間及び余裕時間を含む処理周期が割り当てられており、
前記他の半導体チップのプロセッサは、
前記一の半導体チップにおける前記先行タスクの処理に要した実行時間及び前記余裕時間に基づいて、前記処理周期における前記後続タスクの処理に使用可能な残時間を求め、前記残時間に基づいて、前記後続タスクの開始時間又は処理内容の少なくとも一方を決定する、
車両制御装置。
続きを表示(約 1,700 文字)
【請求項2】
前記他の半導体チップのプロセッサは、
前記一の半導体チップにおける前記先行タスクの処理時間が前記基準時間を超過すると、前記余裕時間に対して設定した閾値の時間内で前記先行タスクの処理が完了するまで前記後続タスクの開始を保留する、
請求項1に記載の車両制御装置。
【請求項3】
前記他の半導体チップのプロセッサは、
前記後続タスクの開始を保留した場合に、前記閾値の時間内で前記先行タスクの処理が完了しないときには、前記先行タスクの処理結果を利用するプログラムの開始要求を無効化する、
請求項2に記載の車両制御装置。
【請求項4】
前記他の半導体チップの不揮発性メモリは、
前記一の半導体チップにおける先行タスクの処理結果を利用する第一のプログラムと、
前記一の半導体チップにおける先行タスクの処理結果を利用しない第二のプログラムと、を記憶し、
前記他の半導体チップのプロセッサは、
前記閾値の時間内に前記先行タスクの処理が完了した場合には、第一のプログラムを選択し、前記閾値の時間内に前記先行タスクの処理が完了しない場合には、第二のプログラムを選択する、
請求項2に記載の車両制御装置。
【請求項5】
複数の前記半導体チップは、
前記センサから受信したセンサデータに基づいて、物体を検知する物体検知処理を実行し、
前記第一のプログラムは、
前記他の半導体チップのプロセッサに、前記先行タスクの処理結果である物体検知結果と当該他の半導体チップにおけるタスクの処理結果である物体検知結果とを統合して、第一の統合物体情報を生成する第一のフュージョン処理を前記後続タスクとして実行させ、
前記第二のプログラムは、
前記他の半導体チップのプロセッサに、当該他の半導体チップにおけるタスクの処理結果である物体検知結果を用いて、第二の統合物体情報を生成する第二のフュージョン処理を前記後続タスクとして実行させる、
請求項4に記載の車両制御装置。
【請求項6】
前記他の半導体チップのプロセッサは、
前記一の半導体チップにおける前記先行タスクの処理時間が、前記基準時間に前記閾値の時間を加えた時間を超えると判断した場合、前記後続タスクをより基準時間が短い処理内容で実行する
請求項2に記載の車両制御装置。
【請求項7】
前記一の半導体チップのプロセッサは、
前記一の半導体チップにおける複数のタスクのうち一のタスクの処理時間が、前記基準時間に前記閾値の時間を加えた時間を超えると判断した場合、前記一の半導体チップにおける前記一のタスクの後に実行されるタスクをより基準時間が短い処理内容で実行する
請求項2に記載の車両制御装置。
【請求項8】
前記他の半導体チップのプロセッサは、
前記他の半導体チップにおける複数のタスクのうち一のタスクの処理時間が、前記基準時間に前記閾値の時間を加えた時間を超えると判断した場合、前記他の半導体チップにおける前記一のタスクの後に実行されるタスクをより基準時間が短い処理内容で実行する
請求項2に記載の車両制御装置。
【請求項9】
前記他の半導体チップの揮発性メモリは、
前記一の半導体チップにおける前記先行タスクの処理結果及び当該先行タスクの処理時間を示すタイムスタンプを記憶し、
前記他の半導体チップのプロセッサは、
前記揮発性メモリに記憶された前記タイムスタンプの更新状況に応じて、前記後続タスクの開始時間又は処理内容の少なくとも一方を決定する、
請求項1に記載の車両制御装置。
【請求項10】
前記他の半導体チップのプロセッサは、
前記余裕時間に対して、絶対時刻に対する前記他の半導体チップ及び前記一の半導体チップの時刻同期誤差に応じた時間を減算し、前記処理周期における前記後続タスクの処理に使用可能な前記残時間を求める
請求項1に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、センサの検知結果を用いる車両制御装置及びセンサデータ処理方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
複数の機器で構成される車両制御装置において、処理順序を切り替えることにより遅延を吸収する既存技術として、特許文献1に記載の技術がある。特許文献1には、並列に実行可能な複数のタスクにおいて、それらのタスクの結果をそれぞれ使用する後続タスクをイベント駆動とし、イベント受信時刻からデッドラインまでの残り時間を計算することで、デッドラインを満たしながら処理順序を入れ替えることで、片方のタスクの遅延を吸収する方法が記載されている。
【0003】
特許文献1に記載の方法によれば、第一のECUからの出力の遅延時に、第二のECUの処理結果のみを使用する処理を先行して実行し、次に第一のECUからの処理結果を使用する処理を実行することで第一のECUに発生した遅延を吸収できる。
【先行技術文献】
【特許文献】
【0004】
特開2023-36264号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の技術は、第二のECUの処理結果を利用する処理の実行が完了した時点で、第一のECUの処理結果を利用する処理を実行する。このため、システム全体として余裕時間が残されている場合においての遅延の吸収が課題となる。
【0006】
本発明は、上記の状況に鑑みてなされたものであり、システム全体としての余裕時間を考慮して遅延を吸収することができる車両制御装置及びセンサデータ処理方法を提案することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の一態様の車両制御装置は、センサから受信したセンサデータを処理するプロセッサと、不揮発性メモリと、揮発性メモリと、を有する半導体チップを複数備えた車両制御装置であって、一の半導体チップにおける先行タスクの処理と、当該先行タスクの処理結果を利用する他の半導体チップにおける後続タスクの処理と、を少なくとも含む処理シーケンスに対し、当該処理シーケンスに含まれる各タスクの処理に要する基準時間及び余裕時間を含む処理周期が割り当てられており、他の半導体チップのプロセッサは、一の半導体チップにおける先行タスクの処理に要した実行時間及び余裕時間に基づいて、処理周期における後続タスクの処理に使用可能な残時間を求め、残時間に基づいて、後続タスクの開始時間又は処理内容の少なくとも一方を決定する。
【発明の効果】
【0008】
本発明の少なくとも一態様によれば、システム全体としての余裕時間を考慮して遅延を吸収することができる。
上記した以外の課題、構成及び効果は、以下の発明を実施するための形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
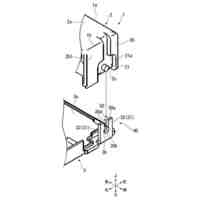
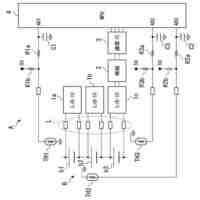
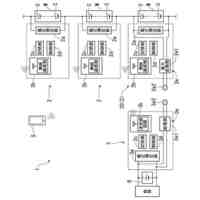
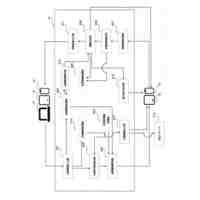
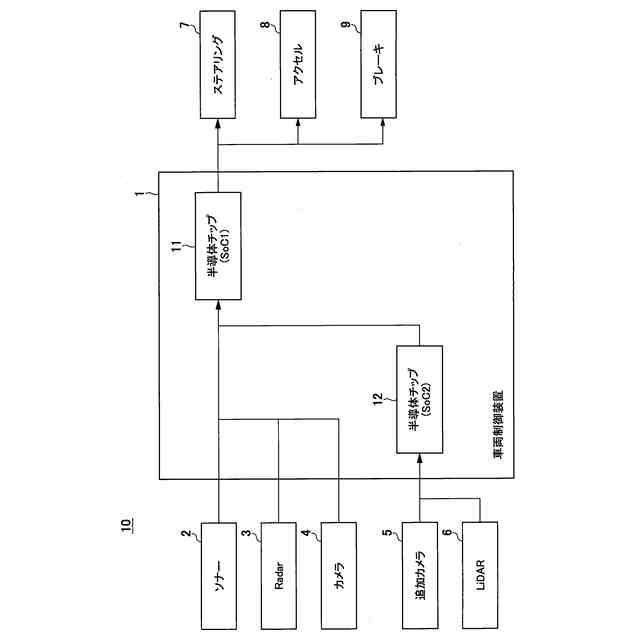
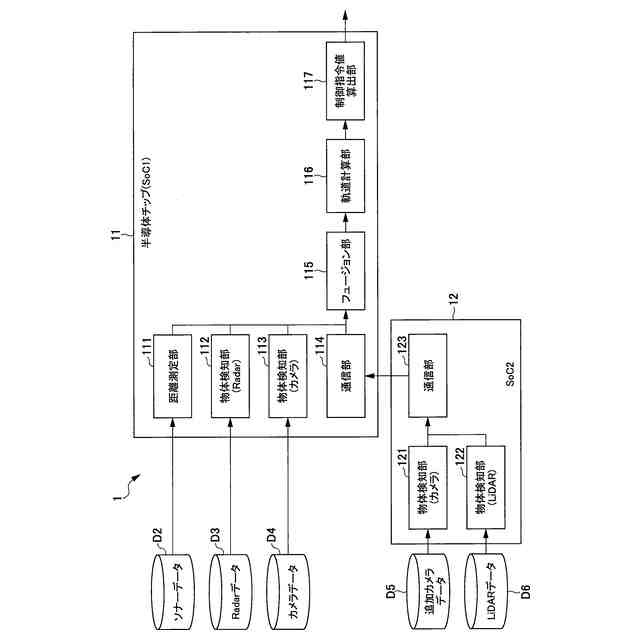
本発明の第1の実施形態に係る車両制御装置の構成例を示した図である。
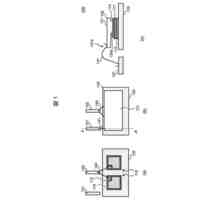
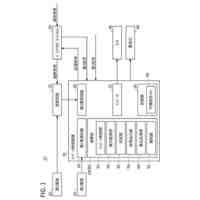
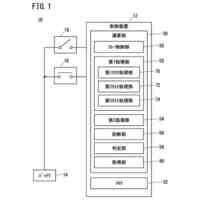
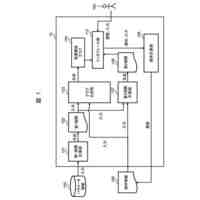
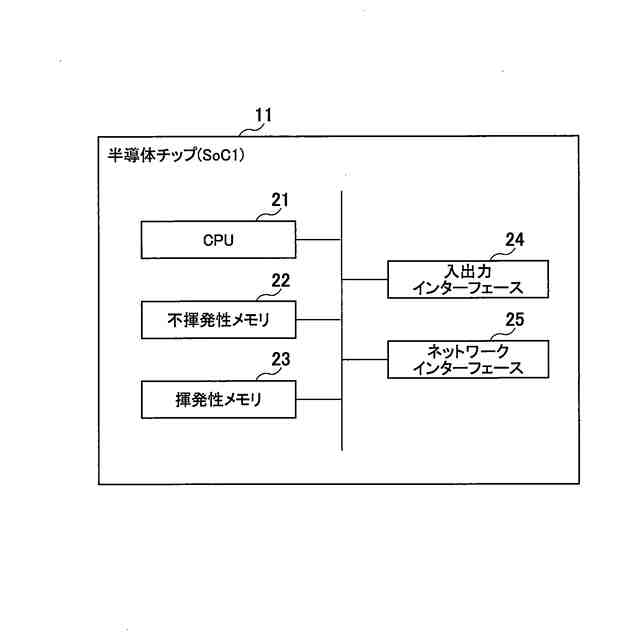
本発明の第1の実施形態に係る半導体チップが備えるコンピューターのハードウェア構成例を示すブロック図である。
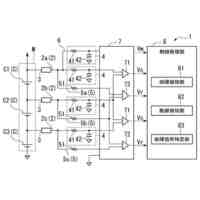
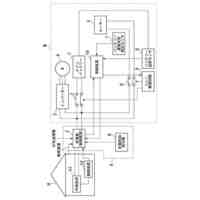
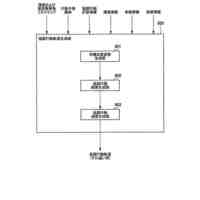
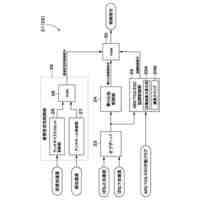
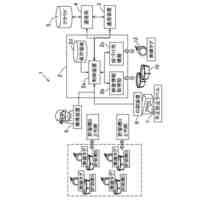
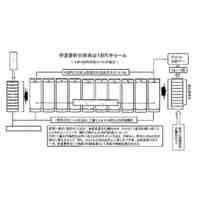
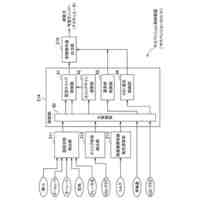
本発明の第1の実施形態に係る車両制御装置の機能ブロックの構成及び全体動作の流れの例を示した図である。
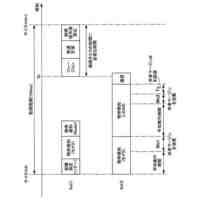
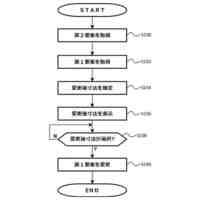
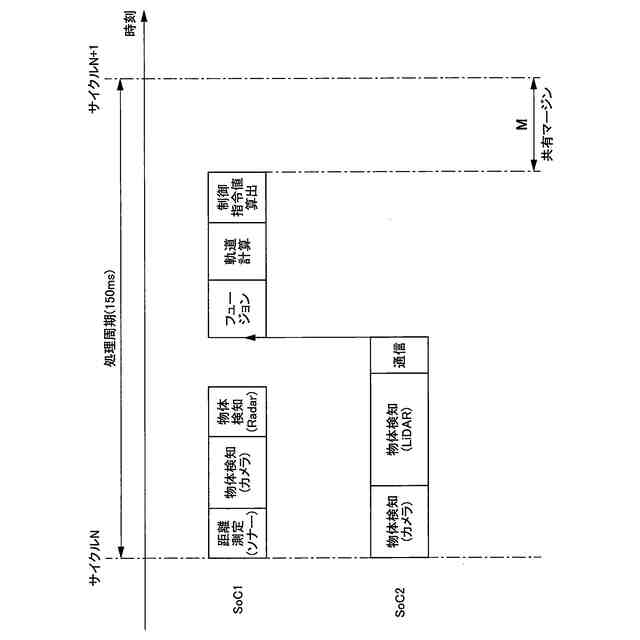
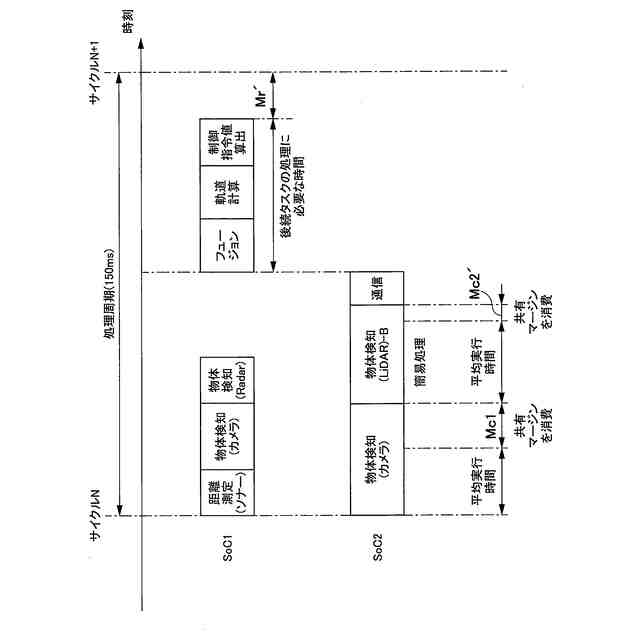
本発明の第1の実施形態に係る車両制御装置の各半導体チップにおける機能の動作例を示した図である。
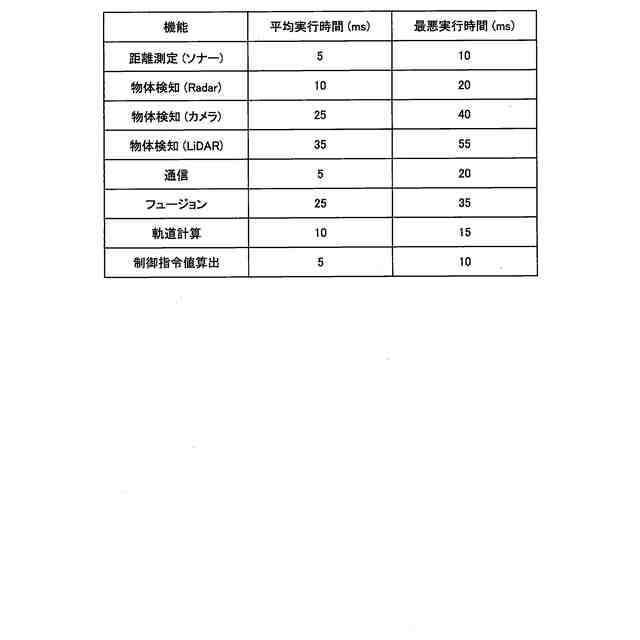
各機能の平均実行時間と最悪実行時間の例を示した図である。
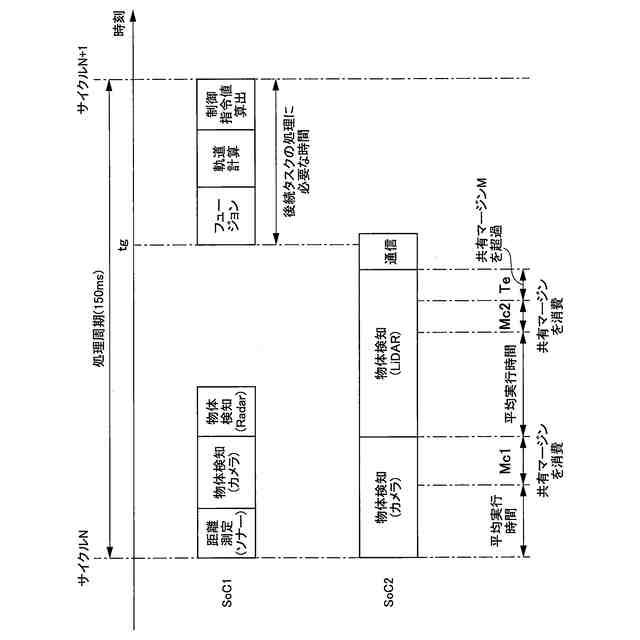
タスクの実行が遅延した際の共有マージンを使用した一般的な動作例を示した図である。
本発明の第1の実施形態においてデッドラインを守るために先行タスクの結果を使用しない例を示した図である。
本発明の第2の実施形態に係る先行タスクの処理を実行する半導体チップにおいて残り時間を考慮した機能の選択の例を示した図である。
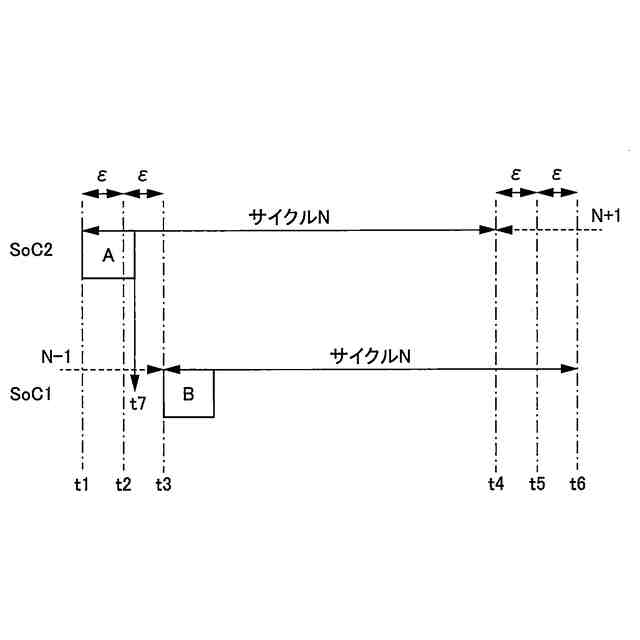
本発明の第3の実施形態に係る半導体チップ間の時刻同期誤差の第1の例を示した図である。
(追加)本発明の第3の実施形態に係る半導体チップ間の時刻同期誤差の第2の例を示した図である。
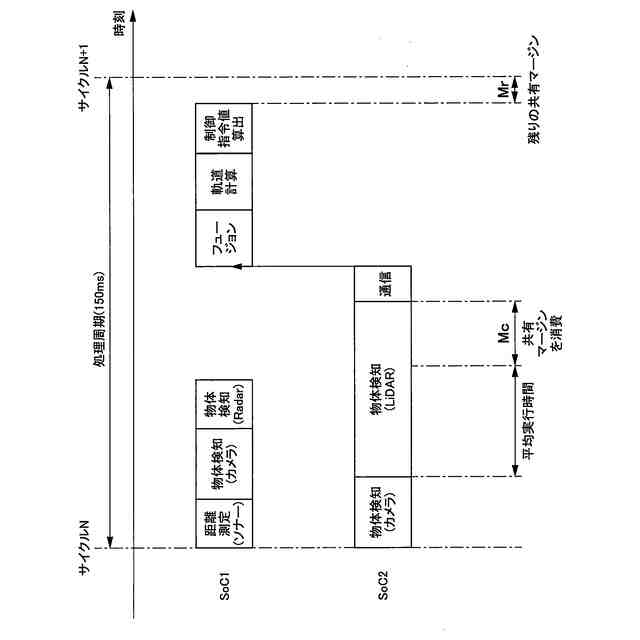
本発明の第4の実施形態において後続の処理に共有マージンを按分する例を示した図である
本発明の第4の実施形態において先行する処理が時間内に実行を完了した場合の例を示した図である。
【発明を実施するための形態】
【0010】
以下、添付図面を参照して、本発明を実施するための形態(以下、「実施形態」と称する)の例について説明する。
本明細書及び添付図面において、同一の構成要素又は類似の構成要素には同一の符号を付与し、重複する説明を省略する、又は差分を中心とした説明のみを行う場合がある。また、同一又は類似の構成要素が複数ある場合には、同一の符号に異なる添字を付して説明する場合がある。なお、これらの複数の構成要素を区別する必要がない場合には、添字を省略して説明することもある。各構成要素の数は、特に断りがない限り単数でも複数でもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
Astemo株式会社
樹脂筐体
今日
Astemo株式会社
半導体装置
6日前
Astemo株式会社
電池監視装置
今日
Astemo株式会社
電動駆動装置
今日
Astemo株式会社
電流検出装置
2日前
Astemo株式会社
電圧検出装置
2日前
Astemo株式会社
緩衝装置、懸架装置
今日
Astemo株式会社
インバータ制御装置
12日前
Astemo株式会社
バッテリー充電装置
2日前
Astemo株式会社
支持ユニット、懸架装置
2日前
Astemo株式会社
バンプストッパ、緩衝器
2日前
Astemo株式会社
インジェクタ故障検出装置
2日前
Astemo株式会社
制御装置及び鍵情報秘匿方法
2日前
Astemo株式会社
地絡検出装置及び地絡検出方法
6日前
Astemo株式会社
タスク処理方法および制御装置
2日前
Astemo株式会社
車両制御装置及び車両制御方法
6日前
Astemo株式会社
めっき部材およびその製造方法
13日前
Astemo株式会社
電池監視装置及び電池管理システム
今日
Astemo株式会社
車両制御装置及びセンサデータ処理方法
今日
Astemo株式会社
自動車用電子制御装置およびメモリ管理装置
2日前
Astemo株式会社
サーバ装置
12日前
Astemo株式会社
走行支援装置
12日前
Astemo株式会社
車両制御システム
1日前
Astemo株式会社
改善システム、改善方法
6日前
Astemo株式会社
サスペンション制御装置、サスペンション制御方法、およびサスペンション制御プログラム
今日
個人
裁判のAI化
2か月前
個人
フラワーコートA
1か月前
個人
工程設計支援装置
1か月前
個人
地球保全システム
今日
個人
情報処理システム
2か月前
個人
検査システム
2か月前
個人
介護情報提供システム
2か月前
個人
冷凍食品輸出支援構造
27日前
個人
為替ポイント伊達夢貯
27日前
個人
設計支援システム
2か月前
個人
設計支援システム
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ