TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142370
公報種別
公開特許公報(A)
公開日
2025-09-30
出願番号
2025128843,2021203324
出願日
2025-07-31,2021-12-15
発明の名称
車両制御システム
出願人
Astemo株式会社
代理人
弁理士法人広和特許事務所
主分類
B60G
17/015 20060101AFI20250919BHJP(車両一般)
要約
【課題】 接地荷重変動を小さくして、車両の安定性を高めることができる車両制御システムおよび車両制御装置を提供する。
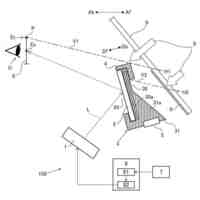
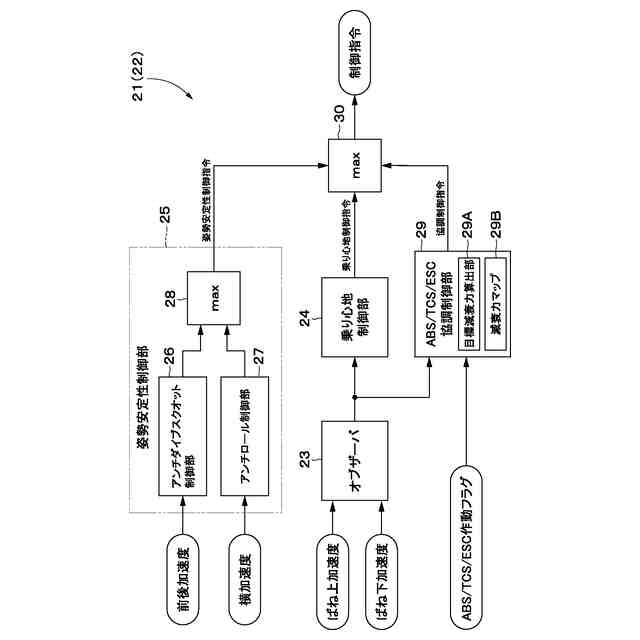
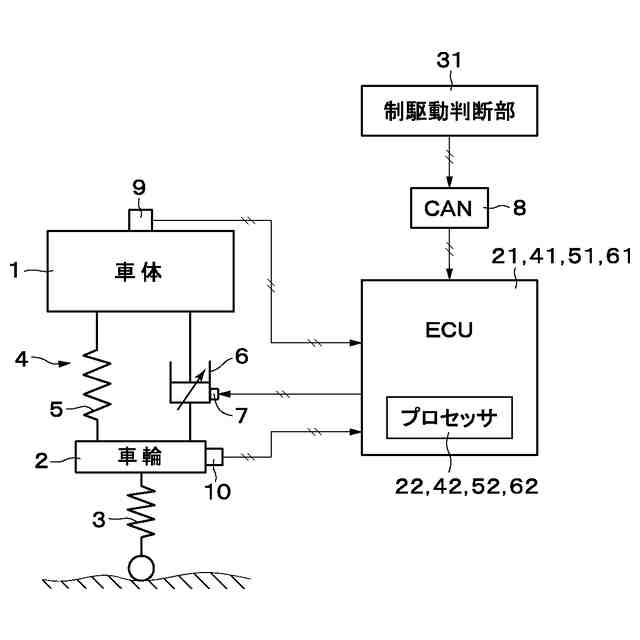
【解決手段】 車両制御システムは、車両の車体1と4つの車輪2との間にそれぞれ設けられ、発生力がソフトとハードの間で調整可能な複数の可変ダンパ6と、可変ダンパ6の発生力を可変に制御するECU21と、を備えている。ECU21は、4つの車輪2を独立に制駆動する制駆動判断部31からの信号が入力されたとき、可変ダンパ6による路面への接地荷重変動が小さくなるよう、可変ダンパ6の発生力を調整する。
【選択図】 図3
特許請求の範囲
【請求項1】
車両の車体と4つの車輪との間にそれぞれ設けられ、発生力がソフトとハードの間で調整可能な複数の力発生機構と、該力発生機構の発生力を可変に制御する制御手段と、を備え、
前記制御手段は、
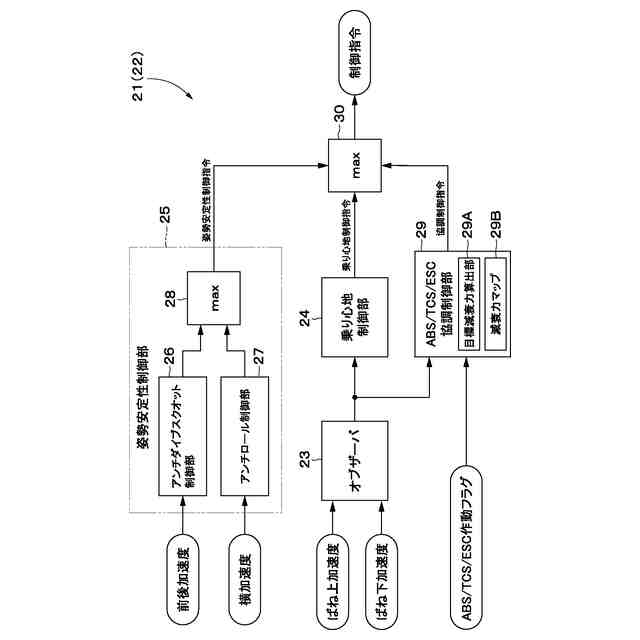
入力された前記車両の姿勢変化に応じて、前記力発生機構を制御するための姿勢安定性制御指令値を出力する姿勢安定性制御部と、
入力された前記車両のばね上振動に応じて、前記力発生機構を制御するための乗り心地制御指令値を出力する乗り心地制御部と、
4つの前記車輪を独立に制駆動する制駆動判断部からの信号が入力されたとき、前記力発生機構を制御するための協調制御指令値を出力する協調制御指令部と、
前記姿勢安定性制御指令値と前記乗り心地制御指令値と前記協調制御指令値とから出力された指令値のうち最も高い指令値を選択する制御指令選択部と、
を備え、前記制御指令選択部からの前記指令値に基づいて前記力発生機構の前記発生力を調整する車両制御システム。
続きを表示(約 1,000 文字)
【請求項2】
前記制御手段は、前記制駆動判断部からの信号と前記車体と前記車輪との間の相対加速度の信号とに基づいてばね下の振動を抑制するためのばね下制振制御指令を出力するばね下制振制御部を備え、
前記ばね下制振制御部は、4つの前記車輪を独立に制駆動する前記制駆動判断部からの信号が入力されたとき、前記力発生機構による路面への接地荷重変動が小さくなるよう、前記協調制御指令値を出力する請求項1に記載の車両制御システム。
【請求項3】
前記制御手段は、前記制駆動判断部からの信号が入力されたとき、前記協調制御指令値を優先させて、前記力発生機構の前記発生力を制御する請求項2に記載の車両制御システム。
【請求項4】
車両の車体と4つの車輪との間にそれぞれ設けられ、前記車体と前記車輪との間の発生する力を可変するアクチュエータを制御する車両制御装置であって、
前記車両制御装置は、
入力された前記車両の姿勢変化に応じて、前記アクチュエータを制御するための姿勢安定性制御指令値を出力する姿勢安定性制御部と、
入力された前記車両のばね上振動に応じて、前記アクチュエータを制御するための乗り心地制御指令値を出力する乗り心地制御部と、
4つの前記車輪を独立に制駆動する制駆動判断部からの信号が入力されたとき、前記アクチュエータの発生力を制御するための協調制御指令値を出力する協調制御指令部と、
前記姿勢安定性制御指令値と前記乗り心地制御指令値と前記協調制御指令値とから出力された指令値のうち最も高い指令値を選択する制御指令選択部と、
を備え、前記制御指令選択部からの前記指令値に基づいて前記アクチュエータを制御する車両制御装置。
【請求項5】
前記車両制御装置は、前記制駆動判断部からの信号と前記車体と前記車輪との間の相対加速度の信号とに基づいてばね下の振動を抑制するためのばね下制振制御指令を出力するばね下制振制御部を備え、
前記ばね下制振制御部は、4つの前記車輪を独立に制駆動する前記制駆動判断部からの信号が入力されたとき、前記アクチュエータの発生力による前記車輪と路面間の接地荷重変動が小さくなるよう、前記協調制御指令値を出力する請求項4に記載の車両制御装置。
【請求項6】
前記車両制御装置は、前記制駆動判断部からの信号が入力されたとき、前記協調制御指令値を優先させて、前記アクチュエータを制御する請求項5に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車体と車輪間の相対変位を抑制する力を可変するアクチュエータを制御する車両制御システムおよび車両制御装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1に開示された制御装置は、輪荷重を増加させる車輪側に設けられたダンパの減衰力特性を、縮み行程中の初期をハード側とし後期をソフト側に切替える縮み行程ハード・ソフト切替制御と、伸び行程中の初期をソフト側とし後期をハード側に切替える伸び行程ソフト・ハード切替制御とのいずれかを実行する。これにより、輪荷重増減の応答性と絶対量を制御することができ、車両をより安全に運転制御することができる。
【先行技術文献】
【特許文献】
【0003】
特開2012-66677号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1に開示された制御装置では、縮み行程ハード・ソフト切替制御と伸び行程ソフト・ハード切替制御とのいずれかを実行する。しかしながら、このような制御を行うと、接地荷重変動が大きくなる傾向があり、例えばABS(Anti-lock Breake System)などの作動時に、車両の安定性が低下する虞れがある。
【0005】
本発明の一実施形態の目的は、接地荷重変動を小さくして、車両の安定性を高めることができる車両制御システムおよび車両制御装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明の一実施形態による車両制御システムは、車両の車体と4つの車輪との間にそれぞれ設けられ、発生力がソフトとハードの間で調整可能な複数の力発生機構と、該力発生機構の発生力を可変に制御する制御手段と、を備え、前記制御手段は、入力された前記車両の姿勢変化に応じて、前記力発生機構を制御するための姿勢安定性制御指令値を出力する姿勢安定性制御部と、入力された前記車両のばね上振動に応じて、前記力発生機構を制御するための乗り心地制御指令値を出力する乗り心地制御部と、4つの前記車輪を独立に制駆動する制駆動判断部からの信号が入力されたとき、前記力発生機構を制御するための協調制御指令値を出力する協調制御指令部と、前記姿勢安定性制御指令値と前記乗り心地制御指令値と前記協調制御指令値とから出力された指令値のうち最も高い指令値を選択する制御指令選択部と、を備え、前記制御指令選択部からの前記指令値に基づいて前記力発生機構の前記発生力を調整することを特徴としている。
【0007】
本発明の一実施形態による車両制御装置は、車両の車体と4つの車輪との間にそれぞれ設けられ、前記車体と前記車輪との間の発生する力を可変するアクチュエータを制御する車両制御装置であって、前記車両制御装置は、入力された前記車両の姿勢変化に応じて、前記アクチュエータを制御するための姿勢安定性制御指令値を出力する姿勢安定性制御部と、入力された前記車両のばね上振動に応じて、前記アクチュエータを制御するための乗り心地制御指令値を出力する乗り心地制御部と、4つの前記車輪を独立に制駆動する制駆動判断部からの信号が入力されたとき、前記アクチュエータの発生力を制御するための協調制御指令値を出力する協調制御指令部と、前記姿勢安定性制御指令値と前記乗り心地制御指令値と前記協調制御指令値とから出力された指令値のうち最も高い指令値を選択する制御指令選択部と、を備え、前記制御指令選択部からの前記指令値に基づいて前記アクチュエータを制御することを特徴としている。
【発明の効果】
【0008】
本発明の一実施形態によれば、接地荷重変動を小さくして、車両の安定性を高めることができる。
【図面の簡単な説明】
【0009】
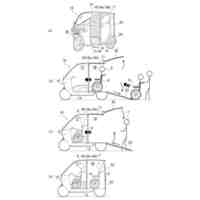
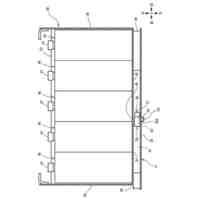
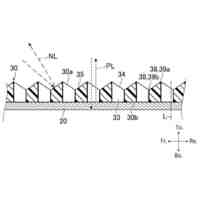
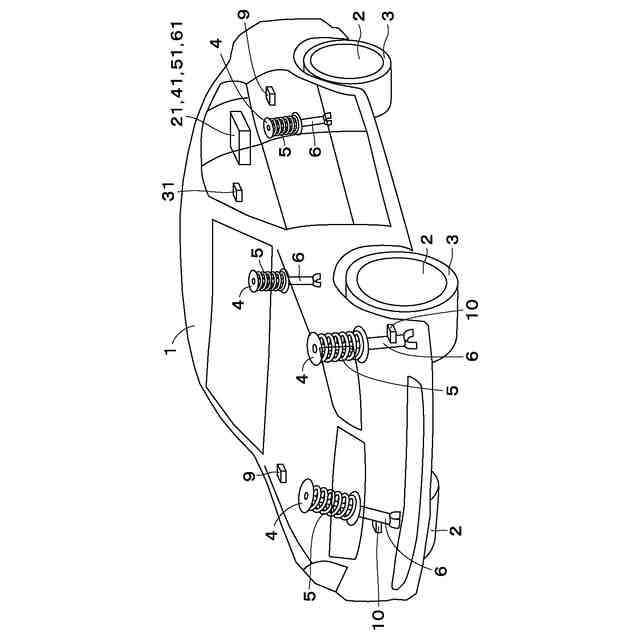
本発明の実施形態によるECUが適用された4輪自動車を示す全体構成図である。
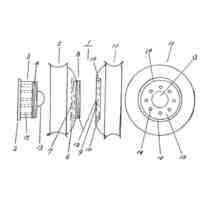
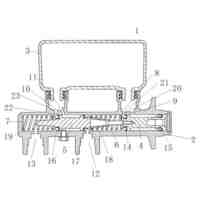
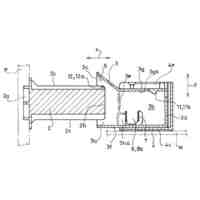
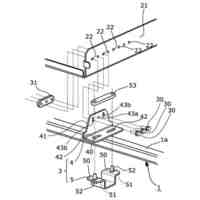
図1中の自動車に搭載した緩衝器を模式的に示す図である。
第1の実施形態のECUの構成を示すブロック図である。
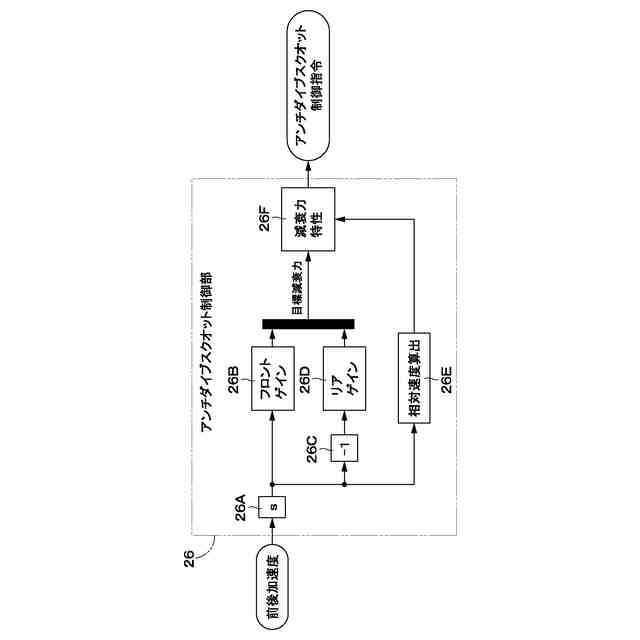
図3中のアンチダイブスクオット制御部の構成を示すブロック図である。
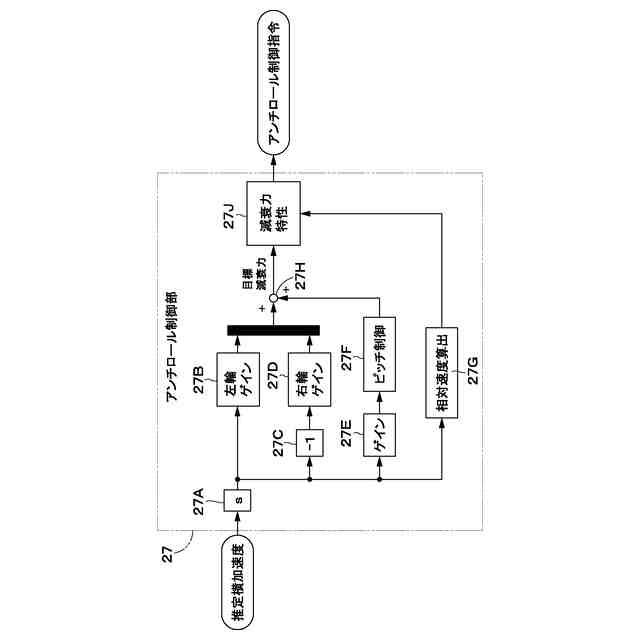
図3中のアンチロール制御部の構成を示すブロック図である。
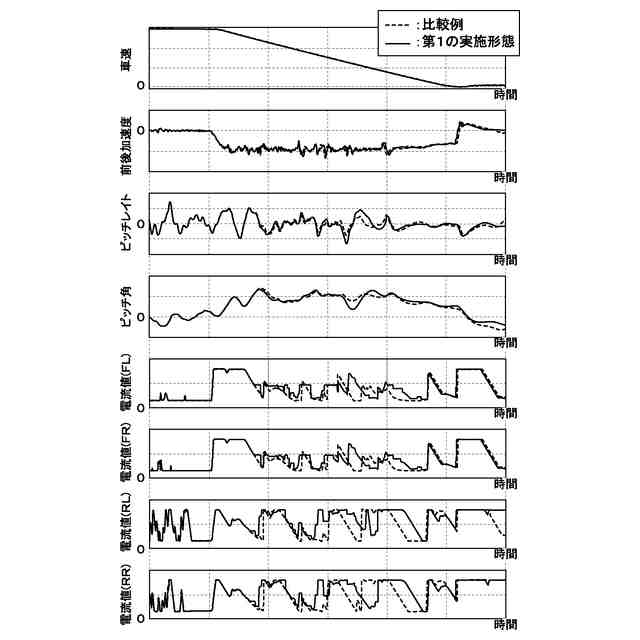
第1の実施形態および比較例について、車速、前後加速度、ピッチレイト、ピッチ角、各車輪の可変ダンパに供給される電流値の時間変化を示す特性線図である。
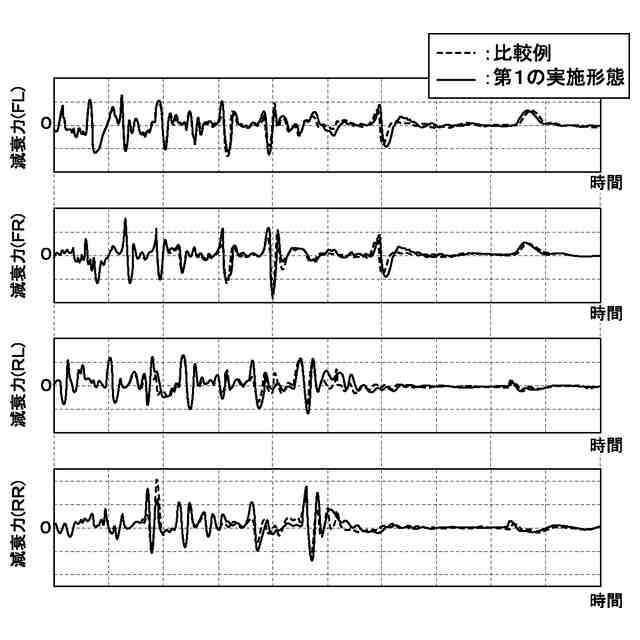
第1の実施形態および比較例について、各車輪の可変ダンパが発生する減衰力の時間変化を示す特性線図である。
第1の実施形態および比較例について、各車輪の輪荷重の時間変化を示す特性線図である。
第2の実施形態のECUの構成を示すブロック図である。
左前輪の可変ダンパに供給される電流値と輪荷重変動RMS値との関係を示す説明図である。
左後輪の可変ダンパに供給される電流値と輪荷重変動RMS値との関係を示す説明図である。
左前輪の可変ダンパのピストン速度と減衰力との関係を示す特性線図である。
左後輪の可変ダンパのピストン速度と減衰力との関係を示す特性線図である。
第3の実施形態のECUの構成を示すブロック図である。
ばね上とばね下との間の相対加速度に基づく状態遷移を模式的に示す図である。
相対加速度、状態、指令値の時間変化を示す特性線図である。
第4の実施形態のECUの構成を示すブロック図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態による車両制御システムおよび車両制御装置を、例えば4輪自動車に適用した場合を例に挙げ、添付図面に従って詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カーテント
4か月前
個人
タイヤレバー
2か月前
個人
前輪キャスター
1か月前
個人
ルーフ付きトライク
1か月前
個人
車輪清掃装置
4か月前
個人
タイヤ脱落防止構造
1か月前
個人
ホイルのボルト締結
3か月前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
3か月前
個人
車両通過構造物
2か月前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
表示装置
2か月前
個人
マスタシリンダ
5日前
日本精機株式会社
表示装置
2か月前
井関農機株式会社
作業車両
3か月前
個人
キャンピングトライク
3か月前
個人
アクセルのソフトウェア
3か月前
個人
車両用スリップ防止装置
3か月前
個人
キャンピングトレーラー
3か月前
個人
乗合路線バスの客室装置
2か月前
株式会社ニフコ
照明装置
1か月前
個人
円湾曲ホイール及び球体輪
2か月前
株式会社ニフコ
収納装置
22日前
個人
音声ガイド、音声サービス
2か月前
株式会社ニフコ
保持装置
3か月前
個人
車載小物入れ兼雨傘収納具
3か月前
日本精機株式会社
車載表示装置
13日前
日本精機株式会社
車載表示装置
3か月前
株式会社豊田自動織機
産業車両
1か月前
日本精機株式会社
車室演出装置
1か月前
トヨタ自動車株式会社
車両
3か月前
日本無線株式会社
取付金具
2か月前
日本精機株式会社
車両用投影装置
3か月前
日本精機株式会社
車両用表示装置
1か月前
日本精機株式会社
車両用投影装置
3か月前
井関農機株式会社
作業車両
3か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ