TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142463
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024041824
出願日
2024-03-18
発明の名称
サスペンション制御装置、サスペンション制御方法、およびサスペンション制御プログラム
出願人
Astemo株式会社
代理人
個人
主分類
B60G
17/015 20060101AFI20250924BHJP(車両一般)
要約
【課題】車両の旋回中にスリップを検知した場合、外輪側前輪にかかる接地荷重が相対的に小さくなることを回避してアンダーステアを抑制する。
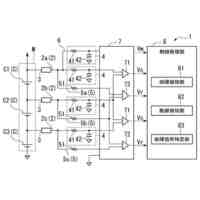
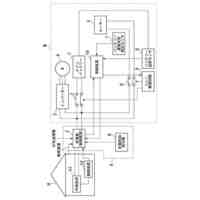
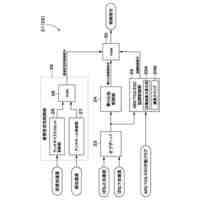
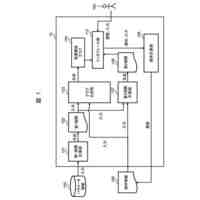
【解決手段】車両のサスペンション装置に制御指令値を出力して減衰力可変ダンパーの減衰力を制御するサスペンション制御装置であって、車両の旋回状態を検出する旋回状態検出部211と、車両のスリップ状態を検出するスリップ状態検出部212と、車両が接地している路面の路面摩擦係数μを推定する路面摩擦係数推定演算部213と、旋回状態検出部で車両が旋回中であることが検出され、スリップ状態検出部で車両がスリップ状態であることが検出された場合、路面摩擦係数推定演算部で推定された路面摩擦係数に対応する制御指令値を取得してサスペンションに制御指令値を入力する制御部214と、を有する。
【選択図】図2
特許請求の範囲
【請求項1】
車両のサスペンション装置に制御指令値を出力して減衰力可変ダンパーの減衰力を制御するサスペンション制御装置であって、
前記車両の旋回状態を検出する旋回状態検出部と、
前記車両のスリップ状態を検出するスリップ状態検出部と、
前記車両が接地している路面の路面摩擦係数を推定する路面摩擦係数推定演算部と、
前記旋回状態検出部で前記車両が旋回中であることが検出され、前記スリップ状態検出部で前記車両がスリップ状態であることが検出された場合、前記路面摩擦係数推定演算部で推定された前記路面摩擦係数に対応する前記制御指令値を取得して前記サスペンション装置に前記制御指令値を入力する旋回スリップ制御を行う制御部と、
を有するサスペンション制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記サスペンション装置は、
前記減衰力可変ダンパーとサスペンションばねとを有するセミアクテイブタイプのサスペンション装置であって、
前記制御部は、
前記スリップ状態を含む特定の状態を除き、前記車両が有する車輪の回転速度から前記減衰力可変ダンパーのストロークを推定して前記制御指令値を算出する通常時制御を行う、請求項1記載のサスペンション制御装置。
【請求項3】
前記制御部は、
前記路面摩擦係数を参照した無次元量であるスリップゲインを演算によって求め、前記スリップゲインを前記制御指令値に乗算して前記車両が有する外輪側前輪の接地荷重を相対的に高める制御を行う、請求項1記載のサスペンション制御装置。
【請求項4】
前記制御部は、
協調制御システムが動作している場合、前記協調制御システムによる制御を優先し、前記協調制御システムが算出する制御指令値を取得して前記サスペンション装置に前記制御指令値を入力する、請求項1記載のサスペンション制御装置。
【請求項5】
前記制御部は、
前記車両が旋回を始めてから旋回姿勢が決まるまでの旋回過渡状態において目標ステア状況に対し前記車両がオーバーステア傾向にあると判定された場合、前記制御指令値が大きくなるように補正して前記車両をアンダーステア傾向に誘導し、
前記旋回過渡状態において、前記目標ステア状況に対し前記車両が前記アンダーテア傾向にあると判定された場合、前記制御指令値が小さくなるように補正して前記車両をオーバーステア傾向に誘導する、請求1記載のサスペンション制御装置。
【請求項6】
前記制御部は、
前記車両が旋回を始めてから旋回姿勢が決まるまでの旋回過渡状態において、目標ステア状況に対し前記車両がオーバーステア傾向にあると判定された場合、前記スリップゲインを補正して前記車両をアンダーステア傾向に誘導し、前記旋回過渡状態において、前記目標ステア状況に対し前記車両が前記アンダーテア傾向にあると判定された場合、前記スリップゲインを補正して前記車両をオーバーステア傾向に誘導する、請求項1記載のサスペンション制御装置。
【請求項7】
前記制御部は、
前記旋回スリップ制御から、前記車両が有する車輪の回転速度から前記減衰力可変ダンパーのストロークを推定して前記制御指令値を算出する通常時制御へ移行する時間が、前記通常時制御から前記旋回スリップ制御へ移行する最低所要時間以上の長さに設定する制御を行う、請求項1記載のサスペンション制御装置。
【請求項8】
前記スリップ状態検出部は、
前記旋回状態検出部が前記旋回状態を検出した場合に前記外輪側前輪のスリップ状態を検出し、
前記路面摩擦係数推定演算部は、
前記旋回状態検出部が前記旋回状態を検出した場合に、外輪側前輪が接地している路面の路面摩擦係数を推定し、
前記制御部は、
前記外輪側前輪がスリップ状態にある場合に前記旋回スリップ制御を行い、外輪側前輪以外の車輪がスリップ状態にある場合は固定電流制御または通常時制御を行う、請求項1記載のサスペンション制御装置。
【請求項9】
前記スリップ状態検出部は、
前記前記旋回状態検出部が前記旋回状態を検出した場合に他の車輪のスリップ状態を更に検出し、
前記路面摩擦係数推定演算部は、
前記旋回状態検出部が前記旋回状態を検出した場合に、前記他の車輪が接地している路面の路面摩擦係数を推定し、
前記制御部は、
前記外輪側前輪のみがスリップしている状態よりも、前記外輪側の前輪と前記他の車輪とがスリップしている状態の方が、前記外輪側前輪の接地荷重をより高める前記旋回スリップ制御を行う、請求項1記載のサスペンション制御装置。
【請求項10】
前記路面摩擦係数推定演算部は、
少なくとも前記旋回スリップ制御を行う間は前記路面摩擦係数の推定演算を継続し、前記路面摩擦係数の増減の変化量が同じ場合、減少する場合よりも増加する場合の方を、前記路面摩擦係数を参照した無次元量であるスリップゲインの変化幅を小さくする制御を行う、請求項1記載のサスペンション制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両のサスペンション装置に制御指令値を入力して減衰力可変ダンパーの減衰力を制御するサスペンション制御装置等に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、車両のサスペンション装置において、車速センサ等のCAN(Control Area Network)情報をもとにダンパーストローク速度を演算により求め、路面の状況に合わせて最適な減衰力を提供する減衰力可変ダンパーを用いた電子制御式ダンパーが知られている。減衰力可変ダンパーは、車体と4つの車輪との間にそれぞれ設けられ、車体と車輪間の相対変位を抑制する力を可変とするアクチュエータであり、車体と車輪との間に発生する力を可変とし、「ソフト状態」と「ハード状態」との間で調整が可能である。
【0003】
例えば、一定車速未満では、減衰力可変ダンパーの減衰力を「ソフト状態」に設定し、一定速度以上の場合には、「ソフト状態」から「ミディアム状態」か「ハード状態」に切り替えて車両の安定性を高めている。また、コーナリング等において、ドライバが車両を急激に旋回させるべくステアリングを旋回操作した場合、そのときのステアリング角速度や車速に応じて減衰力可変ダンパーの減衰力を「ミディアム状態」か「ハード状態」に切り替える制御も行なっている。
【0004】
ところで、上述した電子制御式ダンパーでは路面状況を検知するために様々な方法がとられている。例えば、専用の検知デバイスを使用して前方路面の状況を検知してサスペンションやステアリングを制御するモデルがある。また、専用の検知デバイスを使用することなく、車輪速等、既存のセンサのCAN情報から車両の挙動をいち早く推定し、減衰力特性や可変特性を変えてドライバの操作に気持ちよく反応できるサスペンションセッティングを作り出すモデルがIECAS(登録商標)として知られている。なお、登録商標IECASは、Intelligent Electronic Control Adaptive suspensionの略である。
【0005】
IECAS(登録商標)によれば、車輪速センサの検出データにより、タイヤにかかる荷重や外乱によってタイヤ半径が変化することを利用して車両がどのような状態にあるかを判断して次の挙動を推定することができる。車輪速に限らず、CAN経由で取得される前後Gや横G、ヨーレート、操舵角、エンジントルク等のデータも利用することにより、ドライバが求めるハンドリングと挙動を作り出すことができる。以降の説明では便宜上このモデルを従来技術と言う。
【0006】
また、例えば、特許文献1に、低摩擦路面(低μ路面)走行中の旋回時における操縦安定性を向上させ、更には、高摩擦路面走行中の旋回時における車体の安定性を向上させる車両用サスペンション装置の技術が記載されている。特許文献1に記載された技術によれば、例えば、同文献の図3に「総合ロール制御処理」がフローチャートで示されているように、アンチロール機能を有する車両において、制御部が、「低μ路面走行判定ルーチン」を実行した後、車両走行路面が摩擦係数の低い低μ路面を走行中であるか否かを判定し、低μ路面を走行中であると判定した場合は「低μ路面ロール制御ルーチン」を実行し、車両走行路面が摩擦係数の低い低μ路面でないと判定した場合は「通常のアンチロール制御ルーチン」を実行する2段階制御を行う構成になっている。
【先行技術文献】
【特許文献】
【0007】
特開平7-101219号公報(段落[0024]、図3参照)
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、コーナリングへの旋回突入時等の旋回過渡状態では、適切な減衰比(減衰力)を維持した状態で外輪側前輪に荷重が最も作用し、タイヤ横力(横滑り等でタイヤに生じるタイヤの回転方向に対して直角方向に作用する力)がグリップ力(タイヤが路面をとらえる力)以下となってコーナリングの旋回が可能になる。
【0009】
しかしながら、例えば、図10に、グリップ力Fと減衰力DF(減衰比)との関係を示すように、領域aでは減衰力DFが高くなるほど車両のロールレートを抑制する効果はあるが、その背反として外輪側前輪に垂直荷重Nが作用せず、タイヤ横力が増加してグリップ力F(横軸)を上回ってしまうためアンダーステアが発生する。また、例えば、領域bに示すように、低い路面摩擦係数(低μ)の場合は摩擦円(後述する図9参照)が相対的に小さくなる影響(グリップ力F=μNの関係からμが低いとグリップ力Fが低くなる)からグリップ力Fが低下してタイヤ横力の適正範囲Xが狭まり(狭まった適正範囲Y)、ドライ路面では適切であった減衰力DFが過減衰になってアンダーステアが発生する領域が増加する。
【0010】
この場合、例えば、実線と破線で囲んだ領域cの下向き太矢印で示すように、低μ路でグリップ力Fが低下した場合、上向き太矢印で示すようにタイヤ横力を適正範囲Xに設定してグリップ力Fを回復させるために減衰力DFを調整することで外輪側前輪への垂直荷重(接地荷重N)を増やす必要があり、結果的に低μ路でも摩擦円を大きくすることができる。しかしながら、スリップを検知した場合、車輪速に基づき車両の挙動をいち早く推定し減衰力特性や可変特性を変える従来技術では、適切な車両の挙動を推定することが困難になるため、減衰力特性を変えるための推定がキャンセルされ、固定電流値モードに移行する仕様になっており、フェールセーフの観点から固定電流値が提供されて高い減衰力に設定される傾向がある。固定電流値モードでは、減衰力可変ダンパー(アクチュエータ)に出力される減衰力制御のための電流値を木目細かく制御することができず、車両旋回時にスリップが検出された場合、減衰力の増加により外輪側前輪の接地荷重が相対的に小さくなってアンダーステアを発生させるという課題を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
Astemo株式会社
樹脂筐体
1日前
Astemo株式会社
半導体装置
7日前
Astemo株式会社
電池監視装置
1日前
Astemo株式会社
電動駆動装置
1日前
Astemo株式会社
電流検出装置
3日前
Astemo株式会社
電圧検出装置
3日前
Astemo株式会社
電動モータ装置
今日
Astemo株式会社
バッテリー充電装置
3日前
Astemo株式会社
緩衝装置、懸架装置
1日前
Astemo株式会社
インバータ制御装置
13日前
Astemo株式会社
バンプストッパ、緩衝器
3日前
Astemo株式会社
支持ユニット、懸架装置
3日前
Astemo株式会社
放電装置及び電力変換装置
今日
Astemo株式会社
インジェクタ故障検出装置
3日前
Astemo株式会社
制御装置及び鍵情報秘匿方法
3日前
Astemo株式会社
タスク処理方法および制御装置
3日前
Astemo株式会社
地絡検出装置及び地絡検出方法
7日前
Astemo株式会社
車両制御装置及び車両制御方法
7日前
Astemo株式会社
めっき部材およびその製造方法
14日前
Astemo株式会社
ナット部材、緩衝装置、加圧工具
今日
Astemo株式会社
電池監視装置及び電池管理システム
1日前
Astemo株式会社
車両制御装置及びセンサデータ処理方法
1日前
Astemo株式会社
自動車用電子制御装置およびメモリ管理装置
3日前
Astemo株式会社
サーバ装置
13日前
Astemo株式会社
走行支援装置
13日前
Astemo株式会社
車両制御システム
2日前
Astemo株式会社
改善システム、改善方法
7日前
Astemo株式会社
サスペンション制御装置、サスペンション制御方法、およびサスペンション制御プログラム
1日前
個人
カーテント
4か月前
個人
タイヤレバー
2か月前
個人
警告装置
5か月前
個人
前輪キャスター
1か月前
個人
車窓用防虫網戸
4か月前
個人
小型EVシステム
5か月前
個人
車輪清掃装置
4か月前
個人
タイヤ脱落防止構造
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ