TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025141699
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041753
出願日
2024-03-15
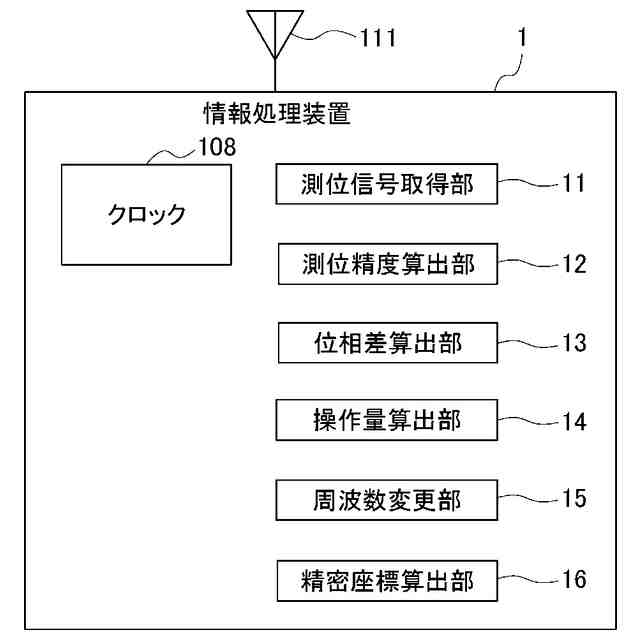
発明の名称
情報処理装置、情報処理方法および情報処理プログラム
出願人
株式会社コア
代理人
弁理士法人白坂
主分類
G01S
19/23 20100101AFI20250919BHJP(測定;試験)
要約
【課題】GNSS基準周波数発生器における内部時計の確度と安定度の最適化を測位の時間帯または場所ごとに低コストに行うことができる、情報処理装置、情報処理方法および情報処理プログラムを提供する。
【解決手段】測位衛星から測位信号を取得し、取得された測位信号に基づき、測位精度を算出し、取得された測位信号から取得されたクロックの位相と、内部時計から取得されたクロックの位相との位相差を算出し、算出された測位精度と、算出された位相差とを制御パラメータとして用いた算出式において、内部時計の周波数を操作する操作量を算出し、算出された操作量に基づき、内部時計の周波数を変更する。
【選択図】図4
特許請求の範囲
【請求項1】
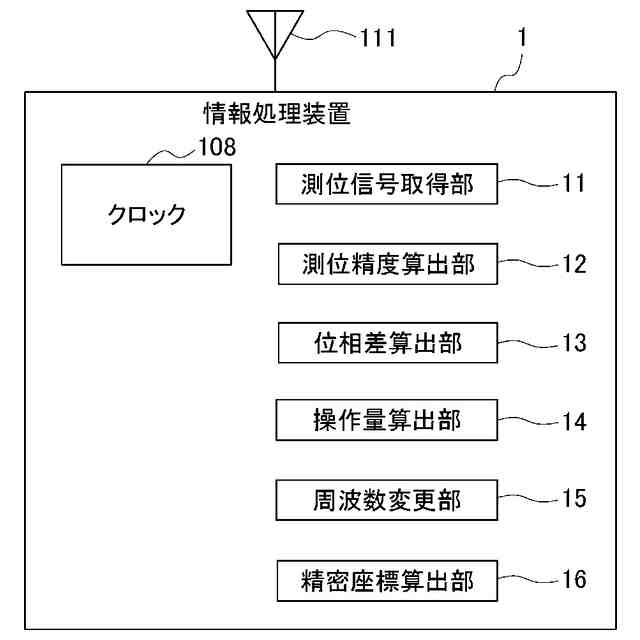
測位衛星から測位信号を取得する測位信号取得部と、
前記測位信号取得部において取得された測位信号に基づき、測位精度を算出する測位精度算出部と、
前記測位信号取得部において取得された測位信号から取得されたクロックの位相と、内部時計から取得されたクロックの位相との位相差を算出する位相差算出部と、
前記測位精度算出部において算出された測位精度と、前記位相差算出部において算出された位相差とを制御パラメータとして用いた算出式において、内部時計の周波数を操作する操作量を算出する操作量算出部と、
前記操作量算出部において算出された操作量に基づき、内部時計の周波数を変更する周波数変更部と
を備える、情報処理装置。
続きを表示(約 1,200 文字)
【請求項2】
前記操作量算出部は、前記測位精度算出部において算出される測位精度の誤差共分散行列と、前記操作量算出部において用いられる制御パラメータとを予め対応付けた離散的なマップを参照することにより、前記操作量を算出する、請求項1に記載の情報処理装置。
【請求項3】
前記操作量算出部は、前記マップにおける測位精度の誤差共分散行列と、前記測位精度算出部において算出された誤差共分散行列との差分を算出し、算出した差分に基づき前記制御パラメータを補間する、請求項2に記載の情報処理装置。
【請求項4】
前記操作量算出部は、前記差分が予め定められた閾値を超える場合、前記制御パラメータを補間しない、請求項3に記載の情報処理装置。
【請求項5】
前記測位信号取得部は、MADOCA-PPP(Multi-GNSS ADvanced Orbit and Clock Augmentation- Precise Point Positioning)における補強信号を取得する、請求項1から4のいずれか一項に記載の情報処理装置。
【請求項6】
測位衛星から測位信号を取得する測位信号取得ステップと、
前記測位信号取得ステップにおいて取得された測位信号に基づき、測位精度を算出する測位精度算出ステップと、
前記測位信号取得ステップにおいて取得された測位信号から取得されたクロックの位相と、内部時計から取得されたクロックの位相との位相差を算出する位相差算出ステップと、
前記測位精度算出ステップにおいて算出された測位精度と、前記位相差算出ステップにおいて算出された位相差とを制御パラメータとして用いた算出式において、内部時計の周波数を操作する操作量を算出する操作量算出ステップと、
前記操作量算出ステップにおいて算出された操作量に基づき、内部時計の周波数を変更する周波数変更ステップと
を含む、情報処理方法。
【請求項7】
測位衛星から測位信号を取得する測位信号取得機能と、
前記測位信号取得機能において取得された測位信号に基づき、測位精度を算出する測位精度算出機能と、
前記測位信号取得機能において取得された測位信号から取得されたクロックの位相と、内部時計から取得されたクロックの位相との位相差を算出する位相差算出機能と、
前記測位精度算出機能において算出された測位精度と、前記位相差算出機能において算出された位相差とを制御パラメータとして用いた算出式において、内部時計の周波数を操作する操作量を算出する操作量算出機能と、
前記操作量算出機能において算出された操作量に基づき、内部時計の周波数を変更する周波数変更機能と
をコンピュータに実行させるための、情報処理プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法および情報処理プログラムに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、衛星からの衛星信号を移動体で受信して、移動体の位置情報を測位することが行われている。位置情報を測位する測位システムとしては、例えば、GPS(Global Positioning System)、GLONASS(Global Navigation Satellite System)、Galileo、QZSS(Quasi-Zenith Satellite System:準天頂衛星システム)等の衛星測位システム(GNSS:Global Navigation Satellite System)が存在する。衛星測位システムの単独測位方式においては、GNSSから配信されるGNSS信号を使用して移動体単独で位置情報を測位する。単独測位方式においては、GNSS信号に含まれる誤差によってメートルオーダーの誤差を含む測位精度を実現することができる。
【0003】
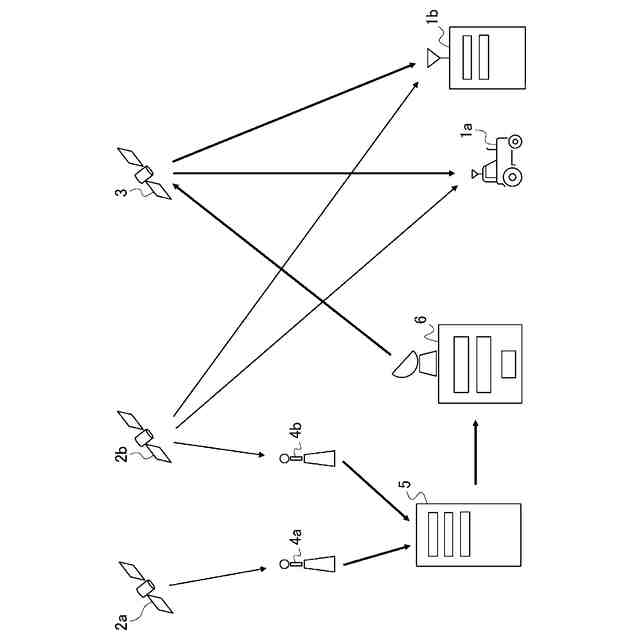
また、MADOCA-PPP(Multi-GNSS ADvanced Orbit and Clock Augmentation-Precise Point Positioning;精密軌道・クロック推定ソフトウェアを用いた測位)においては、複数の電子基準点網において収集されたGNSS信号を管制局が取得し、取得したデータをもとに衛星クロック及び軌道誤差を推定する。管制局は、推定された誤差情報から測位衛星の測位信号を補強する補強データ(MADOCAデータ)を生成する。生成されたMADOCAデータは、準天頂衛星(QZS:Quasi-Zenith Satellite)を介して移動体に配信される。補強情報を取得した移動体は、補強情報を使用してGNSS測位の際に必要な衛星のクロック及び軌道誤差情報の高精度化を行うことで、センチメーターオーダーの精度で位置情報を取得することができる。
【0004】
ところで、OCXO(Oven-controlled Crystal Oscillator)のような水晶発振器、または、CSAC(Chip Scale Atomic Clock)のような原子時計等の発振器は、温度変化等の要因により経時的に周波数の確度(Accuracy)及び安定度(Stability)が低下する。このため、これらの発振器においては、衛星からの測位信号を用いて周波数を補正するGNSS基準周波数発生器の技術が知られている。例えば、特許文献1には、原子発振器の出力周波数を調整する信号を外部から受信し、受信した信号に基づき出力周波数が制御されるGPSDO(GPS Disciplined Oscillator)の技術が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2017-118276号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、発振器の周波数の確度及び安定度の低下を小さくするためには、例えば高価な発振器を用いたり厳密な温度管理をしたりする等が必要となり、システムが大型化して装置コストが高くなる場合があった。また、GNSSからの測位信号は、様々な誤差要因により確度及び精度が低下する場合がある。誤差要因には、例えば、衛星の軌道誤差、時計誤差、電離層の変動、対流圏の変動、またはマルチパス等が存在する。これらの誤差要因は測位信号を受信する時間帯または場所によって変動する。このため、GNSS基準周波数発生器においてGNSSからの測位信号を用いて内部時計を補正すると、内部時計の周波数確度及び周波数安定度が測位の時間帯または場所によって変動してしまう場合があった。
【0007】
また、GNSS基準周波数発生器において、GNSSからの測位信号は、様々な誤差要因により、確度と精度が低下する場合がある。誤差要因には、例えば、衛星の軌道誤差、時計誤差、電離層の変動、対流圏の変動、またはマルチパス等が存在する。これらの誤差要因は測位信号を受信する時間帯または場所によって変動するため、GNSSからの測位信号を用いて予め定めた固定値の制御パラメータで内部時計の制御を行い、内部時計を補正すると、内部時計の確度と安定度が測位の時間帯または場所によっては最適値とならない場合があった。
【0008】
本発明は上記事情に鑑みてなされたものであり、GNSS基準周波数発生器における内部時計の確度と安定度の最適化を測位の時間帯または場所ごとに低コストに行うことができる、情報処理装置、情報処理方法および情報処理プログラムを提供することを一つの目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するため、情報処理装置は、測位衛星から測位信号を取得する測位信号取得部と、測位信号取得部において取得された測位信号に基づき、測位精度を算出する測位精度算出部と、測位信号取得部において取得された測位信号から取得されたクロックの位相と、内部時計から取得されたクロックの位相との位相差を算出する位相差算出部と、測位精度算出部において算出された測位精度と、位相差算出部で算出された位相差とを制御パラメータとして用いた算出式において、内部時計の周波数を操作する操作量を算出する操作量算出部と、操作量算出部において算出された操作量に基づき、内部時計の周波数を変更する周波数変更部と、を備える。
【発明の効果】
【0010】
本発明の一つの実施形態によれば、測位衛星から測位信号を取得し、取得された測位信号に基づき、測位精度を算出し、取得された測位信号から取得されたクロックの位相と、内部時計から取得されたクロックの位相との位相差を算出し、算出された測位精度と、算出された位相差とを制御パラメータとして用いた算出式において、内部時計の周波数を操作する操作量を算出し、算出された操作量に基づき、内部時計の周波数を変更することにより、GNSS基準周波数発生器における内部時計の確度と安定度の最適化を測位の時間帯または場所ごとに低コストに行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社コア
信号認証アダプター
2日前
株式会社コア・プログレスイノベーション
申請書作成システム、申請書作成方法及びプログラム
1か月前
株式会社コア
情報処理装置、情報処理方法および情報処理プログラム
2日前
株式会社コアコンセプト・テクノロジー
3次元CADシステム
14日前
個人
計量スプーン
22日前
個人
微小振動検出装置
1か月前
株式会社イシダ
X線検査装置
1か月前
日本精機株式会社
位置検出装置
今日
日本精機株式会社
位置検出装置
今日
日本精機株式会社
位置検出装置
今日
大和製衡株式会社
組合せ秤
5日前
大和製衡株式会社
組合せ秤
5日前
株式会社東芝
センサ
5日前
株式会社東芝
センサ
1か月前
トヨタ自動車株式会社
検査装置
2日前
株式会社ユーシン
操作検出装置
2日前
トヨタ自動車株式会社
表示装置
14日前
アンリツ株式会社
分光器
28日前
アンリツ株式会社
分光器
28日前
ダイハツ工業株式会社
測定用具
26日前
株式会社東芝
センサ
5日前
東レエンジニアリング株式会社
計量装置
2日前
TDK株式会社
磁気センサ
22日前
株式会社精工技研
光電圧プローブ
1か月前
株式会社ヨコオ
コンタクタ
26日前
TDK株式会社
磁気センサ
29日前
株式会社ナリス化粧品
角層細胞採取用具
12日前
個人
粘塑性を用いた有限要素法の定式化
14日前
成田空港給油施設株式会社
保持治具
13日前
中国電力株式会社
異常箇所検出装置
13日前
富士電機株式会社
半導体パッケージ
22日前
日本碍子株式会社
ガスセンサ
23日前
大陽日酸株式会社
液面センサ
29日前
三菱マテリアル株式会社
温度センサ
12日前
個人
材料特性パラメータの算定方法
22日前
大同特殊鋼株式会社
超音波探傷方法
22日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ