TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025136767
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024035598
出願日
2024-03-08
発明の名称
車両製造システム、及び車両製造方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B62D
65/18 20060101AFI20250911BHJP(鉄道以外の路面車両)
要約
【課題】通信負荷、及び処理負荷を抑制することができる車両製造システム、及び車両製造方法を提供する。
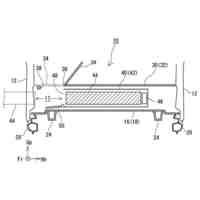
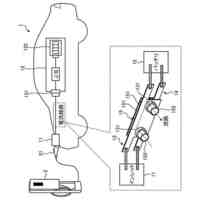
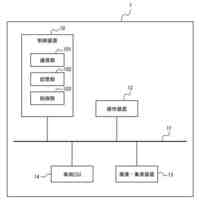
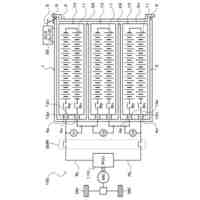
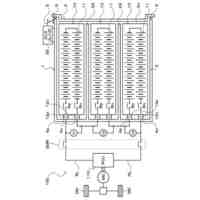
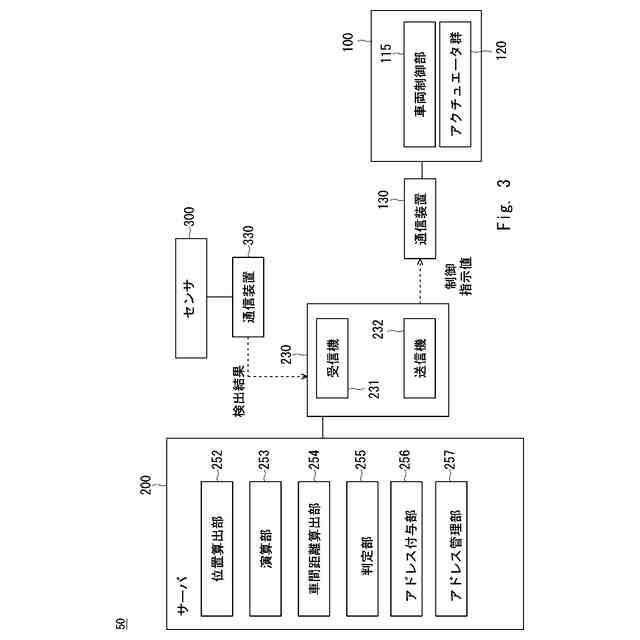
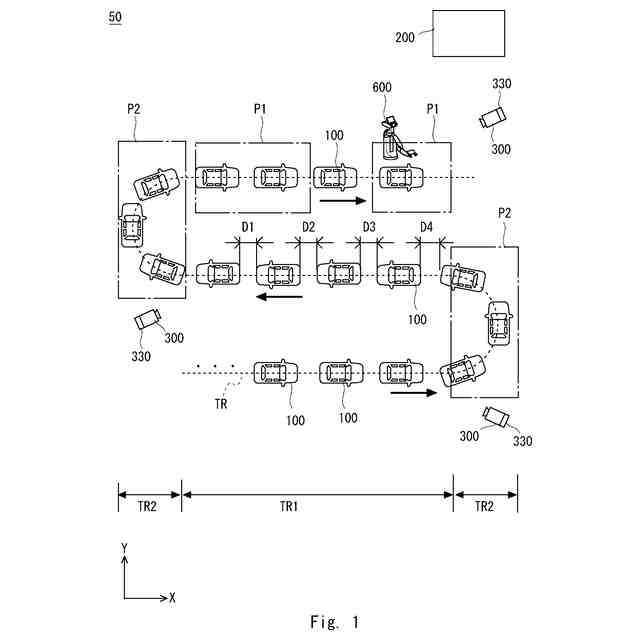
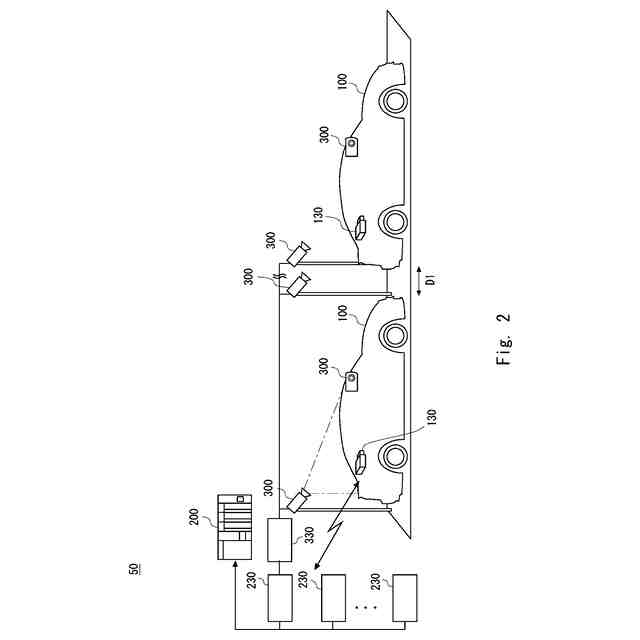
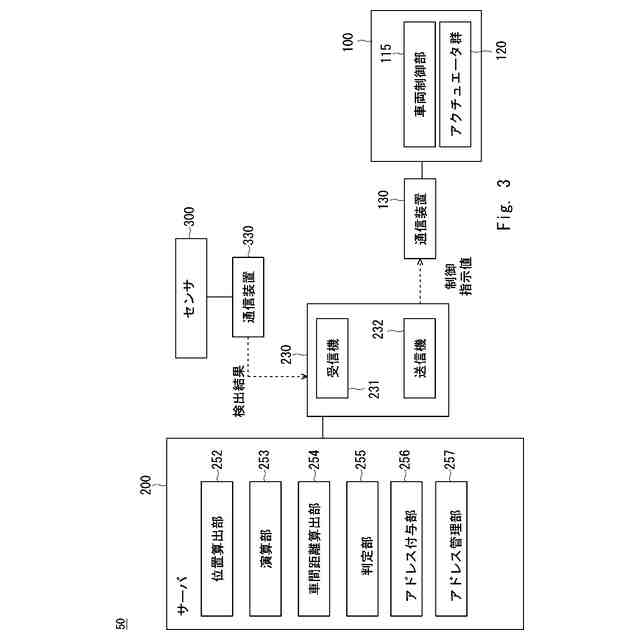
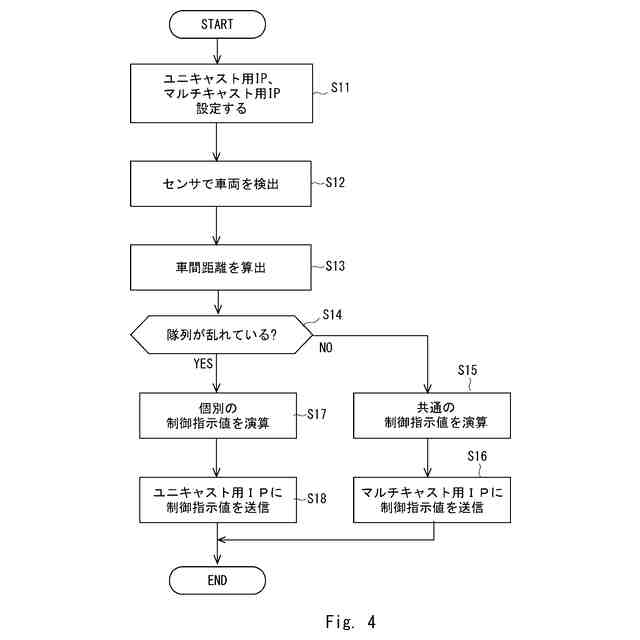
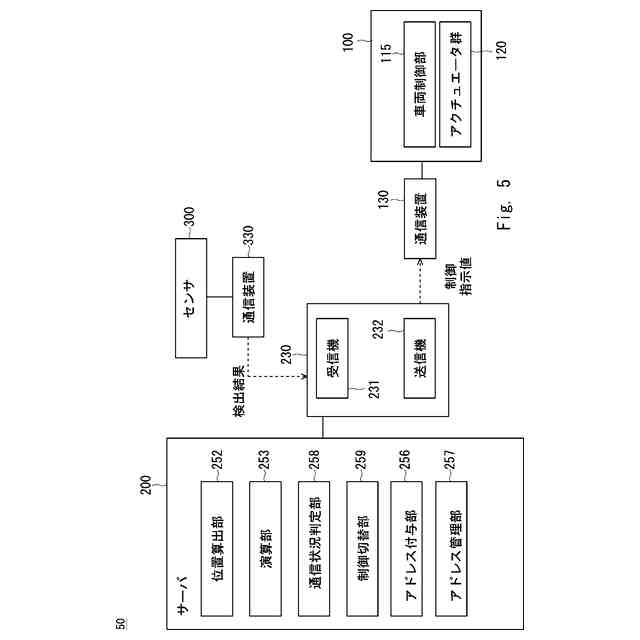
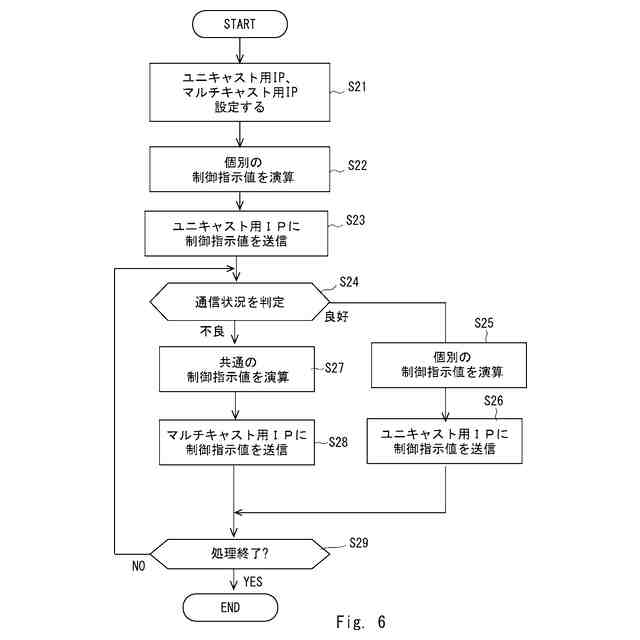
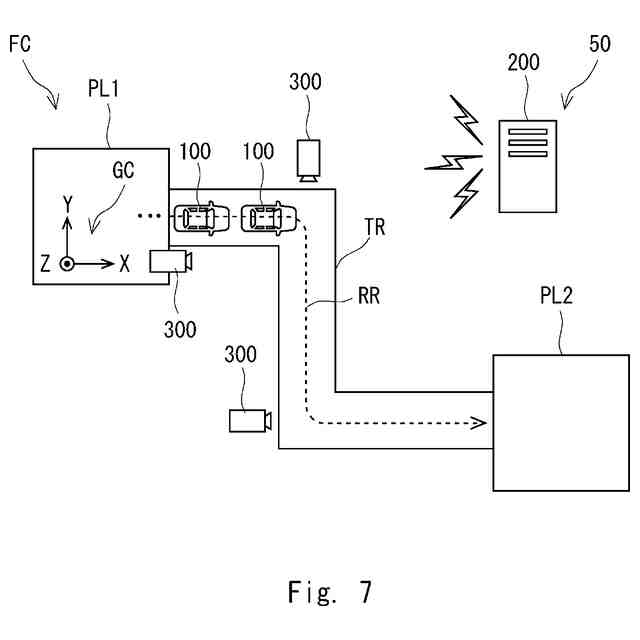
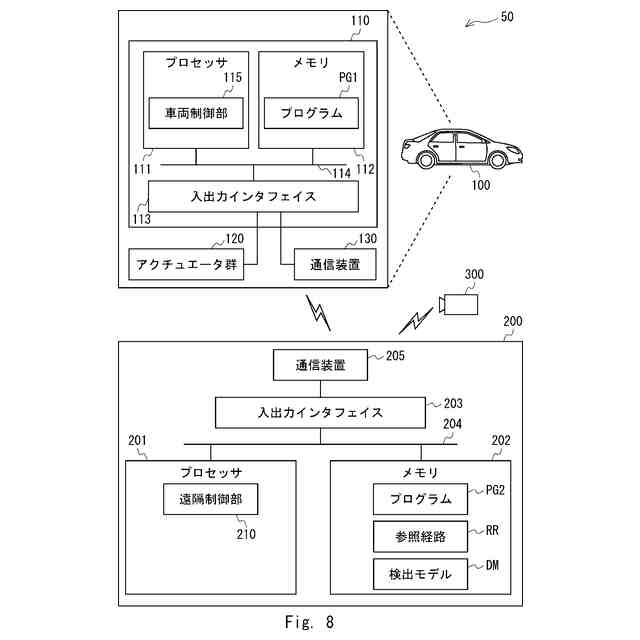
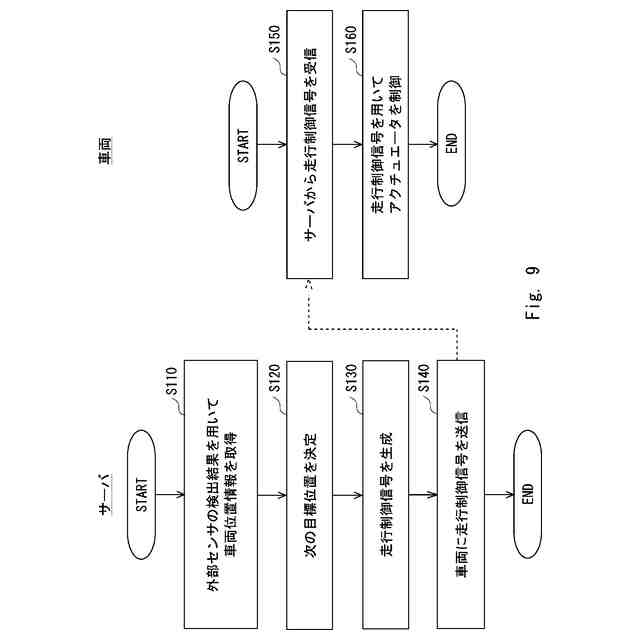
【解決手段】本実施形態にかかる車両製造システム50は、製造工程中又は搬送工程中において、複数の車両が隊列を成して走行するように制御する車両製造システムであって、制御指示値を演算する演算部と、車間距離を検出するために設けられたセンサ300と、車間距離に基づいて、隊列が乱れているか否かを判定する判定手段と、隊列が乱れていない場合に、複数の車両100に対して、共通の制御指示値を送信する送信機と、車両100に設けられ、制御指示値を受信する通信装置130と、制御指示値に応じて、車両の速度を制御する速度制御手段と、を備えている。
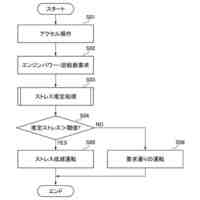
【選択図】図3
特許請求の範囲
【請求項1】
製造工程中又は搬送工程中において、複数の車両が隊列を成して走行するように制御する車両製造システムであって、
前記車両の速度を制御するための制御指示値を演算する演算手段と、
隣接する前記車両の車間距離を検出するために設けられたセンサと、
前記車間距離に基づいて、前記隊列が乱れているか否かを判定する判定手段と
前記隊列が乱れていない場合に、前記複数の車両に対して、共通の制御指示値を送信する送信機と、
前記車両に設けられ、前記制御指示値を受信する通信装置と、
前記制御指示値に応じて、前記車両の速度を制御する速度制御手段と、を備えた車両製造システム。
続きを表示(約 1,100 文字)
【請求項2】
前記隊列が乱れている場合に、前記送信機が、それぞれの車両に対して個別の制御指示値を送信する請求項1に記載の車両製造システム。
【請求項3】
前記隊列が乱れていない場合に、前記複数の車両の前記通信装置に共通アドレスを付与し、前記隊列が乱れている場合に、前記複数の車両の前記通信装置に個別アドレスを付与するアドレス付与手段をさらに備えた請求項2に記載の車両製造システム。
【請求項4】
前記車間距離が変動すると予測される予測箇所に到達した前記車両には、前記送信機が個別の制御指示値を送信する請求項1~3のいずれか1項に記載の車両製造システム。
【請求項5】
前記隊列のいずれかの車両を撮像するカメラを備え、
前記演算手段が、前記カメラでの撮像結果に基づいて、前記制御指示値を演算する請求項1~3のいずれか1項に記載の車両製造システム。
【請求項6】
前記制御指示値が、車両の速度又は加速度を示す値を含む請求項1~3のいずれか1項に記載の車両製造システム。
【請求項7】
製造工程中又は搬送工程中において、複数の車両が隊列を成して走行するように制御する車両製造方法であって、
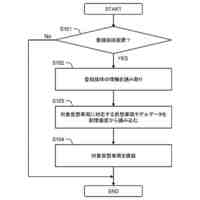
前記車両の速度を制御するための制御指示値を演算するステップと、
センサの検出結果に基づいて、隣接する前記車両の車間距離を検出するステップと、
前記車間距離に基づいて、前記隊列が乱れているか否かを判定するステップと
前記隊列が乱れていない場合に、送信機が前記複数の車両に対して、共通の制御指示値を送信するステップと、
前記車両に設けられた通信装置によって、前記制御指示値を受信するステップと、
前記制御指示値に応じて、前記車両の速度を制御するステップと、を備えた車両製造方法。
【請求項8】
前記隊列が乱れている場合に、前記送信機が、それぞれの車両に対して個別の制御指示値を送信する請求項7に記載の車両製造方法。
【請求項9】
前記隊列が乱れていない場合に、前記複数の車両の前記通信装置に共通アドレスを付与し、前記隊列が乱れている場合に、前記複数の車両の前記通信装置に個別アドレスを付与するアドレス付与手段をさらに備えた請求項7に記載の車両製造方法。
【請求項10】
前記車間距離が変動すると予測される予測箇所に到達した前記車両には、前記送信機が個別の制御指示値を送信する請求項7~9のいずれか1項に記載の車両製造方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両製造システム、及び車両製造方法に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
特許文献1には、車両の製造システムが開示されている。車両は自律制御又は遠隔制御により、車両を生産するためのシステム内を走行する。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の製造工場では、複数の車両が順次製造されていく。複数の車両を自走搬送する場合、サーバなどが、複数の車両に対して、制御指示値を無線信号として送信する。サーバが、それぞれの車両に対して、制御指示値を個別に求めて、送信する場合、通信負荷、及び処理負荷が増大してしまう。
【0005】
そこで本開示の目的は、通信負荷、及び処理負荷を抑制することができる車両製造システム、及び車両製造方法を提供することである。
【課題を解決するための手段】
【0006】
本開示にかかる車両製造システムは、製造工程中又は搬送工程中において、複数の車両が隊列を成して走行するように制御する車両製造システムであって、前記車両の速度を制御するための制御指示値を演算する演算手段と、隣接する前記車両の車間距離を検出するために設けられたセンサと、前記車間距離に基づいて、前記隊列が乱れているか否かを判定する判定手段と、前記隊列が乱れていない場合に、前記複数の車両に対して、共通の制御指示値を送信する送信機と、前記車両に設けられ、前記制御指示値を受信する通信装置と、前記制御指示値に応じて、前記車両の速度を制御する速度制御手段と、を備えている。
【0007】
上記の車両製造システムにおいて、前記隊列が乱れている場合に、前記送信機が、それぞれの車両に対して個別の制御指示値を送信するようにしてもよい。
【0008】
上記の車両製造システムにおいて、前記隊列が乱れていない場合に、前記複数の車両の前記通信装置に共通アドレスを付与し、前記隊列が乱れている場合に、前記複数の車両の前記通信装置に個別アドレスを付与するアドレス付与手段をさらに備えていてもよい。
【0009】
上記の車両製造システムにおいて、前記車間距離が変動すると予測される予測箇所に到達した前記車両には、前記送信機が個別の制御指示値を送信するようにしてもよい。
【0010】
上記の車両製造システムにおいて、前記隊列のいずれかの車両を撮像するカメラを備え、前記演算手段が、前記カメラでの撮像結果に基づいて、前記制御指示値を演算するようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
装置
12日前
トヨタ自動車株式会社
装置
12日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
回転子
3日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
モータ
3日前
トヨタ自動車株式会社
加熱装置
2日前
トヨタ自動車株式会社
駆動装置
10日前
トヨタ自動車株式会社
電動車両
11日前
トヨタ自動車株式会社
電動車両
11日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
内燃機関
2日前
トヨタ自動車株式会社
溶接装置
16日前
トヨタ自動車株式会社
電源装置
13日前
トヨタ自動車株式会社
蓄電装置
16日前
トヨタ自動車株式会社
冷却装置
2日前
トヨタ自動車株式会社
給電装置
2日前
トヨタ自動車株式会社
電動車両
11日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
制御装置
3日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
制御装置
16日前
トヨタ自動車株式会社
表示装置
4日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
水系電池
10日前
トヨタ自動車株式会社
電気自動車
11日前
トヨタ自動車株式会社
電気自動車
12日前
トヨタ自動車株式会社
電池パック
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ