TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025135670
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024033548
出願日
2024-03-06
発明の名称
走歩行評価方法、走歩行評価装置及びプログラム
出願人
カシオ計算機株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
A61B
5/11 20060101AFI20250911BHJP(医学または獣医学;衛生学)
要約
【課題】走歩行時の対象者の状態をより精度よく評価することのできる走歩行評価方法、走歩行評価装置及びプログラムを提供する。
【解決手段】走歩行評価方法は、走歩行路の情報に基づいて走歩行路の傾斜状態を特定し、対象者の走歩行状態に基づいて傾斜状態に応じて対象者の姿勢を評価する。姿勢の評価には、矢状面角度及び前額面角度の代表値及びばらつきが含まれてもよい。姿勢の評価には、対象者の走歩行アクティビティの開始からの経過時間に応じた姿勢の変化が含まれてもよい。
【選択図】図8
特許請求の範囲
【請求項1】
走歩行路の情報に基づいて前記走歩行路の傾斜状態を特定し、
対象者の走歩行状態に基づいて前記傾斜状態に応じた前記対象者の姿勢を評価する、
走歩行評価方法。
続きを表示(約 710 文字)
【請求項2】
前記姿勢の評価には、矢状面角度及び前額面角度の代表値及びばらつきが含まれる、請求項1記載の走歩行評価方法。
【請求項3】
前記姿勢の評価には、前記対象者の走歩行アクティビティの開始からの経過時間に応じた前記姿勢の変化が含まれる、請求項1記載の走歩行評価方法。
【請求項4】
前記姿勢の評価には、傾斜のない前記傾斜状態である平坦路における前記姿勢の評価と、傾斜のある前記傾斜状態である坂道における前記姿勢の評価との比較が含まれる、請求項1記載の走歩行評価方法。
【請求項5】
前記姿勢の評価には、傾斜のある前記傾斜状態である坂道を挟んで位置する傾斜のない前記傾斜状態である平坦路における前記姿勢の評価の比較が含まれる、請求項1記載の走歩行評価方法。
【請求項6】
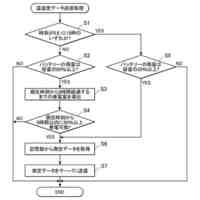
前記対象者の前記評価を前記走歩行路の傾斜状態に応じて分類して記憶し、
前記評価には、過去の同レベルの傾斜状態で得られている前記姿勢の評価との比較結果が含まれる、請求項1記載の走歩行評価方法。
【請求項7】
走歩行路の情報に基づいて前記走歩行路の傾斜状態を特定し、
対象者の走歩行状態に基づいて前記傾斜状態に応じた前記対象者の姿勢を評価する
制御部を備える走歩行評価装置。
【請求項8】
コンピュータを、
走歩行路の情報に基づいて前記走歩行路の傾斜状態を特定する特定手段、
対象者の走歩行状態に基づいて前記傾斜状態に応じた前記対象者の姿勢を評価する評価手段、
として機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
この発明は、走歩行評価方法、走歩行評価装置及びプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
センサを利用してユーザの走歩行状態を評価する技術がある。特許文献1では、気圧センサで大気圧を検出することで、ユーザの高度の上昇量を算出し、ユーザが上り坂を移動しているかどうかなどの判断基準としている点について記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-6335号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
対象者のパフォーマンスに影響する対象者の状態には、対象者の姿勢が含まれる。これらは、安定して走歩行していても、路面の傾斜状態などに応じて変化し得る。したがって、対象者の姿勢を一律に扱うと、坂道を含むトレーニングなどにおいて、精度よく状態が評価されないという課題がある。
【0005】
この発明の目的は、走歩行時の対象者の状態をより精度よく評価することのできる走歩行評価方法、走歩行評価装置及びプログラムを提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明は、
走歩行路の情報に基づいて前記走歩行路の傾斜状態を特定し、
対象者の走歩行状態に基づいて前記傾斜状態に応じた前記対象者の姿勢を評価する、
走歩行評価方法である。
【発明の効果】
【0007】
本発明に従うと、走歩行時の対象者の状態をより精度よく評価することができるという効果がある。
【図面の簡単な説明】
【0008】
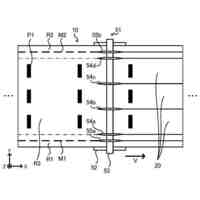
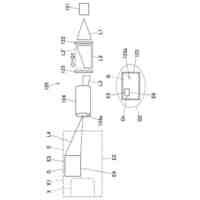
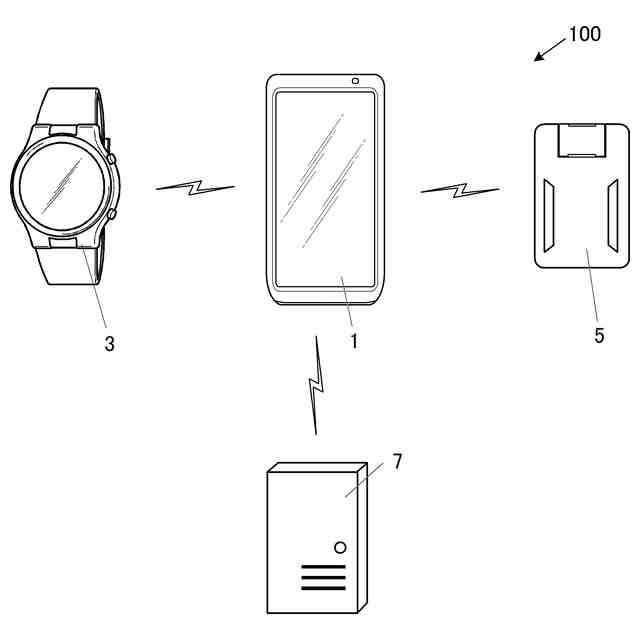
本実施形態の走歩行評価装置を含む走歩行評価システムの全体構成を説明する図である。
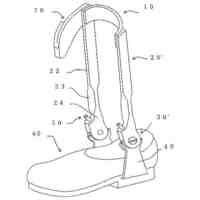
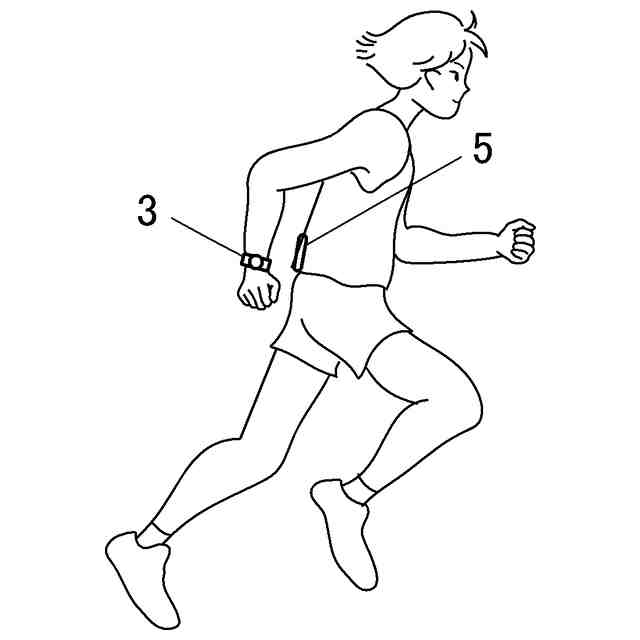
計測装置の装着位置を示す図である。
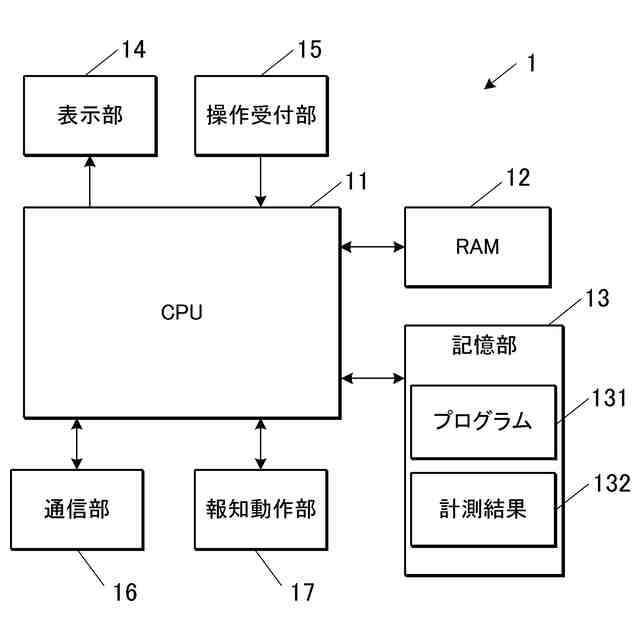
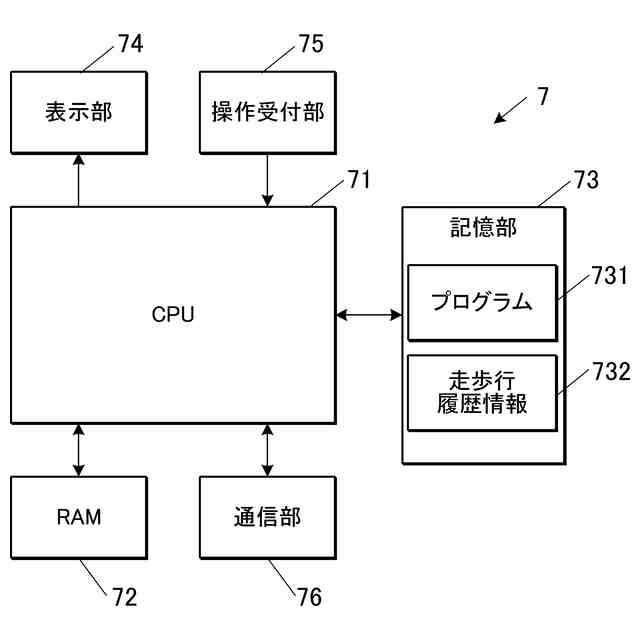
電子機器の機能構成を示すブロック図である。
サーバ装置の機能構成を示すブロック図である。
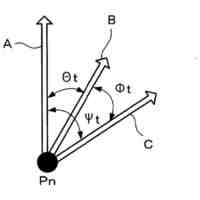
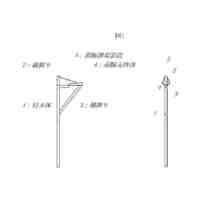
対象者の姿勢について説明する図である。
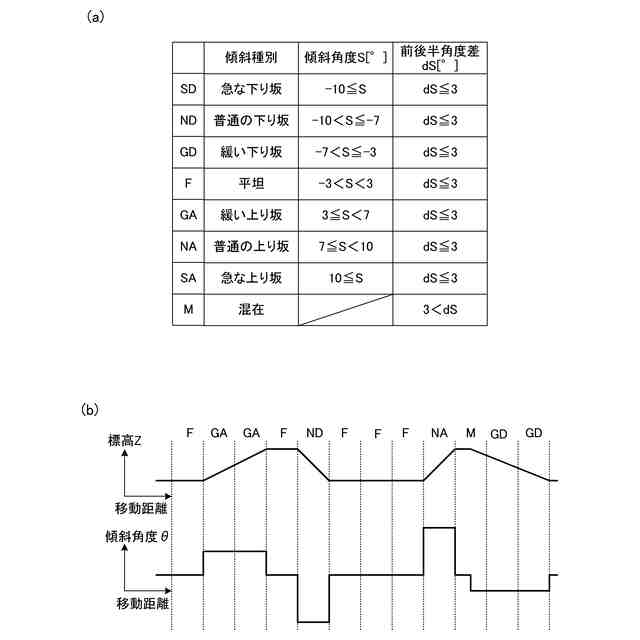
傾斜の分類について説明する図である。
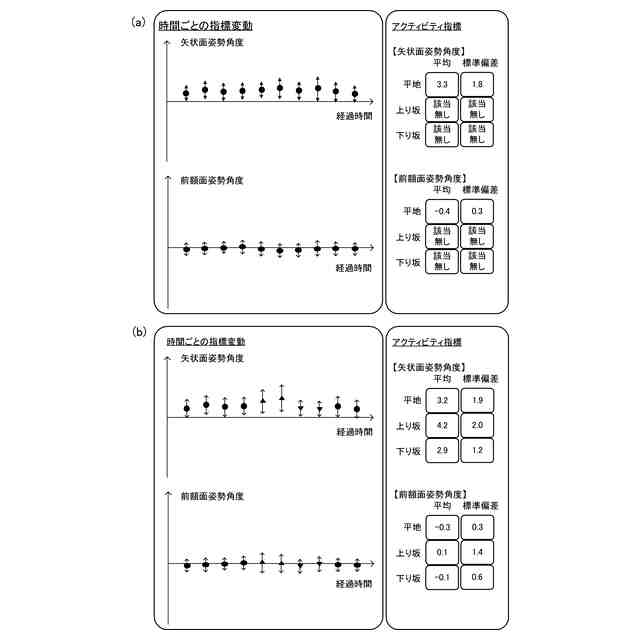
各間隔での解析結果の表示例を示す図である。
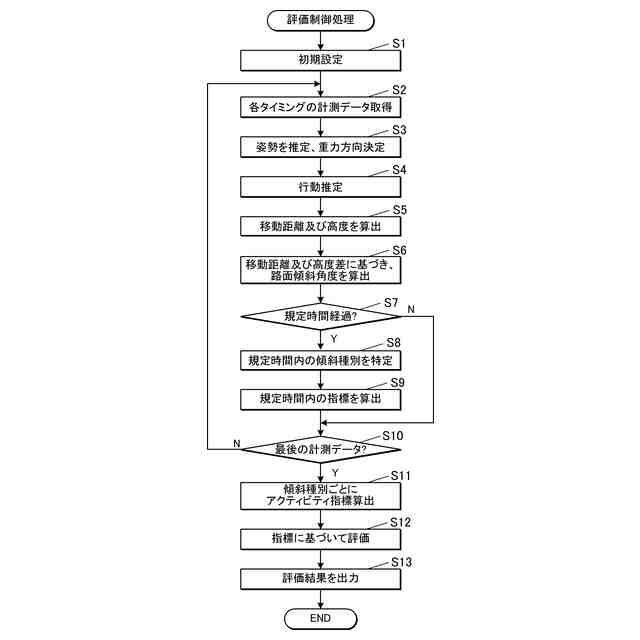
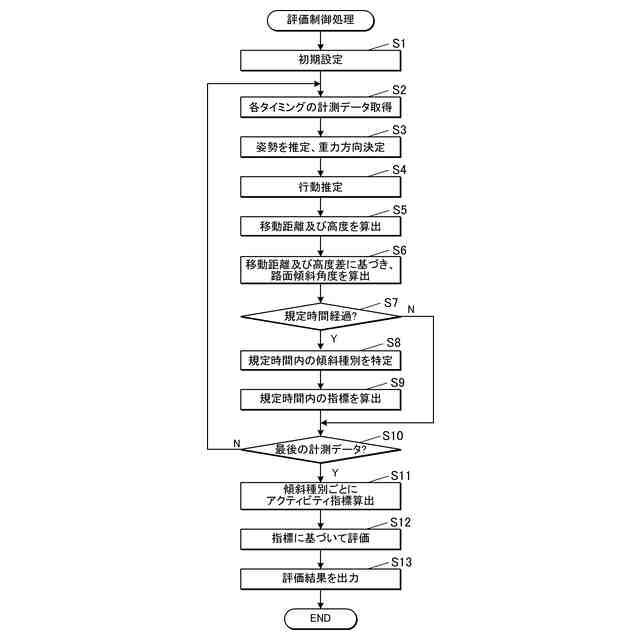
サーバ装置で実行される評価制御処理の制御手順を示すフローチャートである。
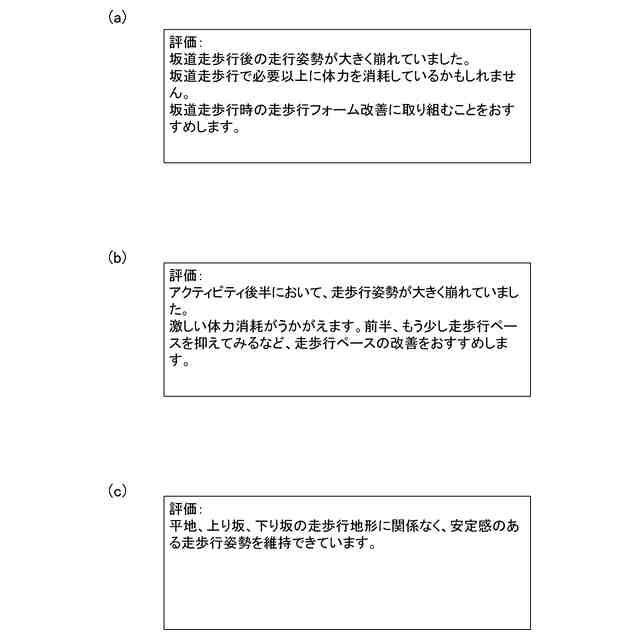
走歩行姿勢についての評価レポートの表示例を示す図である。
【発明を実施するための形態】
【0009】
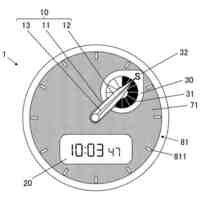
以下、本発明の実施の形態を図面に基づいて説明する。図1に示すように、本実施形態の走歩行評価システム100は、計測装置3、5、電子機器1及びサーバ装置7を含む。
【0010】
図2に示すように、計測装置3は、走行又は歩行を行う対象者(ユーザ)の腕に装着されるスマートウォッチ又は活動量計などであってもよい。計測装置3は、計測部及び通信部を有する。計測部は、高度変化を特定するための気圧センサと、対象者の走行状況又は歩行状況である走歩行状況を計測する加速度センサ、ジャイロセンサ及び方位センサなどを含む。方位センサは、地磁場を計測する磁場センサであってもよい。各センサの計測データは、例えば、1秒単位で得られてもよい。通信部は、電子機器1と通信接続された際に、計測結果を電子機器1へ送信する。計測装置3は、さらに衛星電波受信処理部を備えていてもよい。衛星電波受信処理部は、例えば、GNSS(Global Navigation Satellite System)に係る測位衛星からの電波を受信して、現在位置を特定する測位演算を実行する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カシオ計算機株式会社
光源装置及び投影装置
7日前
カシオ計算機株式会社
光源装置及び投影装置
7日前
カシオ計算機株式会社
電子時計及び電子時計本体
8日前
カシオ計算機株式会社
電子時計、外装部材及びバンド
8日前
カシオ計算機株式会社
発音装置及び音出力制御システム
7日前
カシオ計算機株式会社
時計、表示制御方法及びプログラム
8日前
カシオ計算機株式会社
テープ製造方法及びテープ製造システム
15日前
カシオ計算機株式会社
発音装置、接続装置及び音出力システム
7日前
カシオ計算機株式会社
位置推定装置、位置推定方法、プログラム
15日前
カシオ計算機株式会社
切断制御装置、切断制御方法及びプログラム
7日前
カシオ計算機株式会社
情報伝送システム、情報伝送方法及び電子機器
15日前
カシオ計算機株式会社
学習支援装置、学習支援方法およびプログラム
7日前
カシオ計算機株式会社
入力装置、電子楽器、設定方法及びプログラム
15日前
カシオ計算機株式会社
走歩行評価方法、走歩行評価装置及びプログラム
7日前
カシオ計算機株式会社
電子機器、電子機器の動作制御方法及びプログラム
8日前
カシオ計算機株式会社
投影装置、投影システム、投影方法及びプログラム
15日前
カシオ計算機株式会社
印刷データ圧縮方法、印刷データ転送方法、印刷データ圧縮装置、及び、プログラム
1日前
個人
健康器具
7か月前
個人
歯茎みが品
8か月前
個人
鼾防止用具
7か月前
個人
短下肢装具
2か月前
個人
白内障治療法
6か月前
個人
嚥下鍛錬装置
2か月前
個人
マッサージ機
7か月前
個人
脈波測定方法
7か月前
個人
脈波測定方法
7か月前
個人
洗井間専家。
6か月前
個人
前腕誘導装置
2か月前
個人
導電香
7か月前
個人
アイマスク装置
1か月前
個人
バッグ式オムツ
3か月前
個人
矯正椅子
4か月前
個人
片足歩行支援具
8か月前
個人
胸骨圧迫補助具
21日前
個人
歯の修復用材料
3か月前
個人
ホバーアイロン
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ