TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133353
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024031254
出願日
2024-03-01
発明の名称
位置推定装置、位置推定方法、プログラム
出願人
カシオ計算機株式会社
代理人
個人
,
個人
主分類
G01B
7/00 20060101AFI20250904BHJP(測定;試験)
要約
【課題】位置検出範囲が広い環境下であっても精度の高い位置推定を可能とする位置推定装置を提供する。
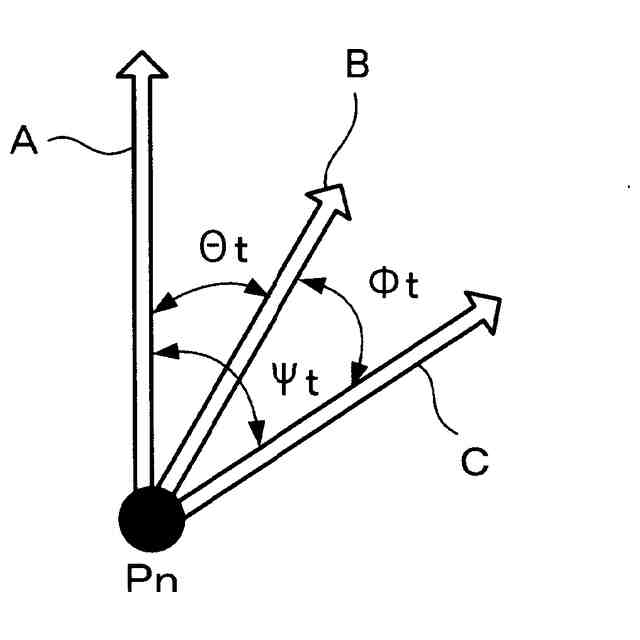
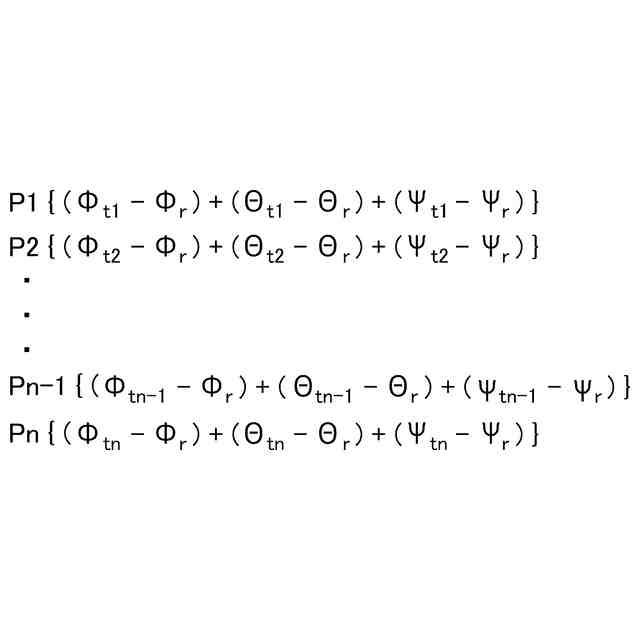
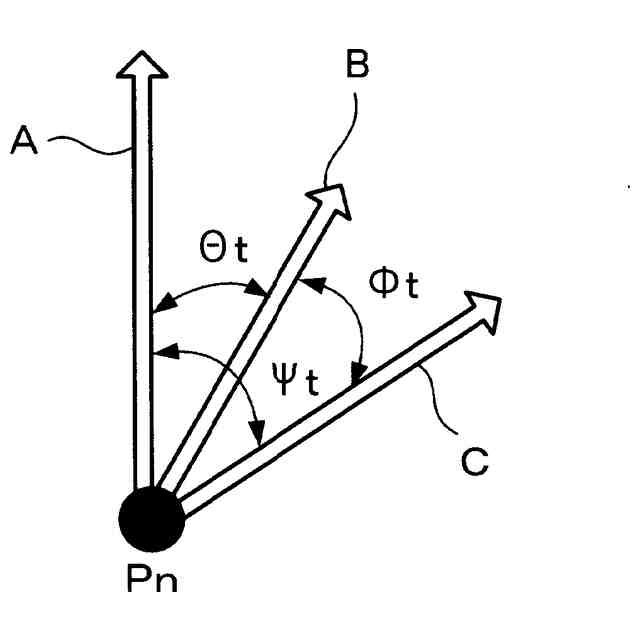
【解決手段】異なる位置に配置された複数の磁場生成手段に、1つずつ順に磁場を生成させ、1つずつ順に生成された各磁場の磁気ベクトル値であって磁気センサによって検出された磁気ベクトル値を取得し、各磁場の磁気ベクトル同士がなす角度であるベクトル角を、取得された磁気ベクトル値に基づいて導出し、各磁場が生成された座標空間の各位置において各磁場の磁気ベクトル同士がなすベクトル角の基準となる所定の基準ベクトル角Φt,Θt,Ψtと、導出しベクトル角との比較結果に基づいて、磁気センサの位置を推定する。
【選択図】図5
特許請求の範囲
【請求項1】
異なる位置に配置された複数の磁場生成手段に、1つずつ順に磁場を生成させる磁場制御手段と、
前記1つずつ順に生成された各磁場の磁気ベクトル値であって磁気センサによって検出された磁気ベクトル値を取得するベクトル値取得手段と、
前記各磁場の磁気ベクトル同士がなす角度であるベクトル角を、前記取得された磁気ベクトル値に基づいて導出する角度導出手段と、
前記各磁場が生成された座標空間の各位置において前記各磁場の磁気ベクトル同士がなすベクトル角の基準となる所定の基準ベクトル角と、前記導出されたベクトル角との比較結果に基づいて、前記磁気センサの位置を推定する位置推定手段と、
を備えることを特徴とする位置推定装置。
続きを表示(約 1,200 文字)
【請求項2】
前記ベクトル値取得手段は、前記各磁場の生成に先立ち前記磁気センサに磁場環境を示す磁気ベクトル値を取得させ、当該磁気ベクトル値に基づき前記各磁場の磁気ベクトルを補正し、
前記角度導出手段は、前記ベクトル値取得手段による補正後の前記各磁場の磁気ベクトル値から前記ベクトル角を取得する
ことを特徴とする請求項1記載の位置推定装置。
【請求項3】
前記磁気センサによって検出された前記各磁場のうちの任意の磁場の前記磁気ベクトル値と、前記各磁場が生成された各位置において、前記各磁場の磁気ベクトルの基準となる所定の基準磁気ベクトル値と、に基づいて前記磁気センサの姿勢を推定する姿勢推定手段、をさらに備えることを特徴とする請求項1又は請求項2のいずれか1項に記載の位置推定装置。
【請求項4】
前記磁場制御手段は、前記複数の磁場生成手段の各々に、磁界の向きが異なる二種類の磁場を生成させ、
前記ベクトル値取得手段は、前記複数の磁場生成手段の各々によって生成された前記二種類の磁場の各磁気ベクトル値であって前記磁気センサにそれぞれ検出された二種類の磁気ベクトル値の差分に基づいて、前記二種類の磁気ベクトル値の一方を補正し、
前記角度導出手段は、前記ベクトル値取得手段による補正後の磁気ベクトル値に基づいて前記ベクトル角を導出する、
ことを特徴とする請求項1記載の位置推定装置。
【請求項5】
異なる位置に配置された複数の磁場生成手段に、1つずつ順に磁場を生成させ、
前記1つずつ順に生成された各磁場の磁気ベクトル値であって磁気センサによって検出された磁気ベクトル値を取得し、
前記各磁場の磁気ベクトル同士がなす角度であるベクトル角を、前記取得された磁気ベクトル値に基づいて導出し、
前記各磁場が生成された座標空間の各位置において前記各磁場の磁気ベクトル同士がなすベクトル角の基準となる所定の基準ベクトル角と、前記導出されたベクトル角との比較結果に基づいて、前記磁気センサの位置を推定する、
位置推定方法。
【請求項6】
コンピュータに実行されるプログラムであって、
異なる位置に配置された複数の磁場生成手段に、1つずつ順に磁場を生成させる処理と、
前記1つずつ順に生成された各磁場の磁気ベクトル値であって磁気センサによって検出された磁気ベクトル値を取得する処理と、
前記各磁場の磁気ベクトル同士がなす角度であるベクトル角を、前記取得された磁気ベクトル値に基づいて導出する処理と、
前記各磁場が生成された座標空間の各位置において前記各磁場の磁気ベクトル同士がなすベクトル角の基準となる所定の基準ベクトル角と、前記導出したベクトル角との比較結果に基づいて、前記磁気センサの位置を推定する処理と、
を実現させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えばモーションキャプチャーに用いられる位置推定装置、位置推定方法、プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、人体等の動きをセンシングするための位置検出装置として、例えば特許文献1には、外部磁場の変化を検出可能な磁気センサと、磁気センサに対する相対的な位置を変化させ得る磁場発生部(例えば磁石)とを備え、磁気センサから外部磁場の変化に応じて出力されるセンサ信号に基づき、磁気センサの位置を取得する磁気式の位置検出装置が記載されている。係る装置においては、口内につけた磁場ソースと舌につけた磁気センサの正確な絶対位置を計測することで舌の位置が把握可能となっている。
【先行技術文献】
【特許文献】
【0003】
特開2013-34510号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
磁気式の位置検出装置は、モーションキャプチャー等において用いられる光学式や慣性式といった他の方式のものに比べて、遮蔽物などの物理的要因、ドリフト量などの影響による環境要因などによる誤差が少ないため、位置検出精度が相対的に高い。しかしながら、従来の技術では、発生させた磁場と磁気センサの単一の距離を測定するために、検出結果が磁力の強さや障害物に影響されることや、位置を検出可能な範囲が狭いなどの課題があった。
【0005】
以上を踏まえ、本発明は、位置検出範囲が広い環境下であっても精度の高い位置推定ができる位置推定装置、位置推定方法、プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る位置推定装置は、異なる位置に配置された複数の磁場生成手段に、1つずつ順に磁場を生成させる磁場制御手段と、前記1つずつ順に生成された各磁場の磁気ベクトル値であって磁気センサによって検出された磁気ベクトル値を取得するベクトル値取得手段と、前記各磁場の磁気ベクトル同士がなす角度であるベクトル角を、前記取得された磁気ベクトル値に基づいて導出する角度導出手段と、前記各磁場が生成された座標空間の各位置において前記各磁場の磁気ベクトル同士がなすベクトル角の基準となる所定の基準ベクトル角と、前記導出されたベクトル角との比較結果に基づいて、前記磁気センサの位置を推定する位置推定手段と、を備える。
【0007】
この発明に係る位置推定方法では、異なる位置に配置された複数の磁場生成手段に、1つずつ順に磁場を生成させ、前記1つずつ順に生成された各磁場の磁気ベクトル値であって磁気センサによって検出された磁気ベクトル値を取得し、前記各磁場の磁気ベクトル同士がなす角度であるベクトル角を、前記取得された磁気ベクトル値に基づいて導出し、前記各磁場が生成された座標空間の各位置において前記各磁場の磁気ベクトル同士がなすベクトル角の基準となる所定の基準ベクトル角と、前記導出されたベクトル角との比較結果に基づいて、前記磁気センサの位置を推定する。
【0008】
この発明に係るプログラムは、コンピュータに実行されるプログラムであって、異なる位置に配置された複数の磁場生成手段に、1つずつ順に磁場を生成させる処理と、前記1つずつ順に生成された各磁場の磁気ベクトル値であって磁気センサによって検出された磁気ベクトル値を取得する処理と、前記各磁場の磁気ベクトル同士がなす角度であるベクトル角を、前記取得された磁気ベクトル値に基づいて導出する処理と、前記各磁場が生成された座標空間の各位置において前記各磁場の磁気ベクトル同士がなすベクトル角の基準となる所定の基準ベクトル角と、前記導出したベクトル角との比較結果に基づいて、前記磁気センサの位置を推定する処理と、を実現させる。
【発明の効果】
【0009】
本発明によれば、位置検出範囲が広い環境下であっても精度の高い位置推定ができる。
【図面の簡単な説明】
【0010】
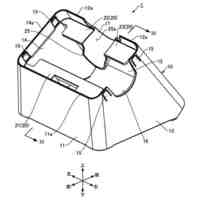
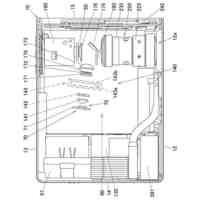
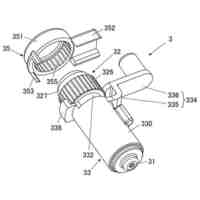
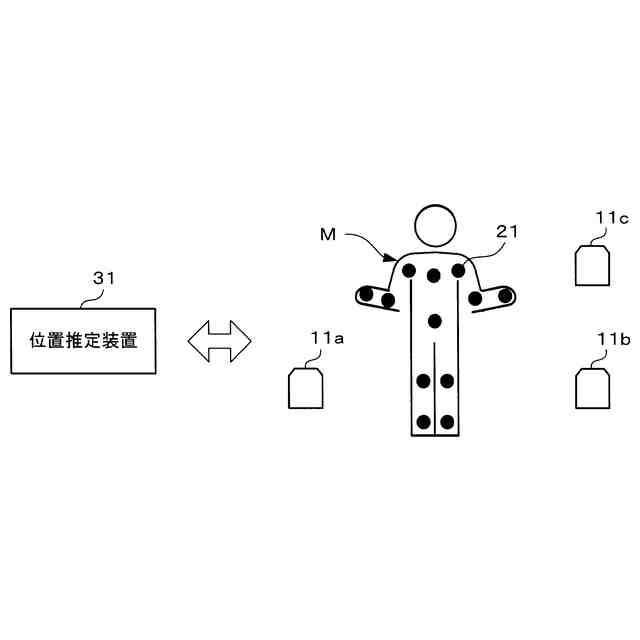
本発明の一実施形態に係るモーションキャプチャー装置を示す図である。
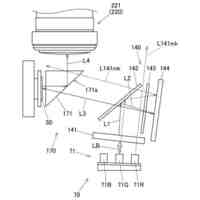
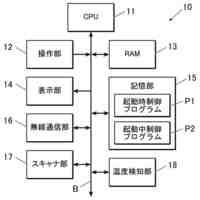
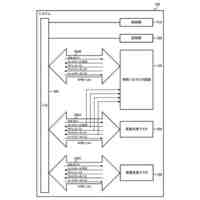
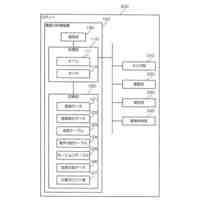
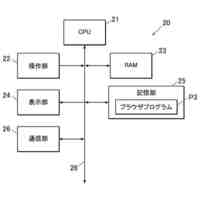
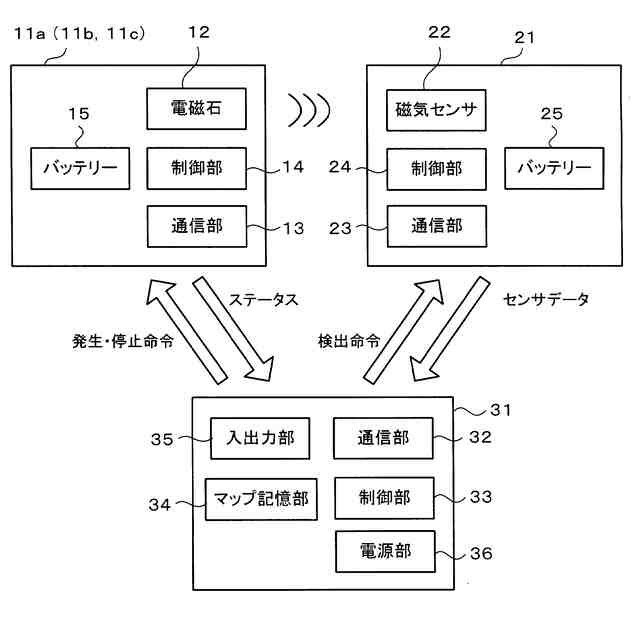
図1に示したモーションキャプチャー装置の概略構成を示すブロック図である。
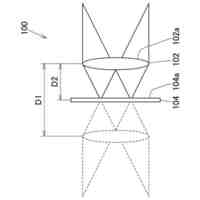
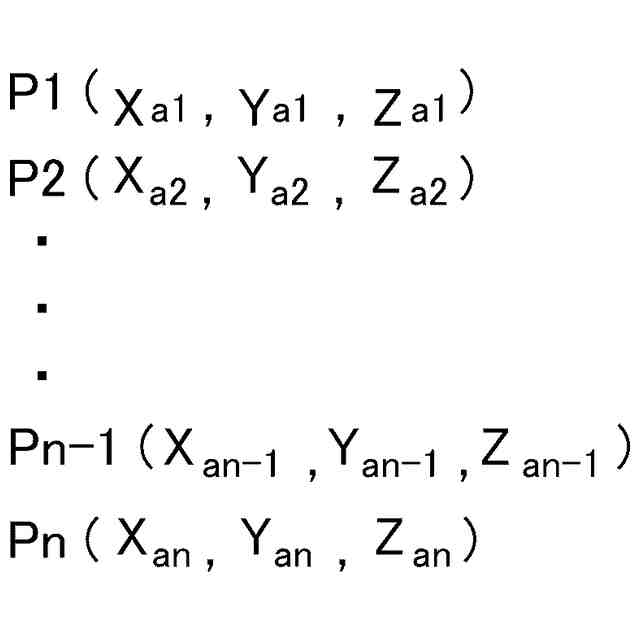
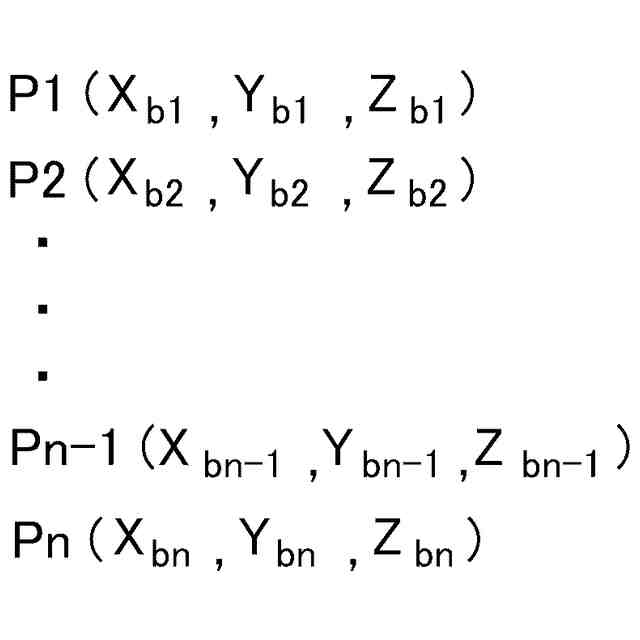
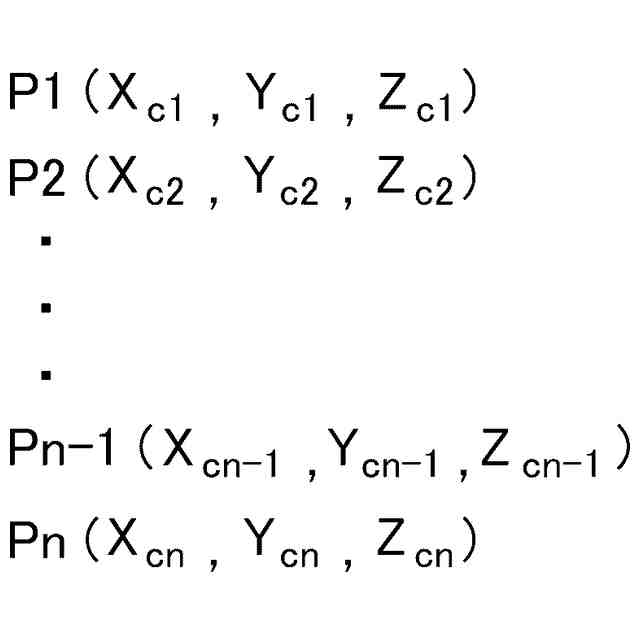
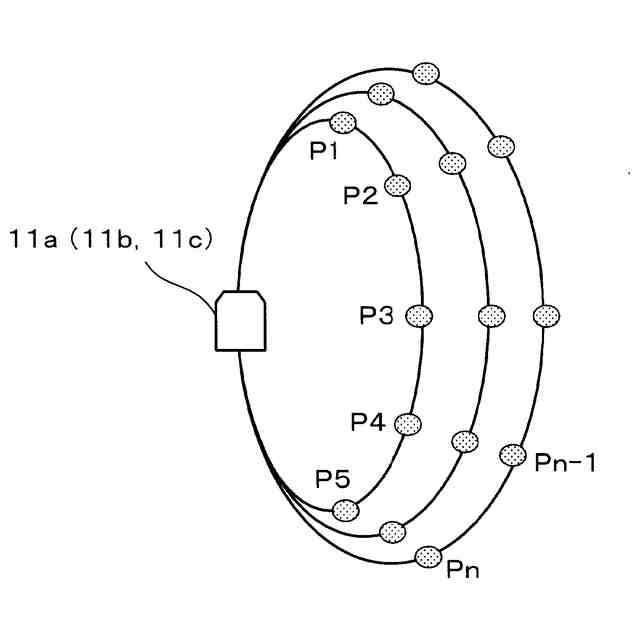
磁気ベクトルを取得する磁場生成ユニットを基準とした座標位置を示す図である。
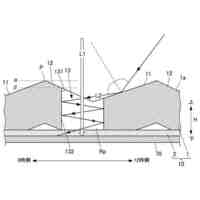
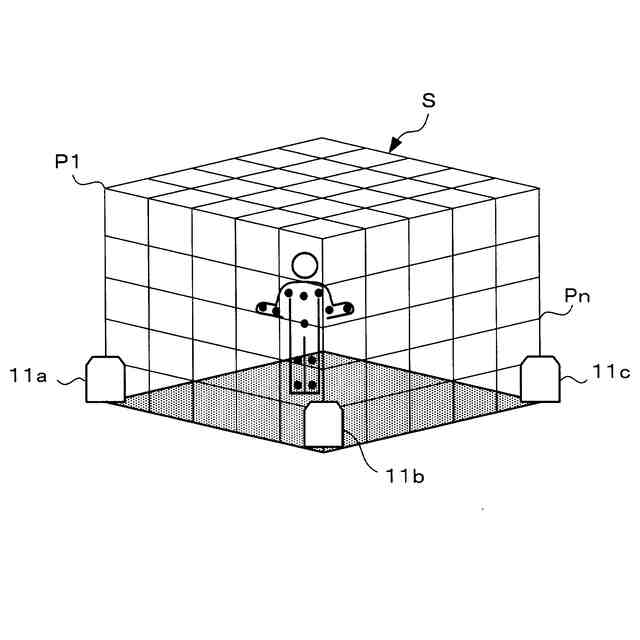
複数の磁場生成ユニットが配置された座標空間を示す図である。
3つの磁場の磁気ベクトルとベクトル角を示す図である。
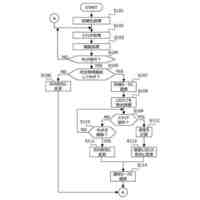
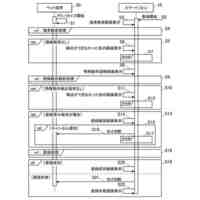
位置推定装置における位置推定動作を説明するためのフローチャートである。
姿勢を推定する際の磁気ベクトルの一例を示す図である。
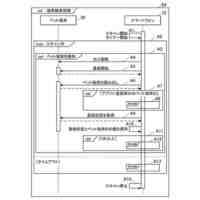
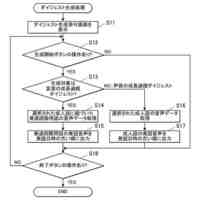
位置推定装置における位置推定動作の変形例を説明するためのフローチャートである。
地磁気成分が除去された磁気ベクトルの計算手順の一例を示す図である。
図1に示したモーションキャプチャー装置の変形例を示すブロック図である。
図1に示したモーションキャプチャー装置の変形例を示すブロック図である。
図1に示したモーションキャプチャー装置の変形例を示すブロック図である。
図1に示したモーションキャプチャー装置の変形例を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カシオ計算機株式会社
支持台
3日前
カシオ計算機株式会社
減音器具
5日前
カシオ計算機株式会社
減音器具
5日前
カシオ計算機株式会社
電子鍵盤楽器
3日前
カシオ計算機株式会社
装飾板及び時計
4日前
カシオ計算機株式会社
光源装置及び投影装置
17日前
カシオ計算機株式会社
光源装置及び投影装置
17日前
カシオ計算機株式会社
光源装置及び投影装置
5日前
カシオ計算機株式会社
光源装置及び投影装置
5日前
カシオ計算機株式会社
端末装置及びプログラム
5日前
カシオ計算機株式会社
外装部品ユニット及び時計
3日前
カシオ計算機株式会社
電子時計及び電子時計本体
18日前
カシオ計算機株式会社
電子機器、及び表示制御方法
7日前
カシオ計算機株式会社
カッターユニット及び切断装置
3日前
カシオ計算機株式会社
電子時計、外装部材及びバンド
18日前
カシオ計算機株式会社
補助バスマスタ回路及び電子機器
7日前
カシオ計算機株式会社
制御装置、方法およびプログラム
7日前
カシオ計算機株式会社
演奏装置、方法およびプログラム
4日前
カシオ計算機株式会社
制御装置、方法およびプログラム
7日前
カシオ計算機株式会社
発音装置及び音出力制御システム
17日前
カシオ計算機株式会社
演奏装置、方法およびプログラム
5日前
カシオ計算機株式会社
ロボット、及びロボットの製造方法
3日前
カシオ計算機株式会社
情報処理装置、方法およびプログラム
3日前
カシオ計算機株式会社
外装部品、外装部品ユニット及び時計
3日前
カシオ計算機株式会社
制御装置、制御方法、及びプログラム
4日前
カシオ計算機株式会社
電子機器、登録処理方法及びプログラム
3日前
カシオ計算機株式会社
プログラム、電子機器及び登録処理方法
3日前
カシオ計算機株式会社
発音装置、接続装置及び音出力システム
17日前
カシオ計算機株式会社
情報処理装置、表示方法、及びプログラム
7日前
カシオ計算機株式会社
切断制御装置、切断制御方法及びプログラム
17日前
カシオ計算機株式会社
音声提供装置、音声提供方法及びプログラム
3日前
カシオ計算機株式会社
情報処理装置、プログラム及び情報処理方法
3日前
カシオ計算機株式会社
情報提供装置、情報提供方法及びプログラム
5日前
カシオ計算機株式会社
電子時計、電子時計の制御方法及びプログラム
7日前
カシオ計算機株式会社
学習支援装置、学習支援方法およびプログラム
17日前
カシオ計算機株式会社
電子機器、電子機器の制御方法及びプログラム
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ