TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025132078
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029411
出願日
2024-02-29
発明の名称
人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システム及び運転制御方法
出願人
UBEマシナリー株式会社
代理人
個人
,
個人
主分類
E02B
5/08 20060101AFI20250903BHJP(水工;基礎;土砂の移送)
要約
【課題】除塵装置にクラゲが襲来しても効率的に除塵装置を運転制御できる人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システム及び運転制御方法を提供する。
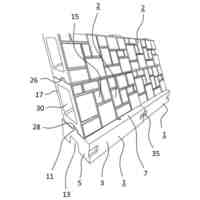
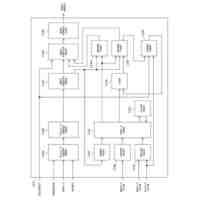
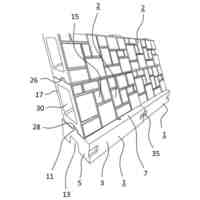
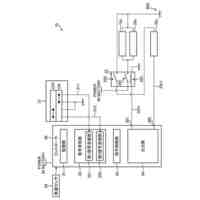
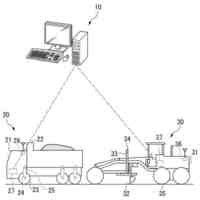
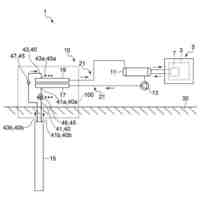
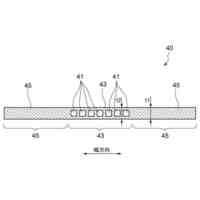
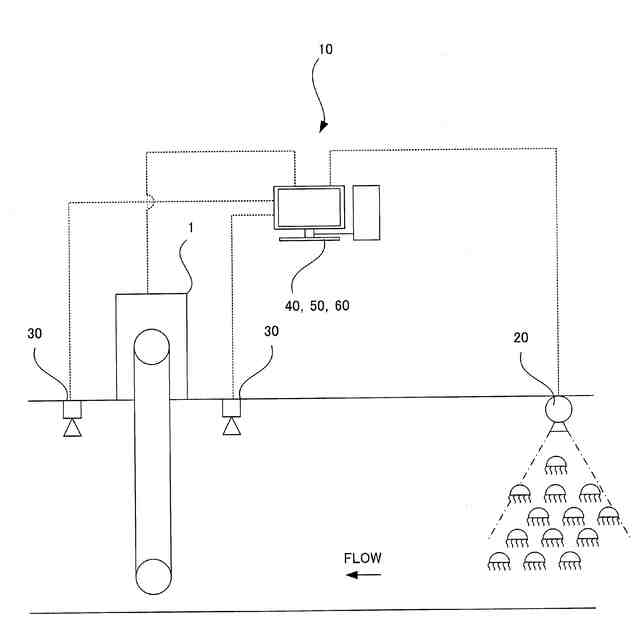
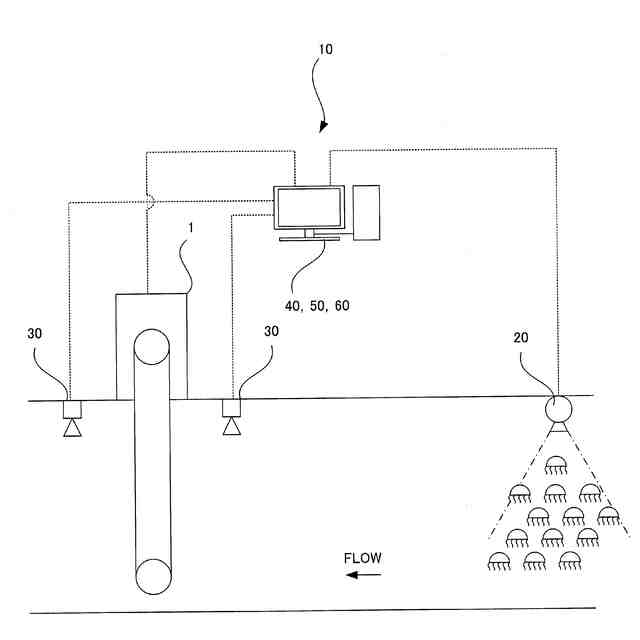
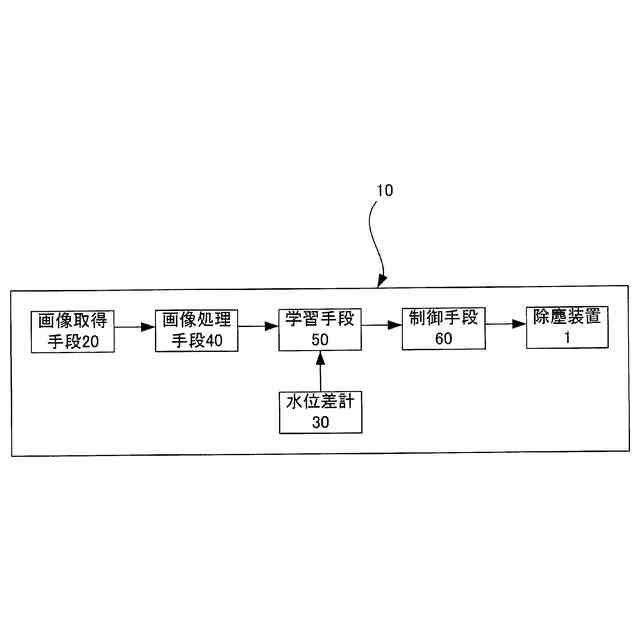
【解決手段】本発明の人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システム10は、除塵装置よりも上流の取水路上に配置して水中を撮像する画像取得手段20と、
水中を撮像して得られた画像を画像解析プログラムにより画像データ化して画像中の前記クラゲを人工知能により認識する画像処理手段40と、
除塵装置前後の水位差を測定する水位差計30と、
前記画像処理手段で前記クラゲを検出したとき、および前記水位差計の測定値が設定値を超えたときに前記クラゲの襲来に追従して前記除塵装置を稼働させる制御手段60を備えたことを特徴としている。
【選択図】 図1
特許請求の範囲
【請求項1】
除塵装置よりも上流の取水路上に配置して水中を撮像する画像取得手段と、
水中を撮像して得られた画像を画像解析プログラムにより画像データ化して人工知能により画像中の影の面積率とその後の水位差の変化の相関からクラゲと認識する画像処理手段と、
除塵装置前後の水位差を測定する水位差計と、
前記画像処理手段で前記クラゲを検出したとき、および前記水位差計の測定値が設定値を超えたときに前記クラゲの襲来に追従して前記除塵装置を稼働させる制御手段を備えたことを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システム。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載された人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システムであって、
前記画像取得手段は水中で音波を発信して前記クラゲを検知するソナーを用いたことを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システム。
【請求項3】
請求項1又は2に記載された人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システムであって、
前記画像処理手段の画像認識と、前記除塵装置の運転状況、前記水位差計の水位差を人工知能により学習して運転制御の設定値を変更する学習手段を備えたことを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システム。
【請求項4】
水中を撮像して得られた画像を用いて、コンピュータに組み込まれた画像解析プログラム及び人工知能による検出結果からクラゲ襲来予測に基づく除塵装置の運転制御方法であって、
コンピュータが、水中の画像を取得する画像取得ステップと、
コンピュータが、前記画像を画像解析プログラムにより画像データ化して人工知能により画像中の影の面積率とその後の水位差の変化の相関からクラゲを検出するクラゲ検出ステップと、
コンピュータが、経時変化する画像データから人口知能によりクラゲの増加を予測する増加予測ステップと、
コンピュータが、除塵装置前後の水位差を取得する水位差取得ステップと、
コンピュータが、前記クラゲ検出ステップで前記クラゲを検出したとき、および前記水位差取得ステップの測定値が設定値を超えたときに前記クラゲの襲来に追従して前記除塵装置を稼働させる運転制御ステップを備えたことを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御方法。
【請求項5】
請求項4に記載された人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御方法であって、
前記画像取得ステップで取得する画像は、ソナーで水中に音波を発信して前記クラゲを検知した画像であることを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御方法。
【請求項6】
請求項4又は5に記載された人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御方法であって、
コンピュータが、前記クラゲ検出ステップの画像認識と、前記除塵装置の運転状況、前記水位差取得ステップの水位差を人工知能により学習して前記運転制御ステップの設定値を変更する学習ステップを備えたことを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、工業用水を取水するための水路に設置した除塵装置の人工知能を活用したクラゲ襲来予測に基づく運転制御システム及び運転制御方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
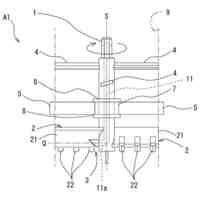
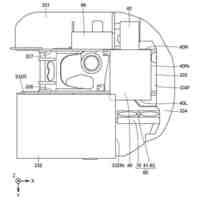
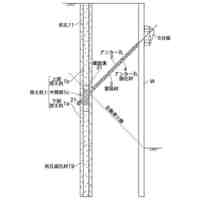
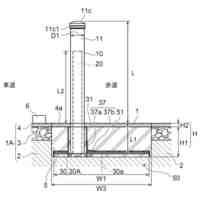
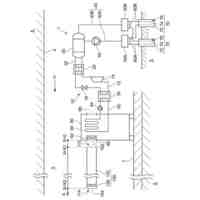
発電所などのプラント設備の工業用水利用先において、冷却水や工業用水を取水するための水路に除塵装置を設置している。この除塵装置は海、河川、池などの取水口に流入するクラゲや塵芥などの異物を取り除くために機能している。取水量を多く要する発電所等では、回転式網枠のスクリーンを上下に回動し連続的に塵芥を絡め捕ることでスクリーンが目詰まりすることなく除塵できる構造を採用している。
【0003】
従来の除塵装置の運転制御は、除塵装置前後の水位差を測定して、例えば、水位差が200mmを超えると低速運転、水位差が500mmを超えると高速で運転し塵芥を捕集処理している(特許文献1の従来技術)。
このような除塵装置の設置場所において海水を取水する場合、クラゲが突然大量発生することがある。除塵装置の処理能力を上回ると発電所などの取水量を減らさなければならず、望ましくない処置を行わなければならなかった。このため、事前にクラゲの大量発生を予測できれば、除塵装置の効率的な運転が可能で、取水量を減らすことなく、また除塵装置の連続運転による過剰負荷を回避できることが期待できる。従来のカメラによる監視では水面しか見えず水中のクラゲを把握することができない。このため、クラゲの襲来時期となる夏場はクラゲの有無とは関係なく作業員の操作で装置を連続運転していたため、長期的な負荷による装置の経年劣化が問題となっていた。
【先行技術文献】
【特許文献】
【0004】
特開平5-321228号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、上記従来技術の問題点に鑑み、除塵装置にクラゲが襲来しても効率的に除塵装置を運転制御できる人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システム及び運転制御方法を提供する。
【課題を解決するための手段】
【0006】
本発明は、上記課題を解決するための第1の手段として、除塵装置よりも上流の取水路上に配置して水中を撮像する画像取得手段と、
水中を撮像して得られた画像を画像解析プログラムにより画像データ化して人工知能により画像中の影の面積率とその後の水位差の変化の相関からクラゲと認識する画像処理手段と、
除塵装置前後の水位差を測定する水位差計と、
前記画像処理手段で前記クラゲを検出したとき、および前記水位差計の測定値が設定値を超えたときに前記クラゲの襲来に追従して前記除塵装置を稼働させる制御手段を備えたことを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システムを提供することにある。
上記第1の手段によれば、クラゲの発生を検知して襲来に追従するように除塵装置を効率的に低速又は高速運転制御しているので、連続運転を回避して長期的な負荷による装置の経年劣化を低減できる。
【0007】
本発明は、上記課題を解決するための第2の手段として、第1の手段において、前記画像取得手段は水中で音波を発信して前記クラゲを検知するソナーを用いたことを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システムを提供することにある。
上記第2の手段によれば、水面に限らず水中のクラゲを検出することができる。
【0008】
本発明は、上記課題を解決するための第3の手段として、第1又は第2の手段において、前記画像処理手段の画像認識と、前記除塵装置の運転状況、前記水位差計の水位差を人工知能により学習して運転制御の設定値を変更する学習手段を備えたことを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御システムを提供することにある。
上記第3の手段によれば、除塵装置の運転開始の設定値を除塵装置が効率的に運転、換言すると連続運転によらず、低速又は高速の運転切替によって大量の塵芥を捕集できる値に設定できる。
【0009】
本発明は、上記課題を解決するための第4の手段として、水中を撮像して得られた画像を用いて、コンピュータに組み込まれた画像解析プログラム及び人工知能による検出結果からクラゲ襲来予測に基づく除塵装置の運転制御方法であって、
コンピュータが、水中の画像を取得する画像取得ステップと、
コンピュータが、前記画像を画像解析プログラムにより画像データ化して人工知能により画像中の影の面積率とその後の水位差の変化の相関からクラゲを検出するクラゲ検出ステップと、
コンピュータが、経時変化する画像データから人口知能によりクラゲの増加を予測する増加予測ステップと、
コンピュータが、除塵装置前後の水位差を取得する水位差取得ステップと、
コンピュータが、前記クラゲ検出ステップで前記クラゲを検出したとき、および前記水位差取得ステップの測定値が設定値を超えたときに前記クラゲの襲来に追従して前記除塵装置を稼働させる運転制御ステップを備えたことを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御方法を提供することにある。
上記第4の手段によれば、クラゲの発生を検知して襲来に追従するように除塵装置を効率的に低速又は高速運転制御しているので、連続運転を回避して長期的な負荷による装置の経年劣化を低減できる。
【0010】
本発明は、上記課題を解決するための第5の手段として、第4の手段において、前記画像取得ステップで取得する画像は、ソナーで水中に音波を発信して前記クラゲを検知した画像であることを特徴とする人工知能を活用したクラゲ襲来予測に基づく除塵装置の運転制御方法を提供することにある。
上記第5の手段によれば、水面に限らず水中のクラゲを検出することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社武井工業所
積みブロック
5日前
日立建機株式会社
作業機械
3日前
株式会社フジタ
掘削機
4日前
有限会社 櫂設計事務所
掘削・撹拌具
11日前
株式会社武井工業所
積みブロック用基礎ブロック
5日前
株式会社小松製作所
作業機械
5日前
株式会社トラバース
地盤改良ユニット及び地盤改良機
4日前
JFEスチール株式会社
モノパイル
13日前
株式会社小松製作所
作業機械
12日前
コベルコ建機株式会社
作業機械
9日前
株式会社小松製作所
路面整備システム
4日前
豊国工業株式会社
膜状起伏ゲート
4日前
ヤンマーホールディングス株式会社
作業機械
4日前
ウチノ看板株式会社
ポール工作物及びポール工作物の設置方法
6日前
株式会社コマツレンタル宮崎
スクレーパ
6日前
UBEマシナリー株式会社
除塵装置および除塵方法
6日前
日本車輌製造株式会社
建設機械及び建設機械の稼働管理システム
6日前
五洋建設株式会社
泥土と製鋼スラグとの混合方法およびシステム
3日前
日鉄建材株式会社
排水パイプ、排水パイプ用端末材、及び擁壁排水構造
11日前
東急建設株式会社
控え杭と緊張材の結合方法及び山留め構造
6日前
株式会社前川製作所
ヘッダ装置
4日前
JFE建材株式会社
堰堤
5日前
キャタピラー エス エー アール エル
作業支援装置および作業機械
17日前
鹿島建設株式会社
支保工の支持構造およびスラブの構築方法
13日前
株式会社サンポール
格子状構造体、基礎構造装置および支柱の設置方法
17日前
株式会社ワイビーエム
高圧水ジェットポンプ
5日前
JFE建材株式会社
捕捉体及び堰堤
13日前
キャタピラー エス エー アール エル
建設機械の油圧回路
18日前
株式会社前川製作所
凍結管及び土壌凍結方法
4日前
有限会社神政興業
杭のカゴ筋、その製造方法、余盛内構造の設置方法、並びに杭頭処理方法
13日前
株式会社東洋スタビ
作業機械および作業機械の制御方法
16日前
株式会社前川製作所
排気装置及び地盤凍結システム
4日前
日本製鉄株式会社
鋼管の連結構造および連結方法
13日前
株式会社前川製作所
送風装置及び地盤凍結システム
4日前
株式会社前川製作所
地盤解凍方法及び地盤解凍装置
4日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
11日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ