TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127416
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024066447
出願日
2024-04-16
発明の名称
3次元形状計測方法
出願人
株式会社レイマック
代理人
個人
主分類
G01B
11/25 20060101AFI20250825BHJP(測定;試験)
要約
【課題】画素ごとに位相-座標テーブルを参照して位相シフト法を用いた高速な3次元形状計測が可能な3次元形状計測方法を提供する。
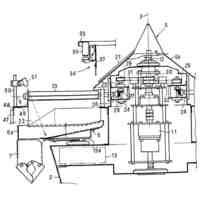
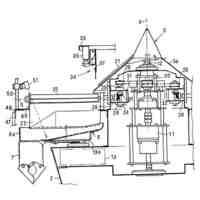
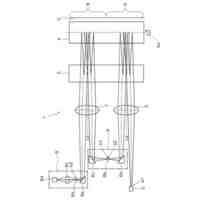
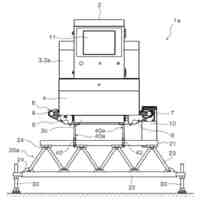
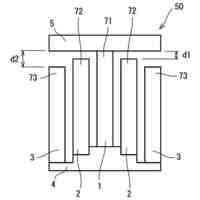
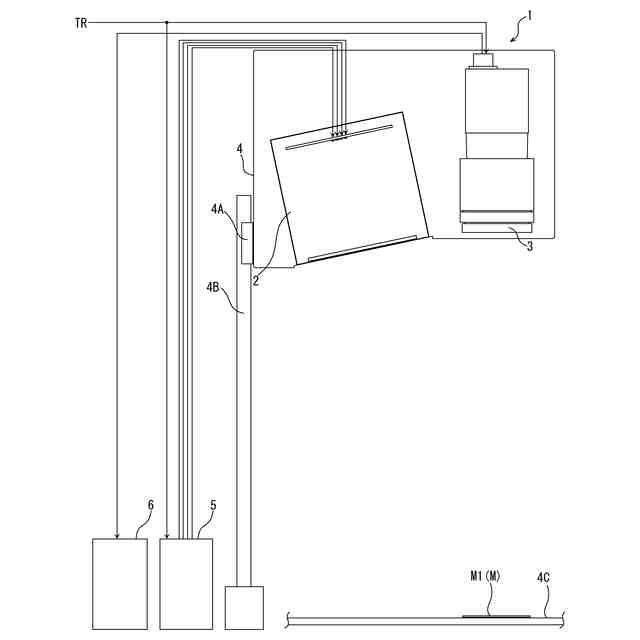
【解決手段】この3次元形状計測方法は、投影部2と所定個の画素を有し物品Mを撮影して撮影画像を得る撮影部3と支持体4とを備える3次元計測装置1を用いて、校正時には、z軸方向の各位置において、位相シフト法を用いて画素ごとの位相値を導出しその位相値とz軸座標値を1対1で対応付けた位相-座標テーブルを作成し、かつ、ピンホールカメラモデルのカメラパラメータを校正し、3次元形状計測時には、撮影画像から位相シフト法を用いて画素ごとの位相値を導出し、その位相値に対応するz軸座標値を位相-座標テーブルを参照して導出し、かつ、校正したカメラパラメータのピンホールカメラモデルにより画素ごとにz軸座標値に対応するx軸、y軸座標値を算出することにより、該計測物品の3次元形状の計測を行う。
【選択図】図8
特許請求の範囲
【請求項1】
順次所定角度ずつ位相がシフトした縞パターンを物品に投影する投影部と、
所定個の画素を有し前記物品を撮影して撮影画像を得る撮影部と、
前記投影部と前記撮影部が固定される支持体と、
を備える3次元計測装置を用いて、
校正時には、
任意の箇所のx軸、y軸座標値が特定可能な2次元パターンが表示される表面と無地の表面を切り換えることができる校正用物品を前記物品として用い、
前記支持体又は前記校正用物品が所定のz軸方向の複数個の位置に移動した各位置において、前記縞パターンの各々が前記校正用物品の前記無地の表面に投影された1組の前記撮影画像から位相シフト法を用いて前記画素ごとの位相値を導出しその位相値とz軸座標値を1対1で対応付けた位相-座標テーブルを作成し、
複数個の位置において、前記校正用物品の前記2次元パターンが表示される表面の撮影画像上で複数個の座標値抽出点のX軸、Y軸座標値を抽出し、
前記複数個の座標値抽出点のX軸、Y軸座標値とピンホールカメラモデルで算出したX軸、Y軸座標値の誤差を小さくするように、該ピンホールカメラモデルのカメラパラメータを変数とする反復法を行うことによって該カメラパラメータを校正し、
3次元形状計測時には、
計測物品を前記物品として用い、
前記支持体の前記z軸方向の位置を固定して、前記縞パターンの各々が投影された前記計測物品の1組の前記撮影画像から位相シフト法を用いて前記画素ごとの位相値を導出し、その位相値に対応するz軸座標値を前記位相-座標テーブルを参照して導出し、かつ、校正した前記カメラパラメータの前記ピンホールカメラモデルにより前記画素ごとにz軸座標値に対応するx軸、y軸座標値を算出することにより、該計測物品の3次元形状の計測を行う3次元形状計測方法。
続きを表示(約 550 文字)
【請求項2】
請求項1に記載の3次元形状計測方法において、
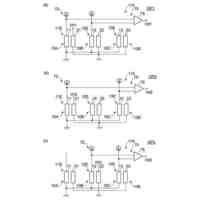
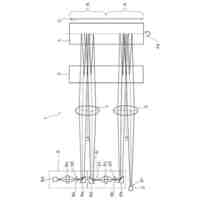
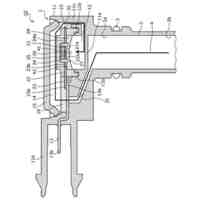
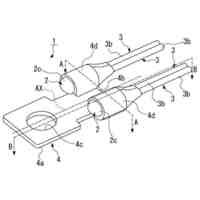
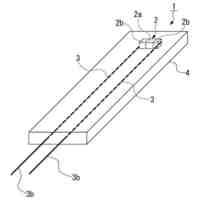
前記投影部は、各々の点灯及び光の放射強度が制御され一列に並んだ複数個の光源及びそれらからの光を縞パターンにして通過させる縞パターン形成光学素子を有し、前記複数個の光源の各々が順次点灯することにより順次所定角度ずつ位相がシフトした縞パターンを物品に投影し、
前記校正時と前記3次元形状計測時には、z軸方向を略鉛直方向とする3次元形状計測方法。
【請求項3】
請求項1又は2に記載の3次元形状計測方法において、
前記校正用物品は、前記2次元パターンが表示される表面と前記無地の表面をスライドさせて切り換えることができる平板、又は任意の箇所のx軸、y軸座標値が特定可能な2次元パターンが表示される表面の平板と無地の表面の平板を切り換えることができるもの、又は任意の箇所のx軸、y軸座標値が特定可能な2次元パターンが表示される表面と無地の表面を表裏に有する平板、である3次元形状計測方法。
【請求項4】
請求項2に記載の3次元形状計測方法において、
前記校正用物品は、物品検査ラインに配置されており、前記計測物品は、該物品検査ラインに配置されている3次元形状計測方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位相シフト法を用いた3次元形状計測方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
物品の3次元形状を非接触で計測するものとして、位相シフト法を用いた3次元形状計測方法が知られている。この3次元形状計測方法では、正弦波状に変化する縞パターンを物品の表面に投影部で投影しそれを撮影部で撮影するプロセスを、順次縞パターンの位相を所定角度(例えば、π/2或いは2π/3など)ずつシフトさせて1組(例えば、4枚或いは3枚など)の撮影画像を得る。そして、1組の撮影画像の画像処理を行って画素ごとに位相値を導出しその位相値に対応する3次元座標値を導出することにより、物品の3次元形状の計測が行われる。
【0003】
このような3次元形状計測方法の中には、特許文献1や特許文献2などに開示されているように、校正(キャリブレーション)時に撮影画像の画素ごとに位相値に対応する3次元座標値を示す位相-座標テーブルを作成しておいて、3次元形状計測時に位相シフト法などにより画素ごとに位相値を求め位相-座標テーブルを参照して3次元座標値を求めることで、3次元形状計測時に高精度で高速な計測を可能にするものが知られている。この位相-座標テーブルは、2次元格子など任意の箇所のx軸、y軸座標値が特定可能な2次元パターンが表示される基準平板をz軸方向(基準平板の法線方向)に少しずつ移動させ、z軸方向の各位置において撮影画像の画素ごとのx軸、y軸座標値を求め、更に位相シフト法などにより位相値を求めることで、画素ごとに位相値と3次元座標値(x軸、y軸、z軸座標値)を1対1で対応付けたものとすることができる。
【0004】
なお、上記投影部については、特許文献1に記載されているようなプロジェクタを用いるものや、特許文献2に記載されているような一列に並んだ複数個の光源及びそれらからの光を格子模様(縞パターン)にして通過させる格子模様プレート(縞パターン形成光学素子)を用いるものが知られている。
【先行技術文献】
【特許文献】
【0005】
特開2008-281491号公報
特開2011-242178号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、画素ごとに位相値と3次元座標値(x軸、y軸、z軸座標値)を1対1で対応付けた位相-座標テーブルは、計測する物品の大きさや必要とされる精度などによっては画素の数が多くなることが有るために、データ量が膨大になることが起こる。一方、位相-座標テーブルのデータ量が膨大になると、物品検査ラインに配置された商品(計測物品)の3次元座標値を求めて3次元形状を計測するとき(3次元形状計測時に)、位相-座標テーブルを参照する時間が長くなり、検査において高速性が損なわれることがある。
【0007】
本発明は、係る事由に鑑みてなされたものであり、その目的は、撮影画像の画素の数が多くなっても、画素ごとに位相-座標テーブルを参照して位相シフト法を用いた高速な3次元形状計測が可能な3次元形状計測方法を提供することにある。
【課題を解決するための手段】
【0008】
上記目的を達成するために、請求項1に記載の3次元形状計測方法は、順次所定角度ずつ位相がシフトした縞パターンを物品に投影する投影部と、所定個の画素を有し前記物品を撮影して撮影画像を得る撮影部と、前記投影部と前記撮影部が固定される支持体と、を備える3次元計測装置を用いて、校正時には、任意の箇所のx軸、y軸座標値が特定可能な2次元パターンが表示される表面と無地の表面を切り換えることができる校正用物品を前記物品として用い、前記支持体又は前記校正用物品が所定のz軸方向の複数個の位置に移動した各位置において、前記縞パターンの各々が前記校正用物品の前記無地の表面に投影された1組の前記撮影画像から位相シフト法を用いて前記画素ごとの位相値を導出しその位相値とz軸座標値を1対1で対応付けた位相-座標テーブルを作成し、複数個の位置において、前記校正用物品の前記2次元パターンが表示される表面の撮影画像上で複数個の座標値抽出点のX軸、Y軸座標値を抽出し、前記複数個の座標値抽出点のX軸、Y軸座標値とピンホールカメラモデルで算出したX軸、Y軸座標値の誤差を小さくするように、該ピンホールカメラモデルのカメラパラメータを変数とする反復法を行うことによって該カメラパラメータを校正し、3次元形状計測時には、計測物品を前記物品として用い、前記支持体の前記z軸方向の位置を固定して、前記縞パターンの各々が投影された前記計測物品の1組の前記撮影画像から位相シフト法を用いて前記画素ごとの位相値を導出し、その位相値に対応するz軸座標値を前記位相-座標テーブルを参照して導出し、かつ、校正した前記カメラパラメータの前記ピンホールカメラモデルにより前記画素ごとにz軸座標値に対応するx軸、y軸座標値を算出することにより、該計測物品の3次元形状の計測を行う。
【0009】
請求項2に記載の3次元形状計測方法は、請求項1に記載の3次元形状計測方法において、前記投影部は、各々の点灯及び光の放射強度が制御され一列に並んだ複数個の光源及びそれらからの光を縞パターンにして通過させる縞パターン形成光学素子を有し、前記複数個の光源の各々が順次点灯することにより順次所定角度ずつ位相がシフトした縞パターンを物品に投影し、前記校正時と前記3次元形状計測時には、z軸方向を略鉛直方向とする。
【0010】
請求項3に記載の3次元形状計測方法は、請求項1又は2に記載の3次元形状計測方法において、前記校正用物品は、前記2次元パターンが表示される表面と前記無地の表面をスライドさせて切り換えることができる平板、又は任意の箇所のx軸、y軸座標値が特定可能な2次元パターンが表示される表面の平板と無地の表面の平板を切り換えることができるもの、又は任意の箇所のx軸、y軸座標値が特定可能な2次元パターンが表示される表面と無地の表面を表裏に有する平板、である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
計量スプーン
20日前
大和製衡株式会社
組合せ秤
3日前
大和製衡株式会社
組合せ秤
3日前
株式会社東芝
センサ
3日前
アンリツ株式会社
分光器
26日前
トヨタ自動車株式会社
表示装置
12日前
株式会社東芝
センサ
3日前
ダイハツ工業株式会社
測定用具
24日前
アンリツ株式会社
分光器
26日前
株式会社ナリス化粧品
角層細胞採取用具
10日前
株式会社ヨコオ
コンタクタ
24日前
個人
粘塑性を用いた有限要素法の定式化
12日前
TDK株式会社
磁気センサ
20日前
富士電機株式会社
半導体パッケージ
20日前
中国電力株式会社
異常箇所検出装置
11日前
TDK株式会社
磁気計測装置
11日前
大同特殊鋼株式会社
超音波探傷方法
20日前
国立大学法人京都大学
バイオセンサ
27日前
個人
材料特性パラメータの算定方法
20日前
三菱マテリアル株式会社
温度センサ
10日前
三菱マテリアル株式会社
温度センサ
10日前
株式会社関電工
検相器用治具
18日前
日本碍子株式会社
ガスセンサ
21日前
成田空港給油施設株式会社
保持治具
11日前
大新土木株式会社
水深測量装置
26日前
アンリツ株式会社
物品検査装置
3日前
新潟精機株式会社
溶接用ゲージ
20日前
株式会社イシダ
検査装置
26日前
戸田建設株式会社
測量機
11日前
株式会社豊田自動織機
制御装置
3日前
株式会社ヨコオ
シートコンタクタ
26日前
TDK株式会社
温度センサ
11日前
学校法人東海大学
試験装置
10日前
株式会社オンスイ
魚体の硬直度測定方法
19日前
大和ハウス工業株式会社
試験方法
10日前
THKプレシジョン株式会社
荷重測定器
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ