TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025122971
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018750
出願日
2024-02-09
発明の名称
車両制御装置、車両制御プログラム及び車両制御方法
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60L
15/20 20060101AFI20250815BHJP(車両一般)
要約
【課題】車両の走行状態に変化があってもその影響を抑制することができる車両制御装置、車両制御プログラム及び車両制御方法を提供すること。
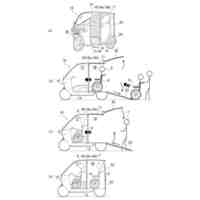
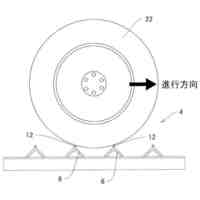
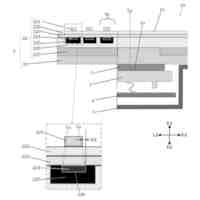
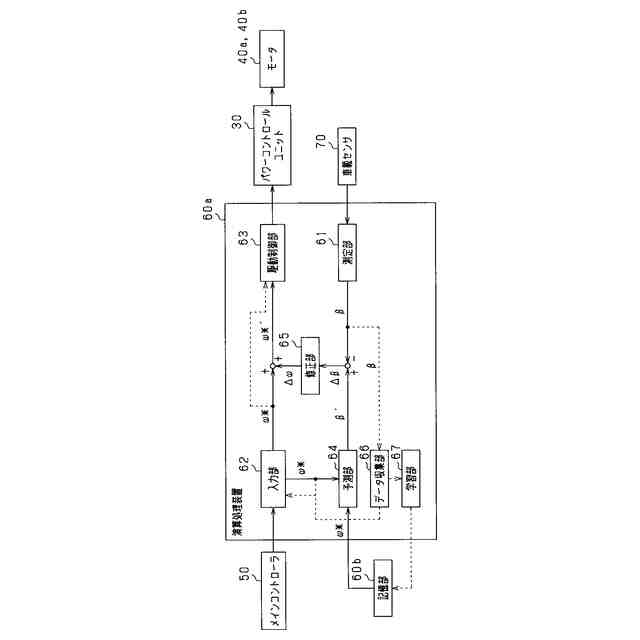
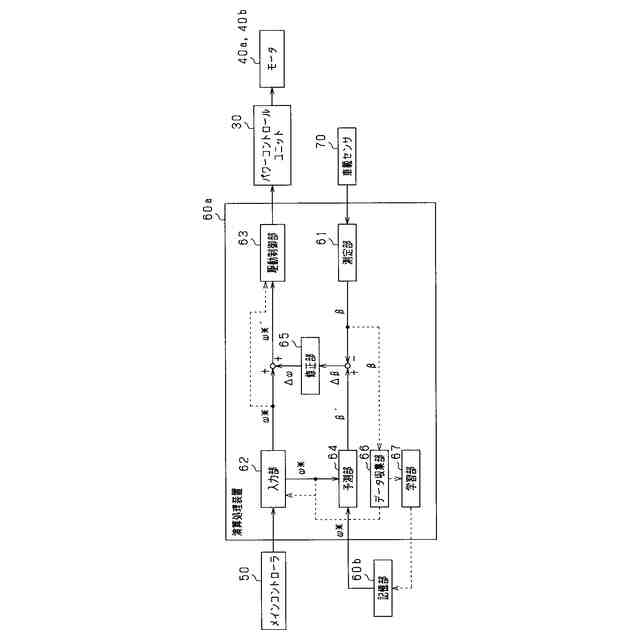
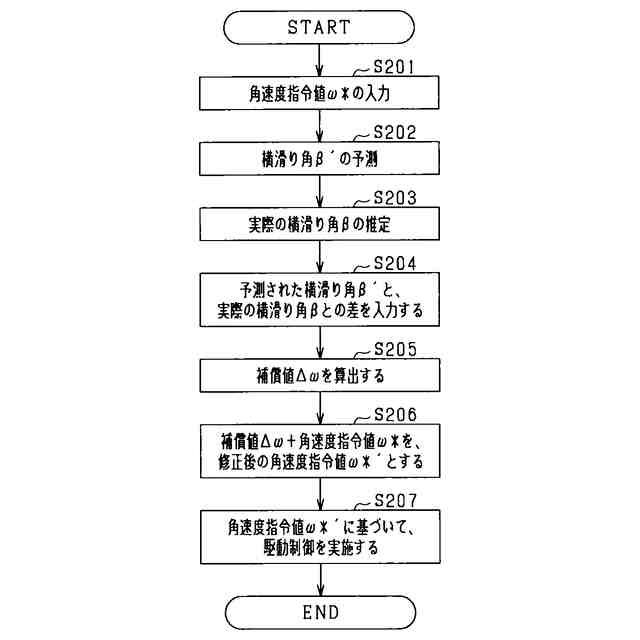
【解決手段】車両100のモータ40a,40bを制御するモータコントローラ60は、車載センサ70の測定結果に基づいて、横滑り角βを推定する測定部61と、角速度指令値ω*を入力する入力部62と、角速度指令値ω*に基づいてモータ40a,40bを制御する駆動制御部63と、入力部62に入力された角速度指令値ω*を予測モデルに入力して、当該予測モデルによって横滑り角β´を予測する予測部64と、測定部61により推定された横滑り角βと、予測部64により予測された横滑り角β´とを比較し、それらの応答差Δβをフィードバックして入力部62に入力された角速度指令値ω*を修正する修正部65と、を備える。
【選択図】 図6
特許請求の範囲
【請求項1】
車両(100)の動力源(40a,40b)を制御する車両制御装置(60)において、
車載センサ(70)の測定結果に基づいて、前記車両の走行状態に相関する走行パラメータのうち少なくとも1つを推定する測定部(61)と、
前記動力源を制御するための制御指令値を入力する入力部(62)と、
制御指令値に基づいて動力源を制御して、前記車両を走行させる駆動制御部(63)と、
前記入力部に入力された前記制御指令値を予測モデルに入力して、当該予測モデルによって前記走行パラメータを予測する予測部(64)と、
前記測定部により推定された走行パラメータと、前記予測部により予測された走行パラメータとを比較し、推定された走行パラメータが予測された走行パラメータに近づくように、それらの差をフィードバックして前記入力部に入力された前記制御指令値を修正し、前記駆動制御部に入力する修正部(65)と、を備える、車両制御装置。
続きを表示(約 1,600 文字)
【請求項2】
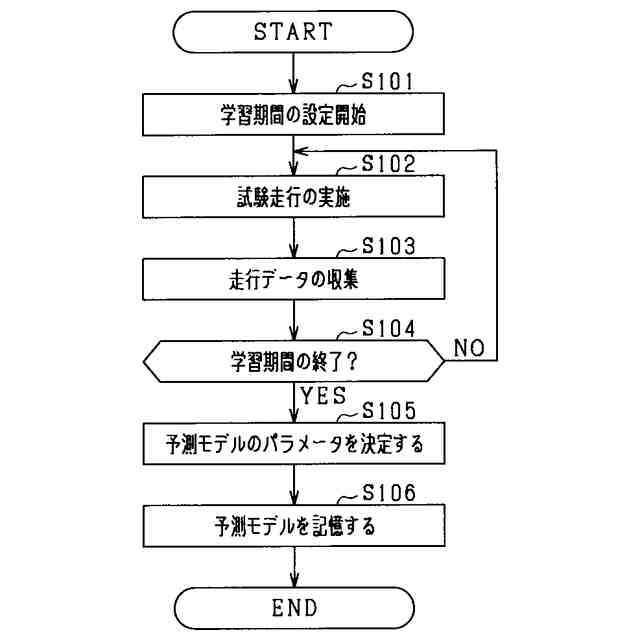
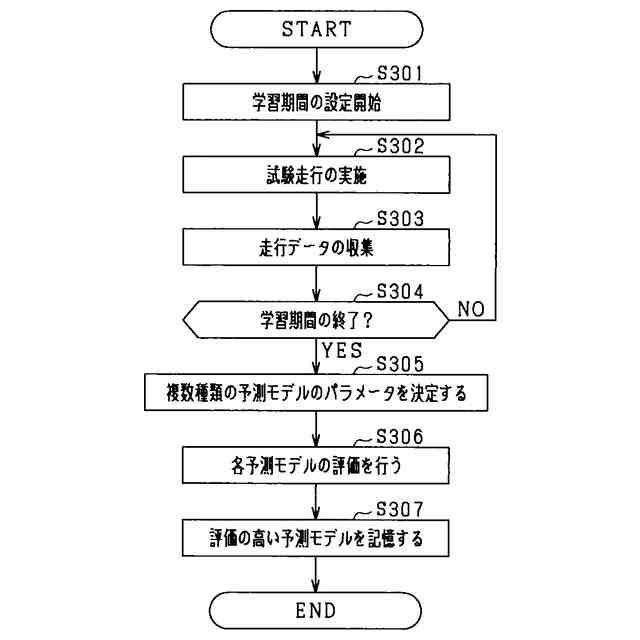
前記車両を試験走行させる一方で、前記試験走行中、前記測定部により推定された走行パラメータを走行データとして記憶するデータ収集部(66)と、
前記データ収集部で取得された走行データに基づいて機械学習を行って前記予測モデルを決定する学習部(67)を備えた、請求項1に記載の車両制御装置。
【請求項3】
前記学習部は、複数種類の予測モデルを決定し、複数の前記予測モデルの予測結果に基づいて、各予測モデルの評価を行い、最も予測精度が高いと評価された予測モデルを学習済みの前記予測モデルとして決定する、請求項2に記載の車両制御装置。
【請求項4】
複数の前記予測モデルは、次数の異なる数式モデルである、請求項3に記載の車両制御装置。
【請求項5】
前記車両を試験走行させる一方で、前記試験走行中、前記測定部により推定された走行パラメータを走行データとして記憶するデータ収集部(71)と、
通信ネットワークを介して前記データ収集部により取得された走行データを外部装置に送信し、当該走行データに基づいて、当該外部装置に前記予測モデルを決定させ、決定された前記予測モデルを受信する通信部(72)と、を備え、
前記予測部は、前記通信部により受信された予測モデルを利用して、前記走行パラメータを予測する請求項1に記載の車両制御装置。
【請求項6】
前記試験走行は、前記車両の製造時、又は出荷後に実施される初期設定時、又はメンテナンス後に設定される再設定時に、実施される、請求項2~請求項5のうちいずれか1項に記載の車両制御装置。
【請求項7】
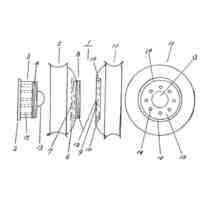
前記動力源は、回転電機(40a,40b)であり、
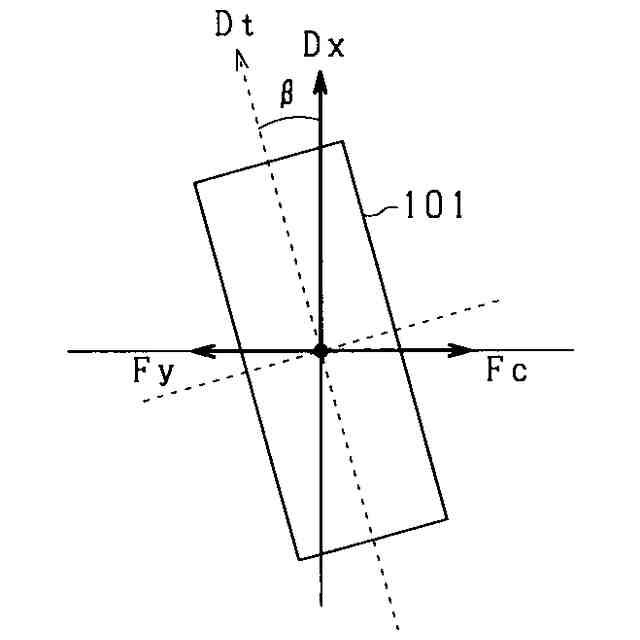
前記走行パラメータは、横滑り角(β)であり、
前記制御指令値は、前記車両の角速度指令値(ω*)である、請求項1~5のうちいずれか1項に記載の車両制御装置。
【請求項8】
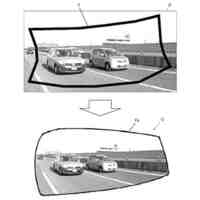
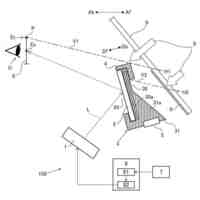
前記車両の走行路面の画像情報を取得し、画像情報から路面状態を判定する路面判定部を備え、
前記予測部は、前記入力部に入力された前記制御指令値とともに、前記路面判定部により判定された路面状態を前記予測モデルに入力して前記走行パラメータを予測させる請求項1~5のうちいずれか1項に記載の車両制御装置。
【請求項9】
前記測定部により推定された走行パラメータと、前記予測部により予測された走行パラメータとの差が、閾値以上である場合、その旨を警告させる通知部を備える、請求項1~5のうちいずれか1項に記載の車両制御装置。
【請求項10】
車両(100)の動力源(40a,40b)を制御する車両制御装置(60)が実施する車両制御プログラムであって、
前記車両制御装置に、
車載センサ(70)の測定結果に基づいて、前記車両の走行状態に相関する走行パラメータのうち少なくとも1つを推定する測定ステップ(61)と、
前記動力源を制御するための制御指令値を入力する入力ステップ(62)と、
制御指令値に基づいて動力源を制御して、前記車両を走行させる駆動制御ステップ(63)と、
前記入力ステップで入力された前記制御指令値を予測モデルに入力して、当該予測モデルによって前記走行パラメータを予測する予測ステップ(64)と、
前記測定ステップにより推定された走行パラメータと、前記予測ステップにより予測された走行パラメータとを比較し、推定された走行パラメータが予測された走行パラメータに近づくように、それらの差をフィードバックして前記入力ステップにて入力された前記制御指令値を修正し、前記駆動制御ステップに入力する修正ステップ(65)と、を実施させる、車両制御プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置、車両制御プログラム及び車両制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、車両の横滑りを防止するため、左右の駆動輪に配分する駆動力の比率を変化させてヨーモーメントを制御するとともに、制動力を左右の車輪に配分してヨーモーメントを制御するヨーモーメントの制御装置が知られている。このようなヨーモーメントの制御装置によれば、車両の安定性能を向上させることができる。このような制御装置は、例えば、特許文献1に記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-162145号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ヨーレートなど制御に必要なパラメータを算出する際、規範となる車両モデルを利用することが一般的である。しかしながら、車両モデルは、路面状態やタイヤ状態が変化すると、それに応じて変更することが望ましいため、ロバスト性に課題があった。
【0005】
本発明は、上記事情に鑑みてなされたものであり、車両の走行状態に変化があってもその影響を抑制することができる車両制御装置、車両制御プログラム及び車両制御方法を提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するための第1の手段は、車両の動力源を制御する車両制御装置において、車載センサの測定結果に基づいて、前記車両の走行状態に相関する走行パラメータのうち少なくとも1つを推定する測定部と、前記動力源を制御するための制御指令値を入力する入力部と、制御指令値に基づいて動力源を制御して、前記車両を走行させる駆動制御部と、前記入力部に入力された前記制御指令値を予測モデルに入力して、当該予測モデルによって前記走行パラメータを予測する予測部と、前記測定部により推定された走行パラメータと、前記予測部により予測された走行パラメータとを比較し、推定された走行パラメータが予測された走行パラメータに近づくように、それらの差をフィードバックして前記入力部に入力された前記制御指令値を修正し、前記駆動制御部に入力する修正部と、を備える。
【0007】
上記手段によれば、測定部により推定された走行パラメータが、予測された走行パラメータに近づくように、制御指令値を修正することができる。このため、車両の走行状態に変化があってもその影響を抑制することができる。
【0008】
上記課題を解決するための第2の手段は、車両の動力源を制御する車両制御装置が実施する車両制御プログラムであって、前記車両制御装置に、車載センサの測定結果に基づいて、前記車両の走行状態に相関する走行パラメータのうち少なくとも1つを推定する測定ステップと、前記動力源を制御するための制御指令値を入力する入力ステップと、制御指令値に基づいて動力源を制御して、前記車両を走行させる駆動制御ステップと、前記入力ステップで入力された前記制御指令値を予測モデルに入力して、当該予測モデルによって前記走行パラメータを予測する予測ステップと、前記測定ステップにより推定された走行パラメータと、前記予測ステップにより予測された走行パラメータとを比較し、推定された走行パラメータが予測された走行パラメータに近づくように、それらの差をフィードバックして前記入力ステップにて入力された前記制御指令値を修正し、前記駆動制御ステップに入力する修正ステップと、を実施させる。
【0009】
上記手段によれば、測定ステップにより推定された実際の走行パラメータが、予測された走行パラメータに近づくように、制御指令値を修正することができる。このため、車両の走行状態に変化があってもその影響を抑制することができる。
【0010】
上記課題を解決するための第3の手段は、車両の動力源を制御する車両制御装置が実施する車両制御方法であって、車載センサの測定結果に基づいて、前記車両の走行状態に相関する走行パラメータのうち少なくとも1つを推定する測定ステップと、前記動力源を制御するための制御指令値を入力する入力ステップと、制御指令値に基づいて動力源を制御して、前記車両を走行させる駆動制御ステップと、前記入力ステップで入力された前記制御指令値を予測モデルに入力して、当該予測モデルによって前記走行パラメータを予測する予測ステップと、前記測定ステップにより推定された走行パラメータと、前記予測ステップにより予測された走行パラメータとを比較し、推定された走行パラメータが予測された走行パラメータに近づくように、それらの差をフィードバックして前記入力ステップにて入力された前記制御指令値を修正し、前記駆動制御ステップに入力する修正ステップ(65)と、が含まれる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カーテント
2か月前
個人
タイヤレバー
1か月前
個人
警告装置
4か月前
個人
車窓用防虫網戸
3か月前
個人
前輪キャスター
5日前
個人
小型EVシステム
4か月前
個人
車輪清掃装置
3か月前
個人
ホイルのボルト締結
2か月前
日本精機株式会社
ケース
4か月前
個人
ルーフ付きトライク
22日前
個人
タイヤ脱落防止構造
2日前
日本精機株式会社
表示装置
29日前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
29日前
個人
キャンピングトライク
2か月前
日本精機株式会社
表示装置
29日前
日本精機株式会社
表示装置
5か月前
個人
車両通過構造物
1か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
5か月前
日本精機株式会社
表示装置
12日前
個人
アクセルのソフトウェア
2か月前
個人
ブレーキシステム
4か月前
個人
キャンピングトレーラー
2か月前
個人
乗合路線バスの客室装置
1か月前
個人
ワイパーゴム性能保持具
3か月前
個人
車両用スリップ防止装置
2か月前
日本精機株式会社
車載表示装置
2か月前
個人
音声ガイド、音声サービス
1か月前
日本精機株式会社
車室演出装置
2日前
個人
円湾曲ホイール及び球体輪
1か月前
個人
車載小物入れ兼雨傘収納具
1か月前
株式会社クラベ
ヒータユニット
3か月前
株式会社ニフコ
保持装置
1か月前
株式会社豊田自動織機
産業車両
26日前
株式会社ニフコ
照明装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ