TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025120779
公報種別
公開特許公報(A)
公開日
2025-08-18
出願番号
2024015874
出願日
2024-02-05
発明の名称
出力精度確認システム及び出力精度確認方法
出願人
清水建設株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G01S
13/90 20060101AFI20250808BHJP(測定;試験)
要約
【課題】設計した仮想対象物に対する、出力した実対象物の出力精度を無人あるいは少人数で簡易かつ短時間に確認することができる出力精度確認システム及び出力精度確認方法を提供する。
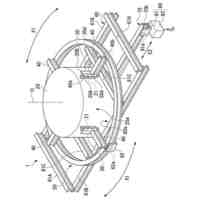
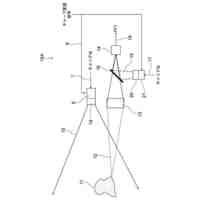
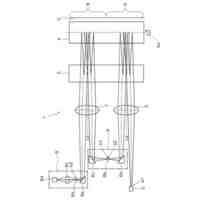
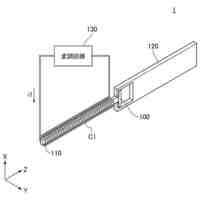
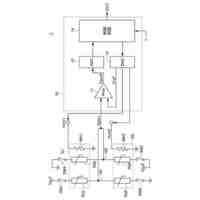
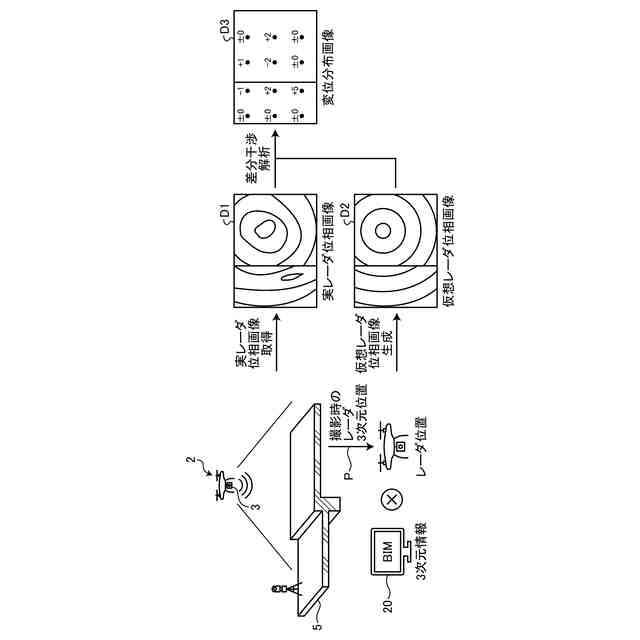
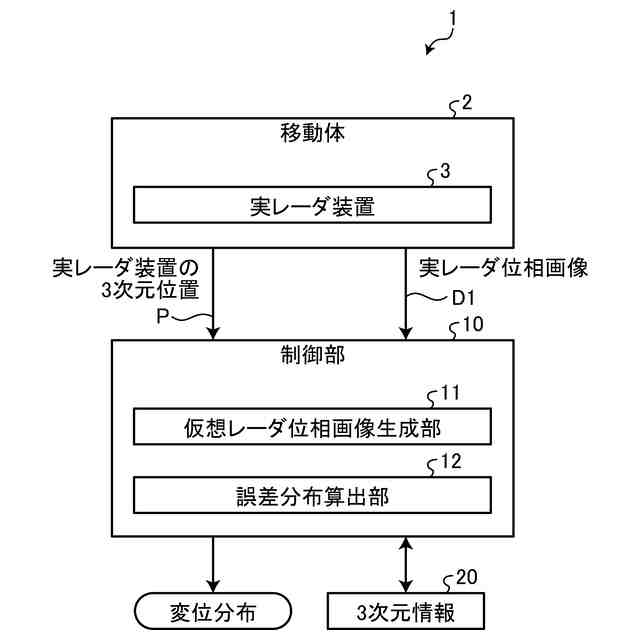
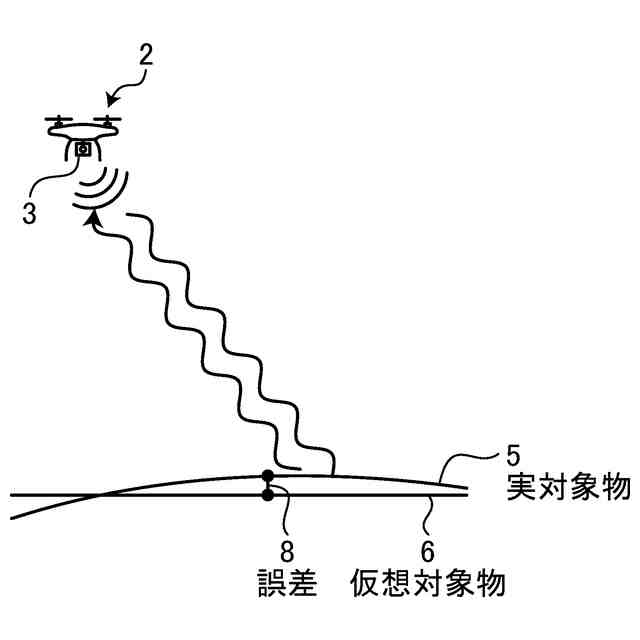
【解決手段】実レーダ装置3は、設計した仮想対象物の3次元情報である3次元情報20をもとに出力した実対象物5の実レーダ位相画像D1を生成し、仮想レーダ位相画像生成部は、実レーダ位相画像D1を生成した際の実レーダ装置3の3次元位置Pに対応する3次元情報20上の3次元位置から3次元情報20の3次元空間内において仮想対象物の仮想レーダ位相画像D2を生成する。その後、誤差分布算出部は、実レーダ位相画像D1と仮想レーダ位相画像D2とに対する差分干渉解析処理を行って、設計上の仮想対象物と出力した実対象物5との誤差分布を算出する。
【選択図】図2
特許請求の範囲
【請求項1】
設計した仮想対象物の3次元情報をもとに出力した実対象物の出力精度を確認する出力精度確認システムであって、
前記実対象物の実レーダ位相画像を生成する実レーダ装置と、
前記実レーダ位相画像を生成した際の前記実レーダ装置の3次元位置に対応する前記3次元情報上の3次元位置から前記3次元情報の3次元空間内において前記仮想対象物の仮想レーダ位相画像を生成する仮想レーダ位相画像生成部と、
前記実レーダ位相画像と前記仮想レーダ位相画像とに対する差分干渉解析処理を行って、設計上の仮想対象物と出力した実対象物との誤差分布を算出する誤差分布算出部と
を備えたことを特徴とする出力精度確認システム。
続きを表示(約 490 文字)
【請求項2】
前記誤差分布算出部は、前記誤差分布を、出力した実対象物の出力精度を示す画像として出力することを特徴とする請求項1に記載の出力精度確認システム。
【請求項3】
前記実レーダ装置は、移動体に搭載された合成開口レーダを含むことを特徴とする請求項1に記載の出力精度確認システム。
【請求項4】
設計した仮想対象物の3次元情報をもとに出力した実対象物の出力精度を確認する出力精度確認方法であって、
実レーダ装置により前記実対象物の実レーダ位相画像を生成する実レーダ位相画像生成ステップと、
前記実レーダ位相画像を取得した際の前記実レーダ装置の3次元位置に対応する前記3次元情報上の3次元位置から前記3次元情報の3次元空間内において前記仮想対象物の仮想レーダ位相画像を生成する仮想レーダ位相画像生成ステップと、
前記実レーダ位相画像と前記仮想レーダ位相画像とに対する差分干渉解析処理を行って、設計上の仮想対象物と出力した実対象物との誤差分布を算出する誤差分布算出ステップと
を含むことを特徴とする出力精度確認方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、設計した仮想対象物に対する、出力した実対象物の出力精度を簡易かつ短時間に確認することができる出力精度確認システム及び出力精度確認方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
建築現場では、完成までの複数の工程ごとに出力された対象物の出力精度を管理する必要がある。このため、出力された対象物に対するレベル実測が行われる。特許文献1では、異なる時刻に取得された同一観測対象の複数のレーダ画像データを取得して観測対象の変化域を抽出するものが提案されている。
【0003】
また、特許文献2には、仮想空間において構造物を三次元に表現するBIM又はCIMに対応している設計データの中に、構造物の基準位置を表すマーカデータを配置し、構造物が実際に存在する現実空間において、設計データ上の基準位置に相当する位置にターゲットマーカを配置し、ターゲットマーカの周囲空間を測量して点群データを取得し、コンピュータ装置が、点群データを解析してターゲットマーカに相当する点群を特定し、特定した点群とマーカデータとを照合させることによって、点群データと設計データとを重畳させるものが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2008-46107号公報
特開2023-125097号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、建設現場でのレベル実測には最低2人を必要とするとともに、オートレベル実測の計測可能範囲が30m程度であり、広範囲を一度に計測することができないことから、対象物全体のレベル実測を完了するまでに時間がかかっていた。このため、建設業界が抱える現場の工程と管理者不足の問題も相まって、短時間で無人あるいは少人数で計測できるような精度確認手段が求められている。
【0006】
また、建設現場に限らず、3DCAD等を利用して設計した3次元情報を3Dプリンタなどで出力する場面では、理想状態(設計した3次元情報など)と出力の誤差を管理する手段が求められている。
【0007】
特許文献1では観測対象に対する複数のレーダ画像を用いて同一観測対象の変化を精度高く抽出しているが、仮想対象物に対する、出力した実対象物の誤差を計測するものではない。
【0008】
本発明は、上記に鑑みてなされたものであって、仮想対象物に対する、出力した実対象物の出力精度を無人あるいは少人数で簡易かつ短時間に確認することができる出力精度確認システム及び出力精度確認方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
上述した課題を解決し、目的を達成するために、本発明にかかる出力精度確認システムは、設計した仮想対象物の3次元情報をもとに出力した実対象物の出力精度を確認する出力精度確認システムであって、前記実対象物の実レーダ位相画像を生成する実レーダ装置と、前記実レーダ位相画像を生成した際の前記実レーダ装置の3次元位置に対応する前記3次元情報上の3次元位置から前記3次元情報の3次元空間内において前記仮想対象物の仮想レーダ位相画像を生成する仮想レーダ位相画像生成部と、前記実レーダ位相画像と前記仮想レーダ位相画像とに対する差分干渉解析処理を行って、設計上の仮想対象物と出力した実対象物との誤差分布を算出する誤差分布算出部とを備えたことを特徴とする。
【0010】
また、本発明にかかる出力精度確認システムは、上記の発明において、前記誤差分布算出部は、前記誤差分布を、出力した実対象物の出力精度を示す(場合によっては数値を伴う)画像として出力することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
清水建設株式会社
外壁構造
8日前
清水建設株式会社
汚染拡散防止構造
15日前
清水建設株式会社
導電線の回収方法
1か月前
清水建設株式会社
加熱井戸の設置方法
15日前
清水建設株式会社
再エネ制御システム、再エネ制御方法
1か月前
清水建設株式会社
角部用タブおよび四面ボックスの溶接方法
14日前
清水建設株式会社
出力精度確認システム及び出力精度確認方法
29日前
清水建設株式会社
ガス回収装置、ビル空調システム、ガス回収方法
8日前
清水建設株式会社
トンネル防水シートの施工管理装置及び施工管理方法
13日前
清水建設株式会社
情報処理システム、情報処理方法、およびプログラム
27日前
清水建設株式会社
スリムケーソン工法に用いる揚重構造およびスリムケーソン工法
6日前
清水建設株式会社
情報処理システム、情報処理装置、情報処理方法、およびプログラム
25日前
個人
計量スプーン
7日前
個人
微小振動検出装置
18日前
株式会社イシダ
X線検査装置
18日前
ユニパルス株式会社
力変換器
1か月前
三菱電機株式会社
計測器
1か月前
株式会社辰巳菱機
システム
27日前
IPU株式会社
距離検出装置
1か月前
アンリツ株式会社
分光器
13日前
ダイハツ工業株式会社
測定用具
11日前
株式会社FRPカジ
FRP装置
29日前
アンリツ株式会社
分光器
13日前
株式会社東芝
センサ
18日前
株式会社カワタ
サンプリング装置
22日前
学校法人立命館
液面レベルセンサ
26日前
株式会社精工技研
光電圧プローブ
19日前
TDK株式会社
磁気センサ
14日前
TDK株式会社
ガスセンサ
21日前
富士レビオ株式会社
嵌合システム
1か月前
大和製衡株式会社
組合せ計量装置
29日前
日本精工株式会社
分注装置
25日前
TDK株式会社
磁気センサ
7日前
株式会社ヨコオ
コンタクタ
11日前
大陽日酸株式会社
液面センサ
14日前
富士電機株式会社
半導体パッケージ
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ