TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117997
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024013038
出願日
2024-01-31
発明の名称
結束システム
出願人
マックス株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
E04G
21/12 20060101AFI20250805BHJP(建築物)
要約
【課題】複数の鉄筋の交点を好適に結束する。
【解決手段】結束システム1は、配設された複数の鉄筋Sに関する第1情報を取得する第1カメラ31と、第1カメラ31で取得した第1情報に基づいて移動し、複数の鉄筋Sの交点Pに関する第2情報を取得する第2カメラ51と、第2カメラ51で取得した第2情報に基づいて交点Pを結束する結束装置6と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
配設された複数の鉄筋に関する第1情報を取得する第1情報取得部と、
前記第1情報に基づいて移動し、前記複数の鉄筋の交点に関する第2情報を取得する第2情報取得部と、
前記第2情報に基づいて前記交点を結束する結束装置と、
を備える結束システム。
続きを表示(約 840 文字)
【請求項2】
前記第2情報取得部及び前記結束装置の双方を一体的に搭載して移動させる移動体を備える、
請求項1に記載の結束システム。
【請求項3】
前記移動体は、前記第2情報取得部及び前記結束装置の少なくとも一方について、直交3軸の各軸上の位置と、直交3軸のうち少なくともいずれか1つの軸回りの角度と、を変更可能である、
請求項2に記載の結束システム。
【請求項4】
前記第1情報取得部が前記第1情報の取得を行う第1領域と、前記移動体が移動可能な第2領域と、が異なる、
請求項2に記載の結束システム。
【請求項5】
前記複数の鉄筋を保持する保持部を備え、
前記保持部は、前記第1領域から前記第2領域に移動可能である、
請求項4に記載の結束システム。
【請求項6】
前記保持部は、前記第2領域から前記第1領域に移動可能である、
請求項5に記載の結束システム。
【請求項7】
前記第2情報取得部は、前記結束装置により結束された状態の前記交点に関する前記第2情報を取得可能である、
請求項1に記載の結束システム。
【請求項8】
前記第1情報及び前記第2情報のうち少なくとも一方を記憶する記憶部を備える、
請求項1に記載の結束システム。
【請求項9】
前記第1情報及び前記第2情報の少なくとも一方に基づいて前記結束装置の動作を制御する制御部と、
前記結束装置による結束作業に関する作業情報を記憶する記憶部と、
を備える、
請求項1に記載の結束システム。
【請求項10】
前記第2情報に基づいて、前記複数の鉄筋における各交点の位置情報を含む地図情報を作成する地図作成部を備える、
請求項1に記載の結束システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、鉄筋を結束する結束システムに関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
従来、複数の鉄筋が組み合わされたワークに対し、交差する鉄筋の交点をワイヤで順次結束する結束システムが知られている。
この種の結束システムとして、例えば特許文献1に記載のものでは、ロボットアームの先端にセンサ等の情報取得部と結束機を搭載している。そして、鉄筋の交点の位置等のワークの情報を情報取得部で取得し、当該ワークの情報に基づいて結束機を制御している。
また、特許文献2に記載の結束システムでは、多数の交点を有するワーク全体を上方に固定されたカメラで撮影し、その画像から各交点の位置を求めている。
【先行技術文献】
【特許文献】
【0003】
特開2023-105958号公報
中国特許出願公開第113264212号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載の技術では、ワーク全体における各交点の位置情報を好適に取得できない。この各交点の位置情報を予め取得できていないと、複数の交点を効率的に順次結束することが難しい。
一方、上記特許文献2に記載の技術では、上方のカメラで撮影した画像に基づいて、ワーク全体における各交点の位置情報を取得できる。しかし、各交点から離間したカメラによる画像では、結束時における位置補正等の制御を好適に実施することができない。
【0005】
本発明は、上記事情に鑑みてなされたもので、複数の鉄筋の交点を好適に結束することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決するため、本発明の結束システムは、
配設された複数の鉄筋に関する第1情報を取得する第1情報取得部と、
前記第1情報に基づいて移動し、前記複数の鉄筋の交点に関する第2情報を取得する第2情報取得部と、
前記第2情報に基づいて前記交点を結束する結束装置と、
を備える。
【発明の効果】
【0007】
本発明によれば、配設された複数の鉄筋に関する第1情報に基づいて、相対的に広域な範囲における複数の交点の位置や障害物の有無等の情報が把握される。そして、当該第1情報に基づいて第2情報取得部が移動し、より局所的な範囲における、より高精度な第2情報が当該第2情報取得部によって取得される。その後、当該第2情報に基づいて鉄筋の交点が結束される。したがって、複数の鉄筋の交点を好適に結束することができる。
【図面の簡単な説明】
【0008】
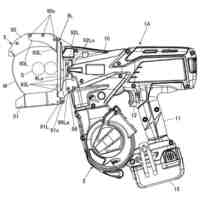
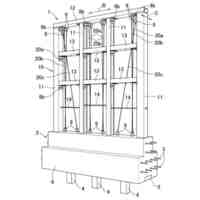
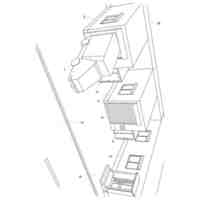
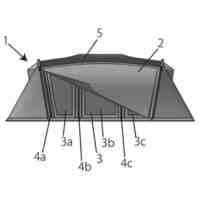
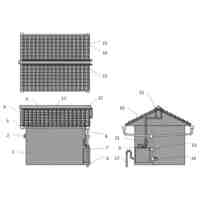
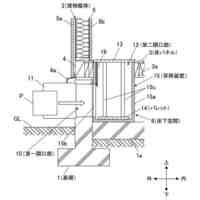
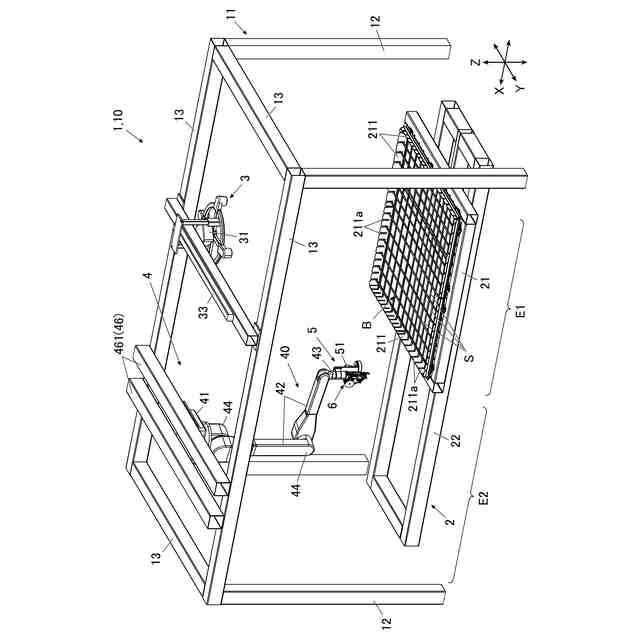
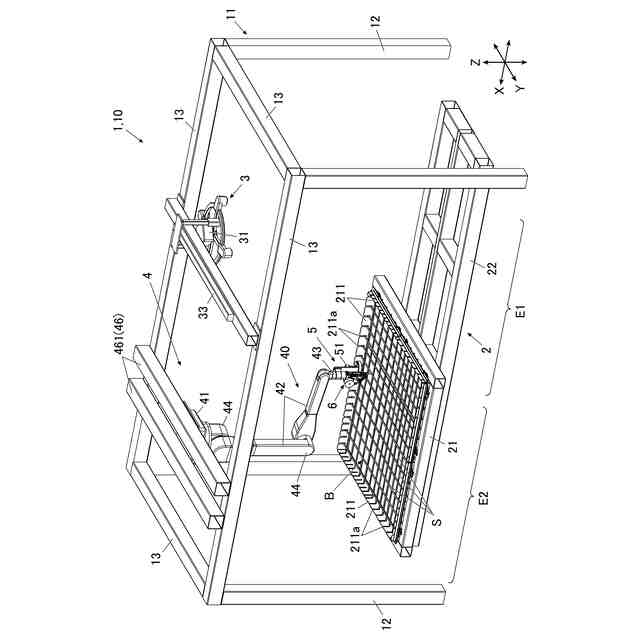
第1実施形態に係る結束システムの装置本体の斜視図である。
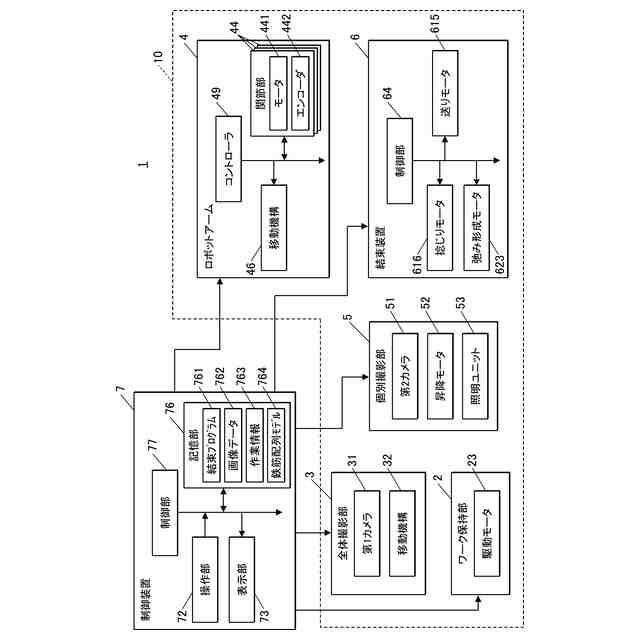
第1実施形態に係る結束システムの概略の制御構成を示すブロック図である。
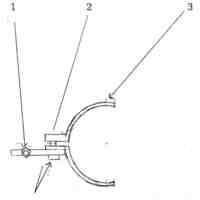
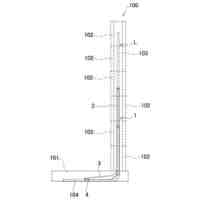
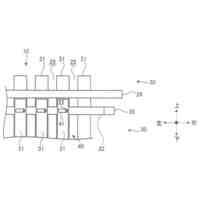
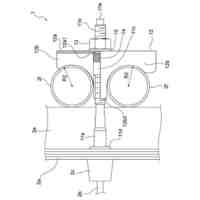
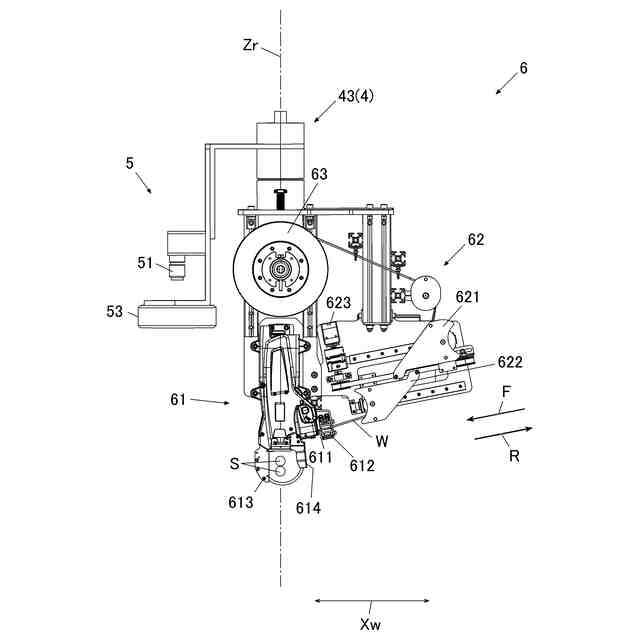
第1実施形態に係る結束装置の側面図である。
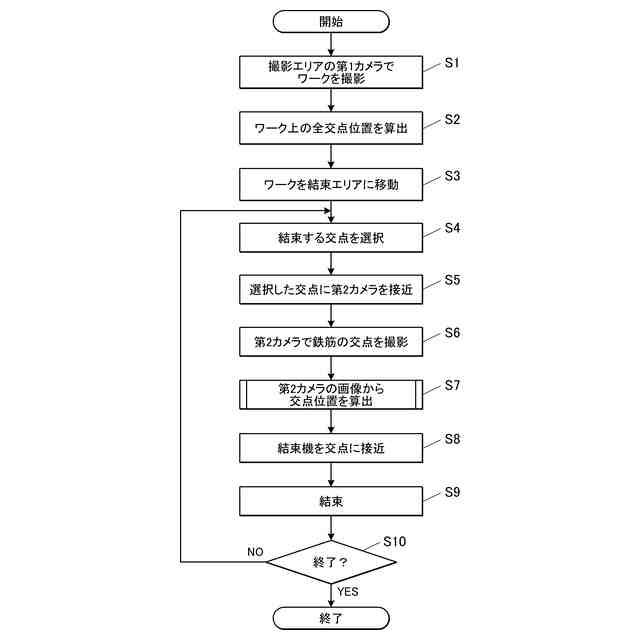
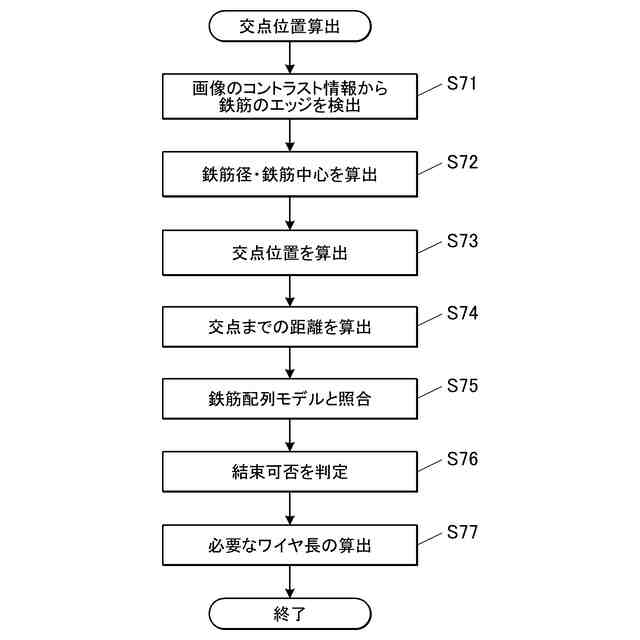
第1実施形態に係る結束処理の手順を示すフローチャートである。
第1実施形態に係る結束処理の手順を示すフローチャートである。
第1実施形態に係る第1カメラで取得された画像データ例を示す図である。
第1実施形態に係るワークを結束エリアに移動させた状態の装置本体の斜視図である。
第1実施形態に係る第2カメラで取得された画像データ例を示す図である。
図8Aの画像データに鉄筋やそれ以外の各位置の高さ情報を付与した画像データ例を示す図である。
第1実施形態に係る画像データから検出した鉄筋の形状を説明するための図である。
第1実施形態に係る結束処理の変形例の手順を示すフローチャートである。
第2実施形態に係る結束システムの装置本体の斜視図である。
第2実施形態に係る結束システムの概略の制御構成を示すブロック図である。
第2実施形態に係る結束装置が結束動作を行う際の姿勢での側面図である。
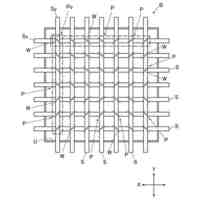
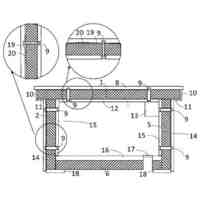
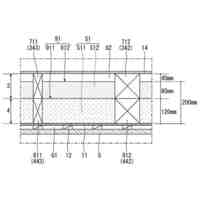
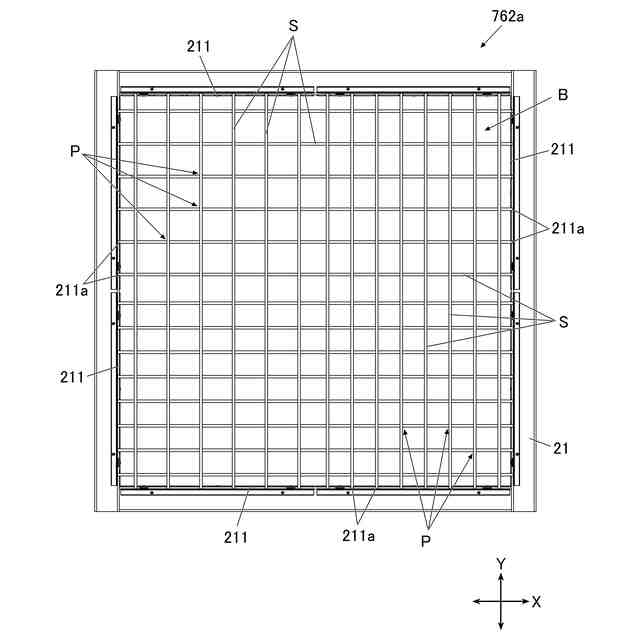
第2実施形態に係るワーク保持部の保持台上のワークを上側から見た概略図である。
第2実施形態に係る結束方向の第1方向で結束を行った交点を示す平面図である。
第2実施形態に係る結束方向の第2方向で結束を行った交点を示す平面図である。
第2実施形態に係る「結束回数」を二回で結束を行った交点を示す平面図である。
第2実施形態に係る第1方向について結束回数一回と第2方向について結束回数一回として結束を行った交点を示す平面図である。
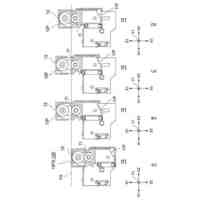
第2実施形態に係る結束の順番を(1)外縁先行のパターンで結束を行う場合の動作説明図である。
第2実施形態に係る結束の順番を(2)中心先行のパターンで結束を行う場合の動作説明図である。
第2実施形態に係る結束の順番を(3)横送りのパターンで結束を行う場合の動作説明図である。
第2実施形態に係る結束の順番を(4)縦送りのパターンで結束を行う場合の動作説明図である。
第2実施形態に係る結束の順番を(5)角部先行のパターンで結束を行う場合の動作説明図である。
第2実施形態に係る「角部に位置する交点」と「外縁に位置する交点」とそれ以外の交点との区別を示した説明図である。
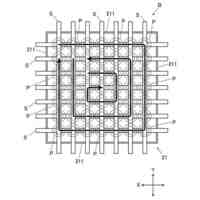
第2実施形態に係る結束の対象となる交点からなる領域が変則形状である場合のワークを上側から見た概略図である。
第2実施形態に係る結束システムが結束処理を実行するときの手順を示すフローチャートである。
第3実施形態に係る結束システムの概略の制御構成を示すブロック図である。
第3実施形態に係る結束方向の決定処理における条件(1)に従って行われたワークの平面図である。
第3実施形態に係る結束方向の決定処理における条件(2)に従って行われたワークの平面図である。
第3実施形態に係る結束方向の決定処理における条件(3)に従って行われたワークの平面図である。
第3実施形態に係る結束方向の決定処理における条件(4)に従って行われたワークの平面図である。
第3実施形態に係る結束方向の決定処理における条件(4)に従って行われたワークの交点における拡大平面図である。
第3実施形態に係る結束方向の決定処理における条件(5)に従って行われたワークの平面図である。
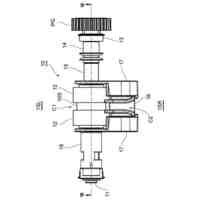
図13の結束装置を旋回軸の一方から見た平面図である。
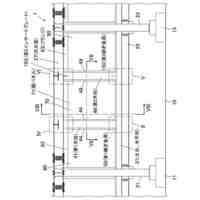
第3実施形態に係る装置本体の一部の構成を省略した平面図である。
第3実施形態に係る結束システムが結束処理を実行するときの手順を示すフローチャートである。
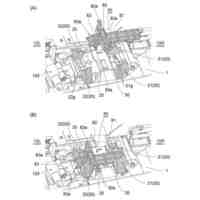
第4実施形態に係る結束装置の一例を示す側面図である。
第4実施形態に係る結束装置の一例を示す一部部品の図示を省略した側面図である。
第4実施形態に係る結束装置の一例を示す斜視図である。
第4実施形態に係る結束装置の一例を示す背面図である。
第4実施形態に係る結束装置の一例を示す裏面から見た側面図である。
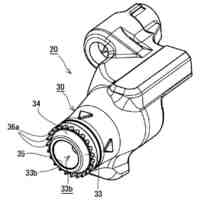
第4実施形態に係る鉄筋結束機の一例を示す側面から見た内部構成図である。
第4実施形態に係る結束システムの一例を示す斜視図である。
第4実施形態に係る結束システムの一例を示す斜視図である。
第4実施形態に係る結束装置の動作の一例を示す側面図である。
第4実施形態に係る結束装置の動作の一例を示す一部部品の図示を省略した側面図である。
第4実施形態に係る結束装置の動作の一例を示す側面図である。
第4実施形態に係る結束装置の動作の一例を示す一部部品の図示を省略した側面図である。
第4実施形態に係る結束動作の一例を示す結束装置の一部部品の図示を省略した側面図である。
【発明を実施するための形態】
【0009】
≪第1実施形態≫
以下、本発明の第1実施形態について、図面を参照して説明する。
【0010】
[結束システムの構成]
図1は、第1実施形態に係る結束システム1が備える装置本体10の斜視図であり、図2は、結束システム1の概略の制御構成を示すブロック図である。
これらの図に示すように、結束システム1は、複数の鉄筋Sが格子状に配列されてなるワークBを、当該複数の鉄筋Sが交差する交点で結束するものである。
具体的に、結束システム1は、装置本体10と制御装置7を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
マックス株式会社
結束機
20日前
マックス株式会社
プリンタ
1日前
マックス株式会社
ネジ打ち機
2日前
マックス株式会社
打ち込み工具
2日前
マックス株式会社
プラテンユニット
1日前
マックス株式会社
結束システム及び結束処理プログラム
29日前
マックス株式会社
結束システム及び結束処理プログラム
29日前
マックス株式会社
プリンタ、及び当該プリンタに装着されるアタッチメント
1日前
マックス株式会社
打込み工具
20日前
マックス株式会社
プラテンユニット、及び当該プラテンユニットを備えたプリンタ
1日前
個人
野良猫ハウス
8日前
個人
フェンス
24日前
個人
キャチクランプ
3か月前
個人
転落防止用手摺
2日前
ニチハ株式会社
建築板
16日前
個人
地下型マンション
2か月前
積水樹脂株式会社
柵体
1日前
個人
居住車両用駐車場
10日前
個人
壁断熱パネル
3か月前
個人
熱抵抗多層断熱建材
9日前
個人
鋼管結合資材
2か月前
株式会社タナクロ
テント
2か月前
個人
補強部材
9日前
個人
柵
1か月前
成友建設株式会社
建物
8日前
個人
循環流水式屋根融雪装置
2か月前
鹿島建設株式会社
壁体
15日前
三協立山株式会社
構造体
3か月前
イワブチ株式会社
組立柱
1日前
三協立山株式会社
構造体
2か月前
インターマン株式会社
天井構造
29日前
鹿島建設株式会社
接合構造
1か月前
ミサワホーム株式会社
建物
4か月前
日鉄建材株式会社
屋根構造
13日前
岡部株式会社
型枠緊結金具
2か月前
ミサワホーム株式会社
躯体
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ