TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025117437
公報種別
公開特許公報(A)
公開日
2025-08-12
出願番号
2024012272
出願日
2024-01-30
発明の名称
走行システム及び走行装置
出願人
チームラボ株式会社
代理人
個人
,
個人
主分類
G05D
1/693 20240101AFI20250804BHJP(制御;調整)
要約
【課題】上位の制御局からの制御に依らずに複数の走行装置を適切に既定経路上の複数の停車エリアにて停止させる。
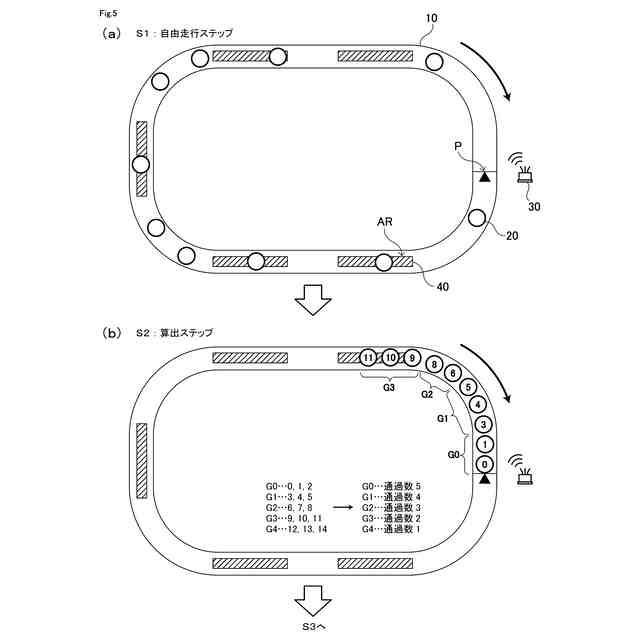
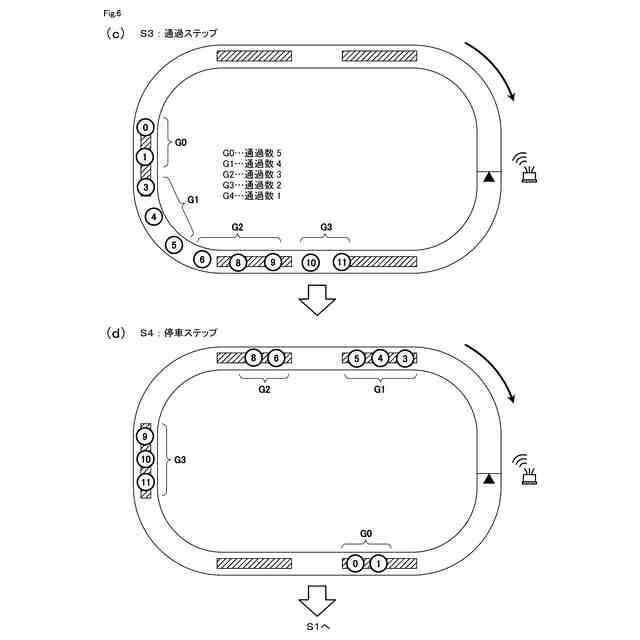
【解決手段】複数の走行装置20は、それぞれ、既定の経路10上の指定点Pまでの距離を測定するための測距部と、前方の別の走行装置20に近接していることを検知する検知部と、所定のアルゴリズムに基づいて発進と停止を制御する制御部を有する。制御部は、自己の走行装置20が指定点Pに到達したか又は前方の別の走行装置20に近接したことを検知したときに自己の走行装置20を一時停止させ、一時停止中に指定点Pまでの距離を算出し、指定点Pまでの距離に基づいて自己の走行装置20が属するグループを推定し、グループの情報に基づいて停車エリアARで停止するための停止情報を求め、停止情報に基づいて自己の走行装置20を停車エリアARで停止させる。
【選択図】図5
特許請求の範囲
【請求項1】
複数の走行装置に既定の経路上を走行させるためのシステムであって、
前記経路上には複数の停車エリアが設けられており、
前記走行装置のそれぞれは、
前記経路上の指定点までの距離を測定するための測距部と、
前方の別の走行装置に近接していることを検知する検知部と、
所定のアルゴリズムに基づいて自己の走行装置の発進と停止を制御する制御部を有し、
前記制御部は、
自己の走行装置が前記指定点に到達したか又は前方の別の走行装置に近接したことを検知したときに自己の走行装置を一時停止させ、
一時停止中に自己の走行装置から前記指定点までの距離を算出し、
前記指定点までの距離に基づいて自己の走行装置が属するグループを推定し、
前記グループの情報に基づいて自己の走行装置が前記停車エリアで停止するための停止情報を求め、
前記停止情報に基づいて自己の走行装置を前記停車エリアで停止させる
システム。
続きを表示(約 1,100 文字)
【請求項2】
前記制御部は、
前方の別の走行装置に近接したことを検知したことによって自己の走行装置を一時停止させた場合に、
自己の走行装置を前方の別の走行装置から所定の車間距離を保持して停止させ、
前記指定点までの距離、前記車間距離、及び走行装置の全長に基づいて前記指定点まで続く走行装置の列における自己の走行装置の順位を推定することによって、自己の走行装置が属するグループの番号を推定し、
前記グループの番号に基づいて自己の走行装置が前記停車エリアを通過する通過数を求め、当該通過数を過ぎた後に自己の走行装置を前記停車エリアで停止させる
請求項1に記載のシステム。
【請求項3】
前記システムは、前記指定点の近傍に設置された基地局を備え、
前記基地局は、電波信号、音波信号、又は光信号の無線信号を発信しており、
前記走行装置の前記制御部は、前記測距部により受信した前記無線信号に基づいて自己の走行装置から前記指定点までの距離を算出する
請求項1又は請求項2に記載のシステム。
【請求項4】
前記停車エリアは、前記走行装置に搭載されているバッテリを充電するための充電器を含む
請求項1又は請求項2に記載のシステム。
【請求項5】
前記走行装置の数は、前記停車エリアの数よりも多く、
前記停車エリアの数は、前記グループの数と同じか又は前記グループの数よりも多い
請求項1又は請求項2に記載のシステム。
【請求項6】
前記走行装置は、外部のコンピュータからの制御を受けず、前記アルゴリズムのみに基づいて発進と停止の制御が行われる
請求項1又は請求項2に記載のシステム。
【請求項7】
複数の停車エリアが設けられてる既定の経路上を走行可能な走行装置であって、
前記経路上の指定点までの距離を測定するための測距部と、
前方の別の走行装置に近接していることを検知する検知部と、
所定のアルゴリズムに基づいて自己の走行装置の発進と停止を制御する制御部を有し、
前記制御部は、
自己の走行装置が前記指定点に到達したか又は前方の別の走行装置に近接したことを検知したときに自己の走行装置を一時停止させ、
一時停止中に自己の走行装置から前記指定点までの距離を算出し、
前記指定点までの距離に基づいて自己の走行装置が属するグループを推定し、
前記グループの情報に基づいて自己の走行装置が前記停車エリアで停止するための停止情報を求め、
前記停止情報に基づいて自己の走行装置を前記停車エリアで停止させる
走行装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行可能な複数の走行装置を規定の経路上に沿って走行させるためのシステムに関する。また、本発明は、自律走行可能な走行装置それ自体にも関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
本願出願人は、以前より、予め敷設されたレーンを走行するモータ駆動の走行装置を提案している(特許文献1)。この特許文献1に記載の走行装置は、レーンの左右に設けられた側壁に接触しながら走行することが想定されている。
【0003】
その他にも、従来から、走行面に描かれた軌道に沿って自律走行する走行玩具が知られている(例えば特許文献2)。特許文献2に記載の走行玩具は、走行面に描かれた軌道を検知するためのフォトセンサ(光学センサ)を備えており、このフォトセンサによって走行面からの反射光に基づいて軌道を光学的に検出するように構成されている。
【先行技術文献】
【特許文献】
【0004】
特許第7365084号公報
特開2006-181241号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1や特許文献2に示された走行装置を、既定の経路上で複数台連続的に走行させ続けることを考える。その場合は、例えば、経路上の各所に充電エリアを設けておき、走行装置を定期的に充電エリアで停止させ、ワイヤレス方式の充電器で走行装置に搭載されたバッテリを充電して、走行を再開させることが有効である。このように充電のための停止と発進とを自動的に繰り返すことで、各走行装置は経路上を走行し続けることが可能となる。
【0006】
このように走行装置を自律走行させる場合には、コントロールセンターのような上位の制御局を設けておき、この制御局から全ての走行装置に対して停止と発進に関わる制御指令を送信し、この指令に基づいて走行装置の走行状態を制御することが一般的であると考えられる。しかしながら、上位の制御局によって全ての走行装置の走行状態を制御する場合、例えば各走行装置が自己の位置や充電残量などの報告を上位の制御局に行ったり、制御局が各走行装置に対して充電エリアを指定する命令を送信したりするなど、走行装置と制御局との間で情報の送受信を頻繁に行う必要がある。その結果、システム全体の通信データ量が自ずと増えてしまい、通信スピードが非常に早い環境でないと、走行装置の制御処理が追いつかないという問題が発生する。特に走行装置の数が多いと通信の負担が膨大になるため、そのようなシステムの実現はより困難となる。例えば通信環境の悪い室内において走行装置を密集して走行させるような場合には、全ての走行装置を上位の制御局によって中央管理することは現実的ではない。
【0007】
一方で、上記のような通信データ量の問題から、上位の制御局により走行装置を制御することを断念し、各走行装置をそれぞれ独自に走行させることも検討される。しかしながら、その場合には、各走行装置は他の走行装置の状況を把握することができなくなるため、どの充電エリアで停止すればよいのかを独自に判断することが難しいという問題が発生する。特に、既定の経路上に充電エリアを設けた場合、それぞれの走行装置が勝手に充電エリアで停止すると、その後続の走行装置の障害となってしまい、後続の走行装置と衝突したり、後続の走行装置が停止中の走行装置を超えて前に進めなくなる。また、多数の走行装置が重複して1つの充電エリアで停止しようとすると、充電エリアに一度に停止できる走行装置の許容値を超えることも懸念される。なお、走行装置を充電エリアで停止させる場合に限らず、走行装置を経路上の所定の停車エリアで適宜停止させて、経路上にて走行装置を適度に分散して走行させるといったような場合にも同様の問題が発生し得る。
【0008】
そこで、本発明は、既定の経路上で複数の走行装置を走行させる場合に、上位の制御局からの制御に依らずに、各走行装置を適切に停車エリアにて停止させることを主な目的とする。
【課題を解決するための手段】
【0009】
本発明の発明者は、上記の問題を解決する手段について鋭意検討した結果、複数の走行装置を複数の停車エリアに分散して停止させることのできるアルゴリズムを開発し、このアルゴリズムを走行装置のそれぞれに搭載しておくことで、上位の制御局からの制御に依らずに、各走行装置を適切に停車エリアに停止させることができるようになるという知見を得た。そして、本発明者は、このような知見に基づけば上記の問題を解決できることに想到し、本発明を完成させた。
【0010】
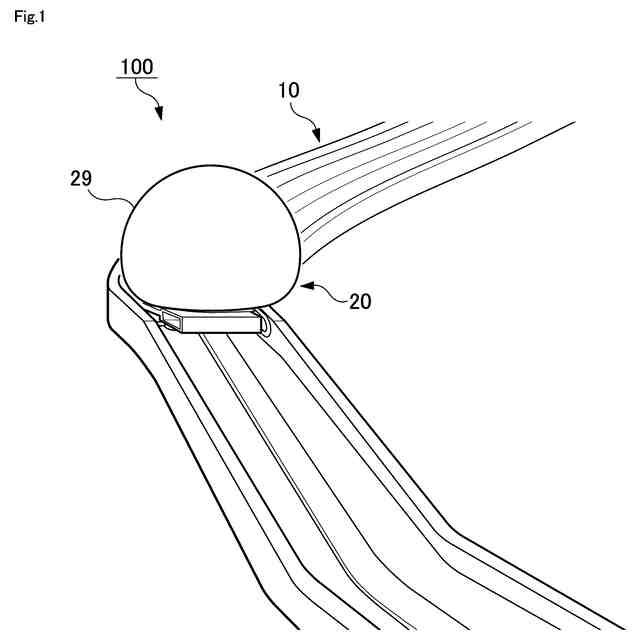
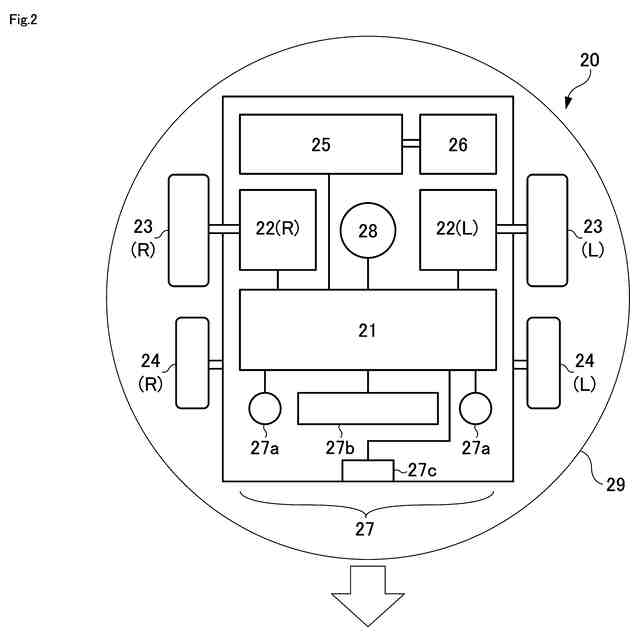
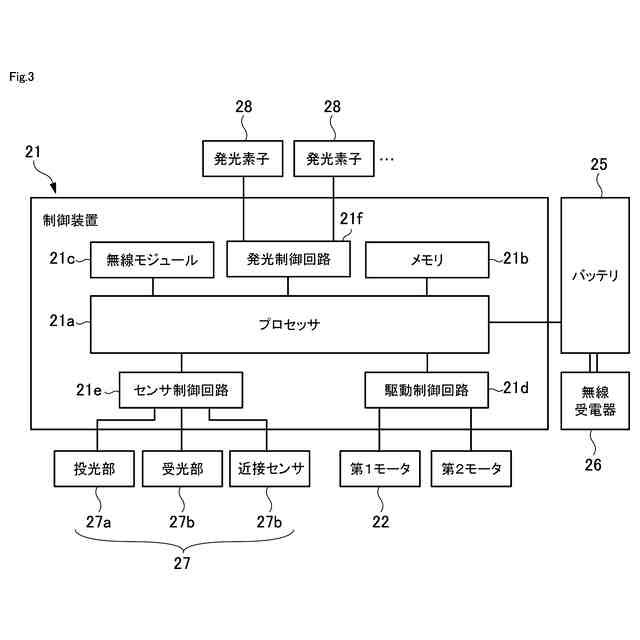
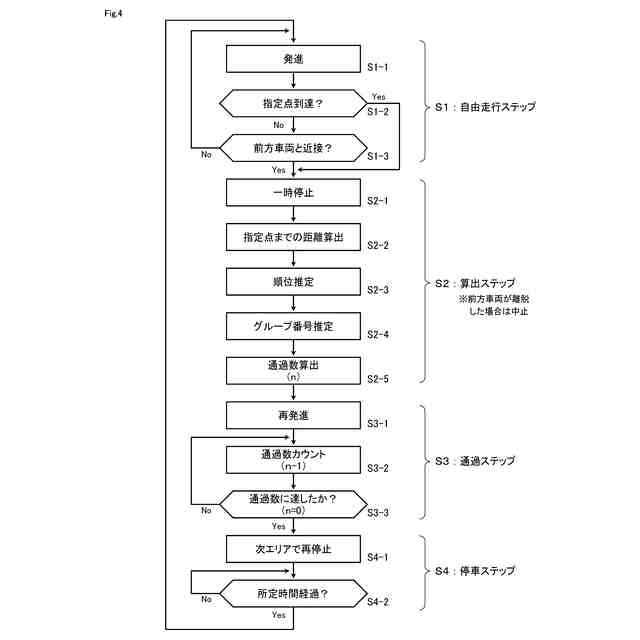
本発明の第1の側面は、複数の走行装置20に既定の経路10上を走行させるためのシステム100に関する。この経路10上には、複数の停車エリアARが設けられている。なお、この経路10は、経路10の左右両側に側壁を設けておき、走行装置20をこの側壁に接触させながら走行させるものであってもよいし、それに代えて、経路10上に誘導線を引いておき、この誘導線に沿って走行装置20を走行させるものであってもよい。複数の走行装置20は、それぞれは測距部、検知部、及び制御部を有する。測距部は、経路10上の指定点Pまでの距離を測定するための要素である。測距部としては、例えば電波信号を受信する無線モジュールや、音波信号を受信するマイクロフォン、光信号を受信する光センサを利用できる。検知部は、前方の別の走行装置に近接していることを検知する。制御部は、所定のアルゴリズムに基づいて自己の走行装置の発進と停止を制御する。具体的には、制御部は、自己の走行装置20が指定点Pに到達したか又は前方の別の走行装置20に近接したことを検知したときに自己の走行装置20を一時停止させる。次に、制御部は、一時停止中に自己の走行装置20から指定点Pまでの距離を算出する。次に、制御部は、自己の走行装置20から指定点Pまでの距離に基づいて自己の走行装置20が属するグループを推定する。次に、制御部は、ここで推定したグループの情報に基づいて自己の走行装置が停車エリアARで停止するための停止情報を求める。そして、制御部は、この停止情報に基づいて自己の走行装置を停車エリアARで停止させる。このように、走行装置20のそれぞれに発進と停止を制御するためのアルゴリズムを実装することで、各走行装置は、上位の制御局と通信しなくても適切に停車エリアARに停止できるようになる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
チームラボ株式会社
着色された金属製品の製造方法
26日前
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
24日前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
10日前
株式会社ダイヘン
移動体
2か月前
愛知製鋼株式会社
車両用システム
18日前
株式会社FUJI
加工機械ライン
1か月前
ローム株式会社
基準電圧源
7日前
個人
作業車両自動化システム
1か月前
ローム株式会社
半導体集積回路
3か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
トヨタ自動車株式会社
生産管理システム
1か月前
三栄ハイテックス株式会社
基準電圧回路
3か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
14日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
移動制御システム
1か月前
トヨタ自動車株式会社
減圧弁
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社オプトン
制御プログラム生成装置
2か月前
株式会社鷺宮製作所
制御装置
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
2か月前
キヤノン株式会社
配送システム
10日前
株式会社ダイフク
物品搬送設備
2か月前
マーク ヘイリー
消防ロボット
1か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
トヨタ自動車株式会社
クラッチペダル
21日前
株式会社ダイフク
物品搬送設備
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
キヤノン電子株式会社
加工システム、及び、加工装置
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
24日前
アズビル株式会社
制御システムおよび制御方法
1か月前
愛知製鋼株式会社
マーカシステム及び制御方法
19日前
アズビル株式会社
制御システムおよび制御方法
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ