TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025116734
公報種別
公開特許公報(A)
公開日
2025-08-08
出願番号
2024011336
出願日
2024-01-29
発明の名称
ランドマーク、位置推定方法、およびプログラム
出願人
大成建設株式会社
代理人
弁理士法人磯野国際特許商標事務所
主分類
E01F
9/608 20160101AFI20250801BHJP(道路,鉄道または橋りょうの建設)
要約
【課題】位置推定の精度を向上することが可能なランドマーク、位置推定方法、およびプログラムを提供する。
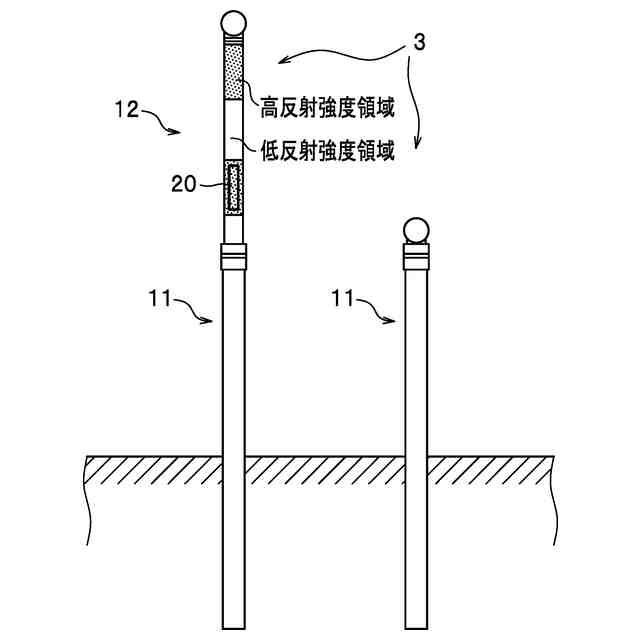
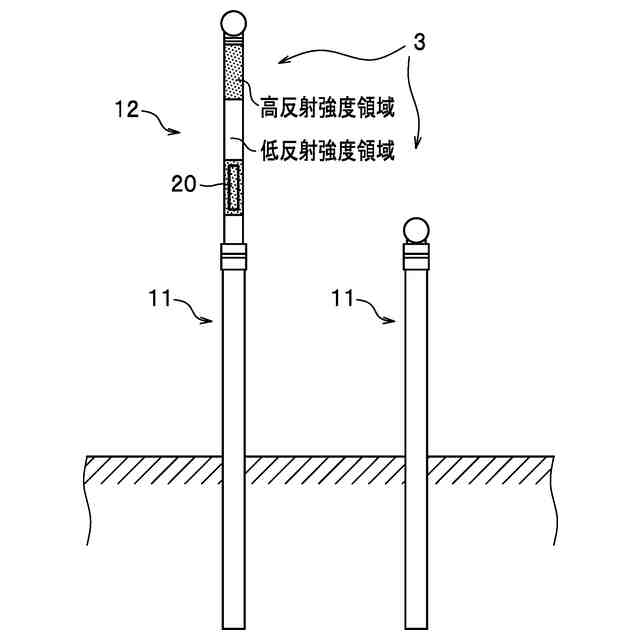
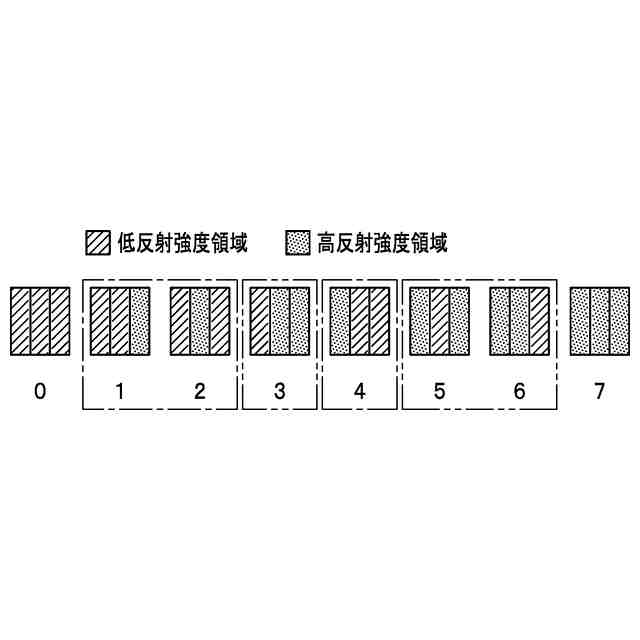
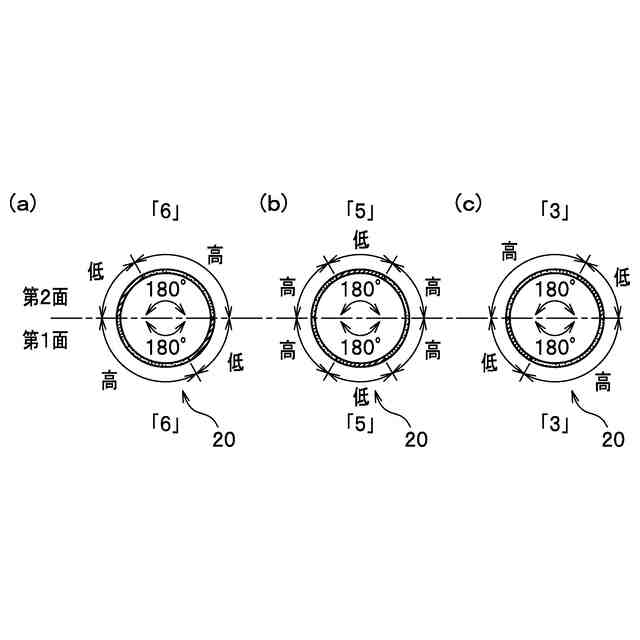
【解決手段】移動体が通行する経路に設置されるランドマーク3であって、柱状または錐状の立体形状部としての拡張部12を備え、前記立体形状部の表面には符号部20が設けられており、符号部20は、前記立体形状部の周方向に複数の分割領域を有しており、分割領域単位で反射強度が変更されることで符号パターンが表現されている。前記分割領域は、例えば、高反射強度領域と低反射強度領域との何れかであり、前記高反射強度領域および前記低反射強度領域を用いた配置のパターンによって二進数の符号パターンが表現されている。
【選択図】図4
特許請求の範囲
【請求項1】
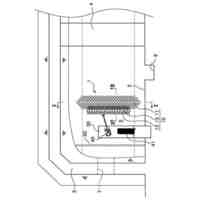
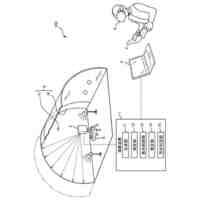
移動体が通行する経路に設置されるランドマークであって、
柱状または錐状の立体形状部、を備え、
前記立体形状部の表面には符号部が設けられており、
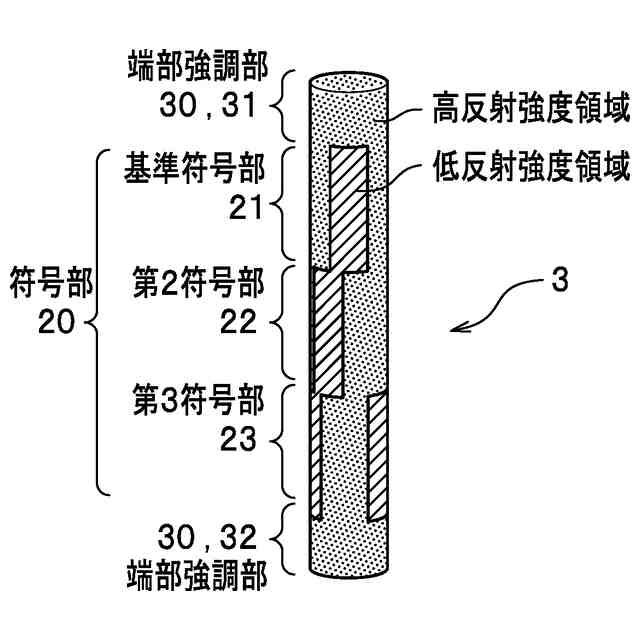
前記符号部は、前記立体形状部の周方向に複数の分割領域を有しており、分割領域単位で反射強度が変更されることで符号パターンが表現されている、
ことを特徴とするランドマーク。
続きを表示(約 830 文字)
【請求項2】
前記分割領域は、高反射強度領域と、低反射強度領域との何れかであり、
前記高反射強度領域および前記低反射強度領域を用いた配置のパターンによって二進数の符号パターンが表現されている、
ことを特徴とする請求項1に記載のランドマーク。
【請求項3】
前記符号部は、文字および記号の一方または双方を付した分割領域、ならびに、幅を変更した分割領域の何れか一方を有する、
ことを特徴とする請求項1に記載のランドマーク。
【請求項4】
前記符号部は、前記符号パターンの読み取り範囲を特定する基準符号部をさらに有する、
ことを特徴とする請求項1に記載のランドマーク。
【請求項5】
前記立体形状部の軸方向において前記符号部の片側または両側に設けられた端部強調部をさらに有する、
ことを特徴とする請求項1に記載のランドマーク。
【請求項6】
請求項1に記載のランドマークを用いた移動体の位置推定方法であって、
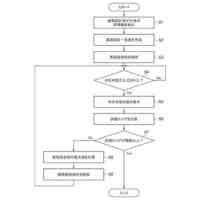
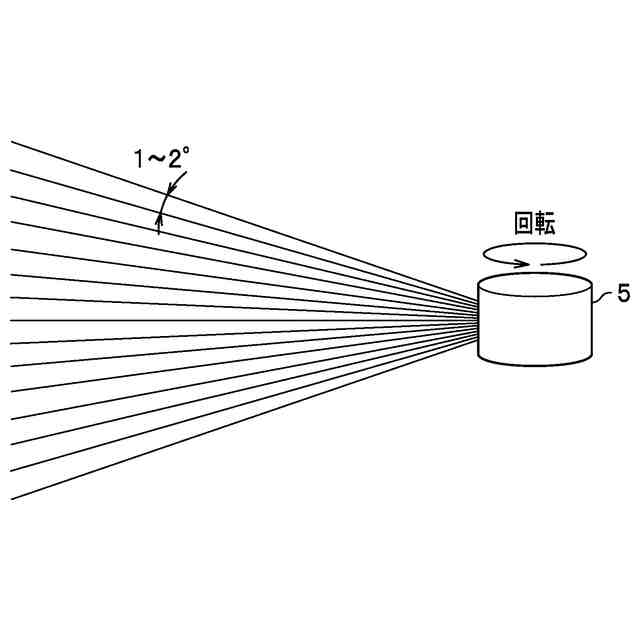
前記移動体が有する検出部を用いて点群データを取得する点群データ取得工程と、
前記点群データから前記ランドマークに対応する点群を検知するランドマーク検知工程と、
前記ランドマークとして認定した点群から前記符号パターンを読み取る符号パターン読み取り工程と、
前記読み取った符号パターンに基づいて位置を特定する位置特定工程と、を有する、
ことを特徴とする位置推定方法。
【請求項7】
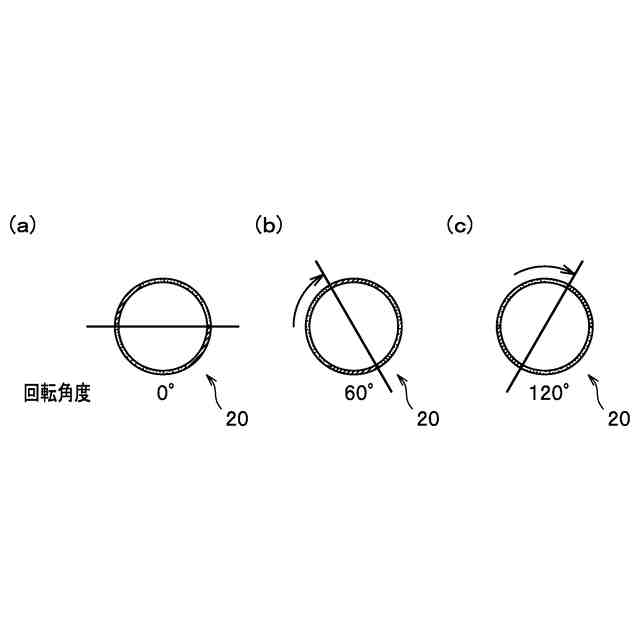
前記符号パターン読み取り工程では、読み取り角度が、一つの前記符号パターンの占める角度を示す符号表示角度以上になった場合に、当該符号パターンを読み取る、
ことを特徴とする請求項6に記載の位置推定方法。
【請求項8】
請求項6に記載の位置推定方法をコンピュータに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ランドマーク、位置推定方法、およびプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
自動運転において、自動運転車が自己位置を推定する上で必要なのは周囲の状況の把握である。そのため、自動運転では、Lidar(Light Detection and Ranging)と呼ばれるセンサによって自己位置を推定する技術が用いられる(例えば、特許文献1を参照)。この技術を用いる場合、自動運転車はLidarを備えており、Lidarによって取得したデータから周囲の状況を認識する。
【先行技術文献】
【特許文献】
【0003】
特開2023-038937号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
トンネルのような周囲の形状に変化が少ない環境、Lidarのレーザを吸収する物体(一例は雪)で覆われている環境では、自己位置を推定する精度が低下し、または推定ができないことが知られている。そのような環境の中で、道路標(視線誘導標やスノーポールを含む)は自己位置推定に利用しやすい数少ない対象である。
【0005】
しかし、道路標は、基本的に同じ仕様のものが使用されているため、形状や色などで個々の識別をすることが難しい。また、車道は、通行状況などによってオクルージョン(自動運転車から対象が隠れて見える現象)なども発生しやすく、すべての道路標を見逃さずに通行できる状況とは限らない。そのような状況で道路標を自己位置推定のランドマーク(目印)として用いた場合、位置関係が前後にある道路標などを意図せず混同するような結果となり、位置推定の誤差をむしろ拡大することも考えられる。
【0006】
このような観点から、本発明は、位置推定の精度を向上することが可能なランドマーク、位置推定方法、およびプログラムを提供する。
【課題を解決するための手段】
【0007】
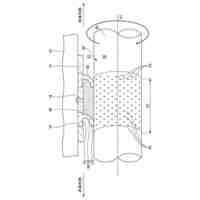
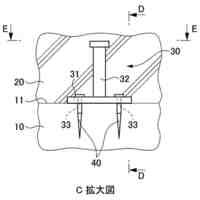
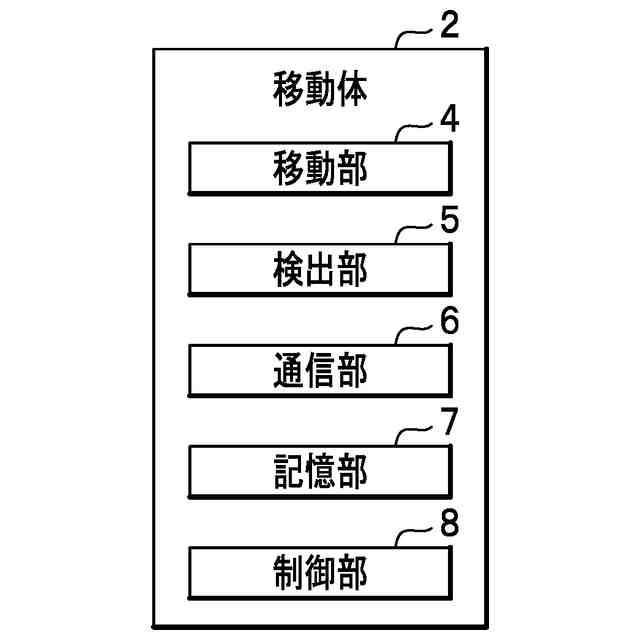
本発明に係るランドマークは、移動体が通行する経路に設置されるものである。このランドマークは、柱状または錐状の立体形状部を備え、前記立体形状部の表面には符号部が設けられている。前記符号部は、前記立体形状部の周方向に複数の分割領域を有しており、分割領域単位で反射強度が変更されることで符号パターンが表現されている。
【0008】
本発明に係るランドマークにおいては、当該ランドマークの識別情報や位置情報を符号パターンとして与えることが可能である。そのため、この符号パターンを読み取ることで、自己の位置を精度よく認識することができる。
【0009】
前記分割領域は、高反射強度領域と、低反射強度領域との何れかであり、前記高反射強度領域および前記低反射強度領域を用いた配置のパターンによって二進数の符号パターンを表現してもよい。
【0010】
前記符号部は、文字および記号の一方または双方を付した分割領域、ならびに、幅を変更した分割領域の何れか一方を有してもよい。
また、前記符号部は、前記符号パターンの読み取り範囲を特定する基準符号部をさらに有してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
大成建設株式会社
シール機構
1か月前
大成建設株式会社
新設構造物
1か月前
大成建設株式会社
木質複合構造
7日前
大成建設株式会社
廃棄物ならし装置
2か月前
大成建設株式会社
気体貯蔵放出材料
23日前
大成建設株式会社
摩擦制振ダンパー
1日前
大成建設株式会社
浮体式基礎の製作方法
25日前
大成建設株式会社
建物設計支援プログラム
2か月前
大成建設株式会社
推定装置および推定方法
1か月前
大成建設株式会社
推定装置および推定方法
1か月前
大成建設株式会社
炭酸カルシウムの製造方法
1か月前
大成建設株式会社
浚渫用施設および浚渫方法
16日前
大成建設株式会社
建物の健全性評価システム
1か月前
大成建設株式会社
無線給電システム及び移動体
21日前
大成建設株式会社
建築物風騒音の簡易評価方法
2か月前
大成建設株式会社
基礎杭の損傷程度推定システム
2か月前
大成建設株式会社
試料採取装置および特性評価方法
1か月前
大成建設株式会社
地震時要救助者位置推定システム
1か月前
大成建設株式会社
切羽観察システム及び切羽観察方法
1か月前
大成建設株式会社
パッカー装置および湧水圧測定方法
2か月前
大成建設株式会社
汚泥処理方法および汚泥処理システム
28日前
地中空間開発株式会社
トンネル掘削機
1か月前
大成建設株式会社
水槽構造物および水槽構造物の施工方法
16日前
大成建設株式会社
静的コーン試験装置と静的コーン試験方法
1か月前
大成建設株式会社
シールド工事用充填材、及びシールド工法
1か月前
大成建設株式会社
シールド到達構造およびシールド到達方法
16日前
大成建設株式会社
粒状体撒き出し装置および地盤模型作製方法
2か月前
大成建設株式会社
水中不分離性モルタル組成物、及び、その部材
16日前
大成建設株式会社
吊荷向き制御システムおよびブレード設置方法
8日前
大成建設株式会社
浮体式基礎の製作方法及び洋上風車の製作方法
25日前
大成建設株式会社
浮体式基礎の製作方法及び洋上風車の製作方法
25日前
大成建設株式会社
ランドマーク、位置推定方法、およびプログラム
1か月前
大成建設株式会社
コンクリート組成物、及び、コンクリート部材の製造方法
1か月前
大成建設株式会社
土量計測システム、土量計測方法、初期化方法及び保護構造
1か月前
大成建設株式会社
接触回避システム
15日前
大成建設株式会社
切替バルブ、コンクリート打設装置および覆工コンクリート打設方法
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ