TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133869
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2025113021,2021134557
出願日
2025-07-03,2021-08-20
発明の名称
接触回避システム
出願人
大成建設株式会社
代理人
弁理士法人磯野国際特許商標事務所
主分類
E02F
9/24 20060101AFI20250904BHJP(水工;基礎;土砂の移送)
要約
【課題】従来よりも効率的に工事を進めることができる。
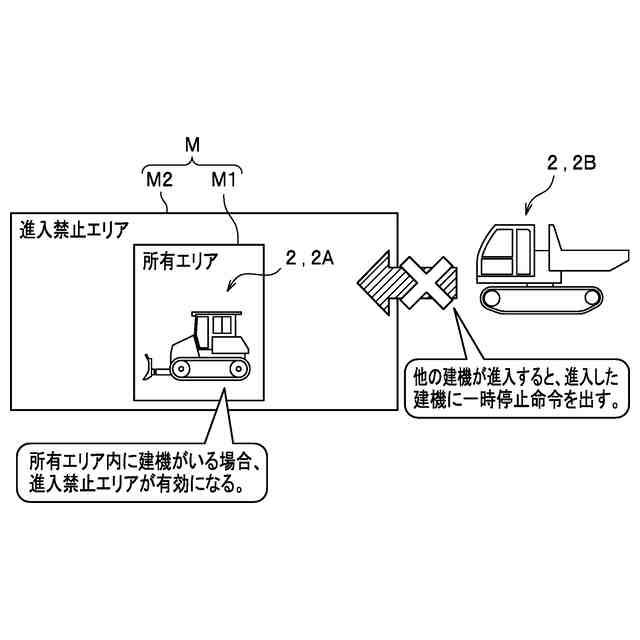
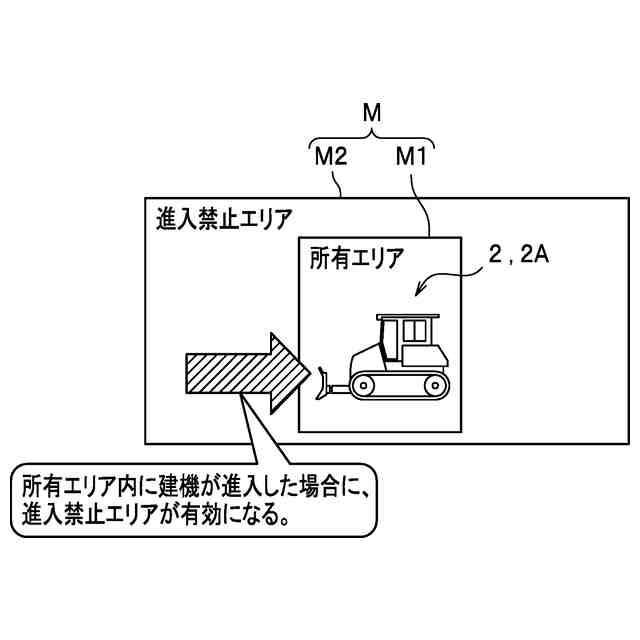
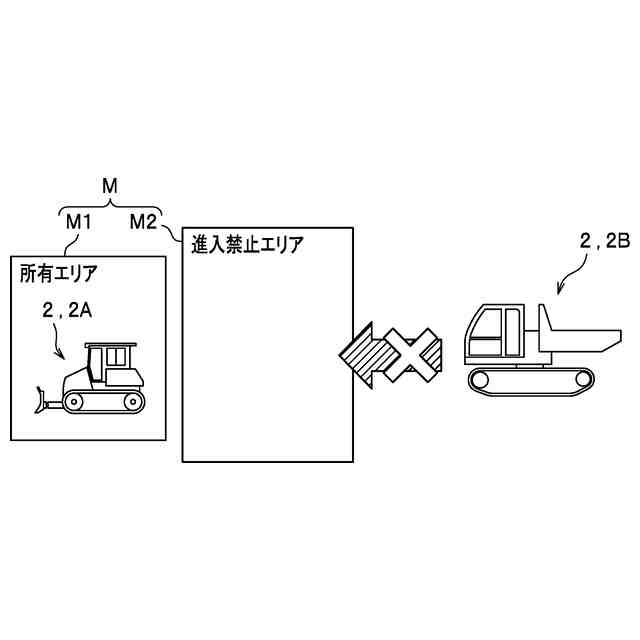
【解決手段】接触回避システムは、複数の建設機械2を用いた工事において建設機械同士の接触を回避させるシステムであって、各々の建設機械2の位置情報を取得する位置取得手段と、前記位置取得手段が取得した前記各々の建設機械2の位置情報に基づいて、複数の建設機械2による群制御を行う制御装置と、を備え、前記制御装置は、工事エリアの一部に予め設定された所有エリアM1に第一の建設機械2Aが進入した場合に、所有エリアM1および当該所有エリアM1に付随する進入禁止エリアM2へ第二の建設機械2Bが進入することを制限する制限開始制御を行い、第一の建設機械2Aが所有エリアM1から退出した場合に、第二の建設機械2Bによる所有エリアM1および進入禁止エリアM2への進入の制限を解除する制限解除制御を行う。
【選択図】図4
特許請求の範囲
【請求項1】
複数の建設機械を用いた工事において建設機械同士の接触を回避させる接触回避システムであって、
各々の建設機械の位置情報を取得する位置取得手段と、
前記位置取得手段が取得した前記各々の建設機械の位置情報に基づいて、複数の建設機械による群制御を行う制御装置と、を備え、
前記制御装置は、
工事エリアの一部に予め設定された所有エリアに第一の建設機械が進入した場合に、前記所有エリアおよび当該所有エリアに付随する進入禁止エリアへ第二の建設機械が進入することを制限する制限開始制御を行い、
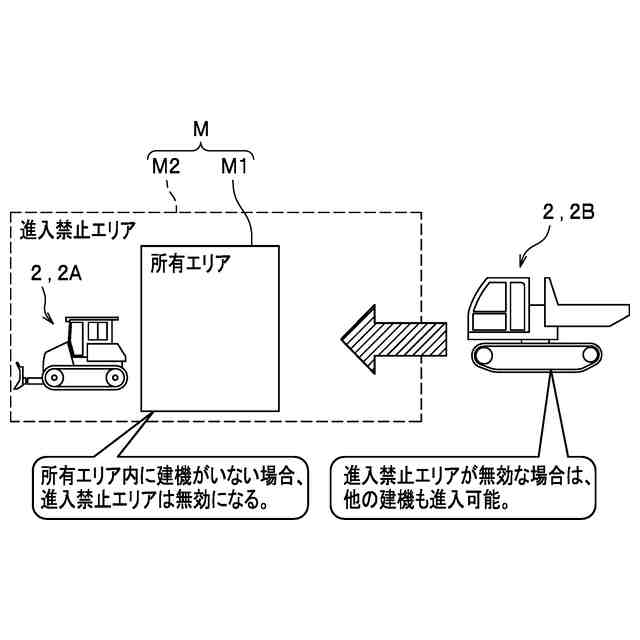
前記第一の建設機械が前記所有エリアから退出した場合に、前記第二の建設機械による前記所有エリアおよび前記進入禁止エリアへの進入の制限を解除する制限解除制御を行う、
ことを特徴とする接触回避システム。
続きを表示(約 990 文字)
【請求項2】
前記第二の建設機械は、自動運転によって作業を行うものであり、
前記第二の建設機械は、自動運転を制御する車載制御装置を備え、
前記制御装置は、前記制限開始制御として前記車載制御装置に対して一時停止命令を送り、前記制限解除制御として前記車載制御装置に対して再開命令を送る、
ことを特徴とする請求項1に記載の接触回避システム。
【請求項3】
前記第二の建設機械は、有人運転によって作業を行うものであり、
前記第二の建設機械の操縦者が視認可能な表示装置をさらに備え、
前記制御装置は、前記制限開始制御として前記表示装置の画面に一時停止命令を表示させ、前記制限解除制御として前記表示装置の画面に再開命令を表示させる、
ことを特徴とする請求項1に記載の接触回避システム。
【請求項4】
前記進入禁止エリアは、前記所有エリアを含み、当該所有エリアよりも広い範囲である、ことを特徴とする請求項1ないし請求項3の何れか一項に記載の接触回避システム。
【請求項5】
前記進入禁止エリアは、前記所有エリアと同じ範囲である、ことを特徴とする請求項1ないし請求項3の何れか一項に記載の接触回避システム。
【請求項6】
前記進入禁止エリアは、前記所有エリアと重複しない工事エリア内の別のエリアである、ことを特徴とする請求項1ないし請求項3の何れか一項に記載の接触回避システム。
【請求項7】
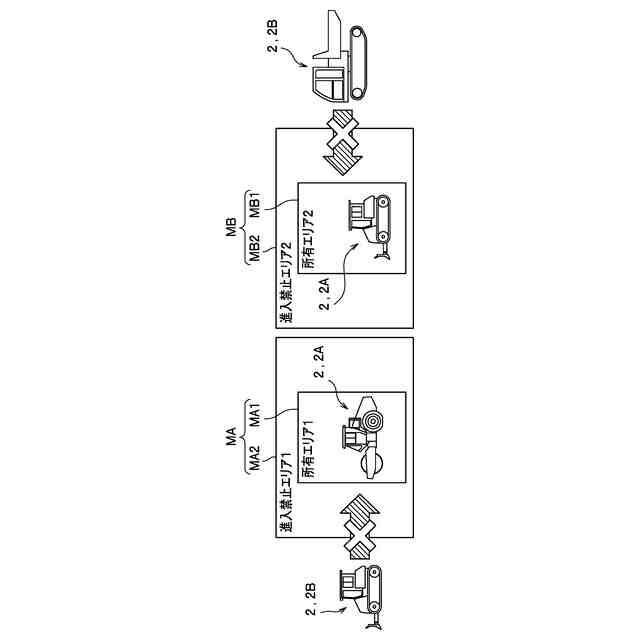
前記工事エリアには、第一の所有エリアと第二の所有エリアとが設定されており、
前記制御装置は、各々の所有エリアで前記制限開始制御および前記制限解除制御を行う、
ことを特徴とする請求項1ないし請求項3の何れか一項に記載の接触回避システム。
【請求項8】
前記工事エリアには、前記第一の所有エリアの一部と前記第二の所有エリアの一部とが重複して設定されている、
ことを特徴とする請求項7に記載の接触回避システム。
【請求項9】
前記所有エリアおよび前記進入禁止エリアは、手動および自動の何れかの方法によって設定されたものである、
ことを特徴とする請求項1ないし請求項8の何れか一項に記載の接触回避システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、接触回避システムに関する。
続きを表示(約 3,800 文字)
【背景技術】
【0002】
自動運転機能を有した建設機械を用いた施工システムが提案されている(例えば、特許文献1参照)。特許文献1に記載される技術は、異なる作業を複数の建設機械を自動運転で作業させるものであり、施工管理部から複数の建設機械に作業開始指令及び施工位置情報をそれぞれ送信することにより、各建設機械が施工位置情報に基づいてそれぞれ作業する。
【先行技術文献】
【特許文献】
【0003】
特開2016-132912号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、建設機械を用いた工事内容は多岐にわたり、複数の建設機械が同一エリア内で輻輳することも想定される。従来では、建設機械にカメラやレーダ等のセンサを設置して建設機械同士の接触を監視し、接触の可能性がある場合に建設機械を緊急停止させるのが一般的である。その為、接触を回避するための停止は、建設機械にとっては意図しない制御になり、例えば安全を十分に確認してからの作業再開となるので作業が遅延するという問題があった。また、場合によっては作業を開始するための設定を再度行わなければならず、大変な手間になるという問題があった。
このような観点から、本発明は、従来よりも効率的に工事を進めることができる接触回避システムを提供する。
【課題を解決するための手段】
【0005】
本発明に係る接触回避システムは、複数の建設機械を用いた工事において建設機械同士の接触を回避させる接触回避システムである。この接触回避システムは、各々の建設機械の位置情報を取得する位置取得手段と、前記位置取得手段が取得した前記各々の建設機械の位置情報に基づいて、複数の建設機械による群制御を行う制御装置とを備える。
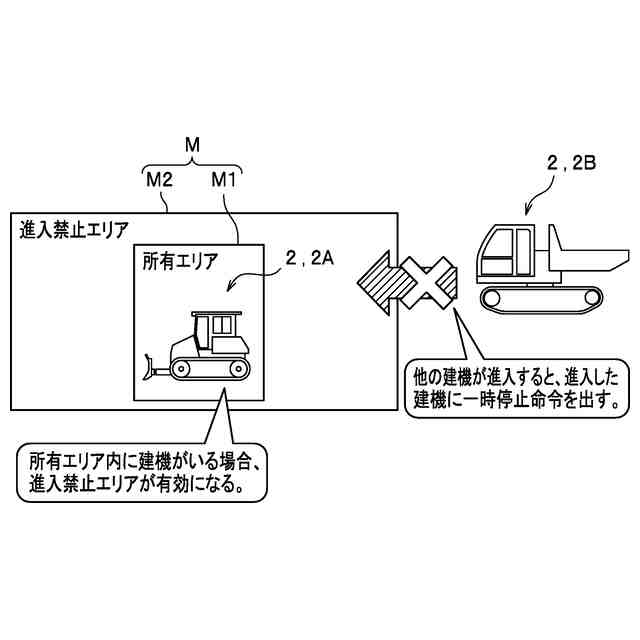
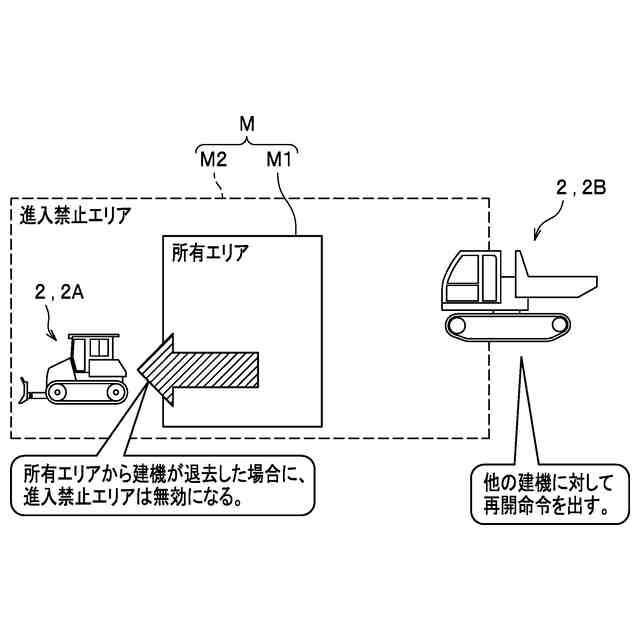
前記制御装置は、工事エリアの一部に予め設定された所有エリアに第一の建設機械が進入した場合に、前記所有エリアおよび当該所有エリアに付随する進入禁止エリアへ第二の建設機械が進入することを制限する制限開始制御を行う。また、前記第一の建設機械が前記所有エリアから退出した場合に、前記第二の建設機械による前記所有エリアおよび前記進入禁止エリアへの進入の制限を解除する制限解除制御を行う。
本発明に係る接触回避システムにおいては、第一の建設機械がいる所有エリアに第二の建設機械が進入することを防ぐことができる。その為、所有エリアで作業を行う第一の建設機械は、中断することなく作業を行うことが可能である。その結果、従来よりも効率的に工事を進めることができる。
また、進入禁止エリアが緩衝領域やバリケードのような役割を担うので、建設機械同士の接触を確実に防止することが可能である。
【0006】
前記第二の建設機械は、自動運転によって作業を行うものであってよい。その場合、前記第二の建設機械は、自動運転を制御する車載制御装置を備え、前記制御装置は、前記制限開始制御として前記車載制御装置に対して一時停止命令を送り、前記制限解除制御として前記車載制御装置に対して再開命令を送る。なお、前記第一の建設機械は、自動運転によって作業を行うもの、有人運転によって作業を行うものの何れであってもよい。
また、前記第二の建設機械は、有人運転によって作業を行うものであってよい。その場合、前記第二の建設機械の操縦者が視認可能な表示装置をさらに備え、前記制御装置は、前記制限開始制御として前記表示装置の画面に一時停止命令を表示させ、前記制限解除制御として前記表示装置の画面に再開命令を表示させる。
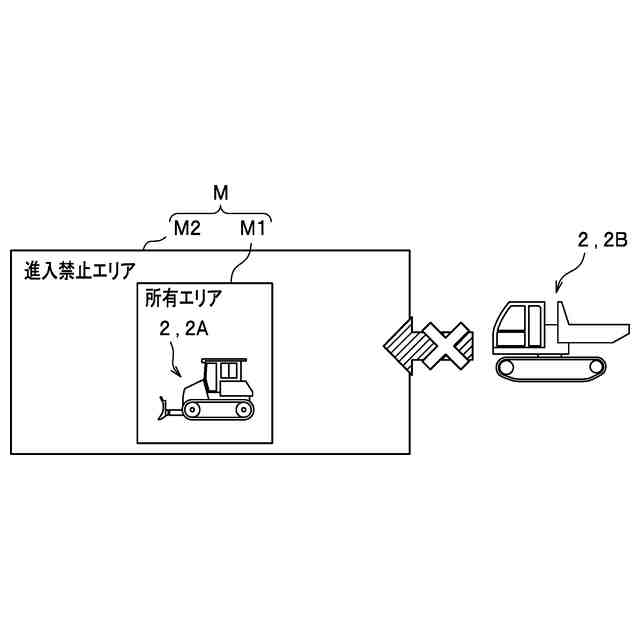
前記進入禁止エリアは、前記所有エリアを含み、当該所有エリアよりも広い範囲とすることができる。
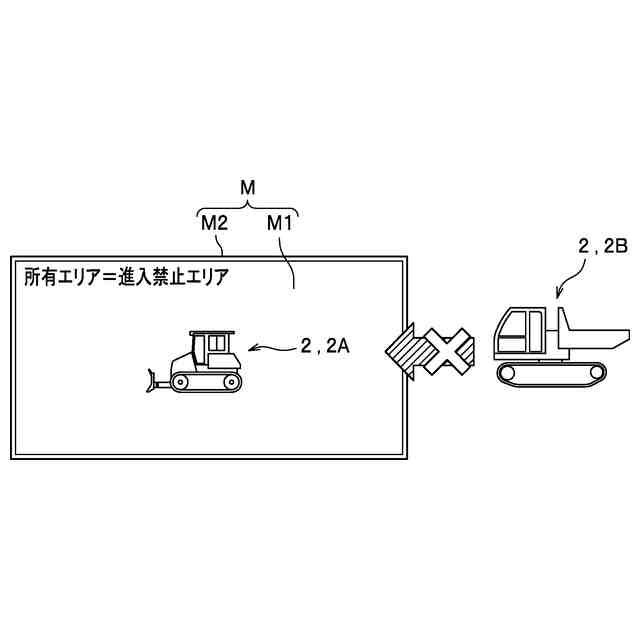
また、前記進入禁止エリアは、前記所有エリアと同じ範囲とすることができる。
また、前記進入禁止エリアは、前記所有エリアと重複しない工事エリア内の別のエリアとすることができる。
また、前記工事エリアには、第一の所有エリアと第二の所有エリアとを設定することができる。その場合、前記制御装置は、各々の所有エリアで前記制限開始制御および前記制限解除制御を行う。なお、三つ以上の所有エリアを工事エリアに設定することも可能である。
また、前記工事エリアには、前記第一の所有エリアの一部と前記第二の所有エリアの一部とを重複して設定することができる。
また、前記所有エリアおよび前記進入禁止エリアは、手動および自動の何れかの方法によって設定されたものであってよい。
【発明の効果】
【0007】
本発明によれば、従来よりも効率的に工事を進めることができる。
【図面の簡単な説明】
【0008】
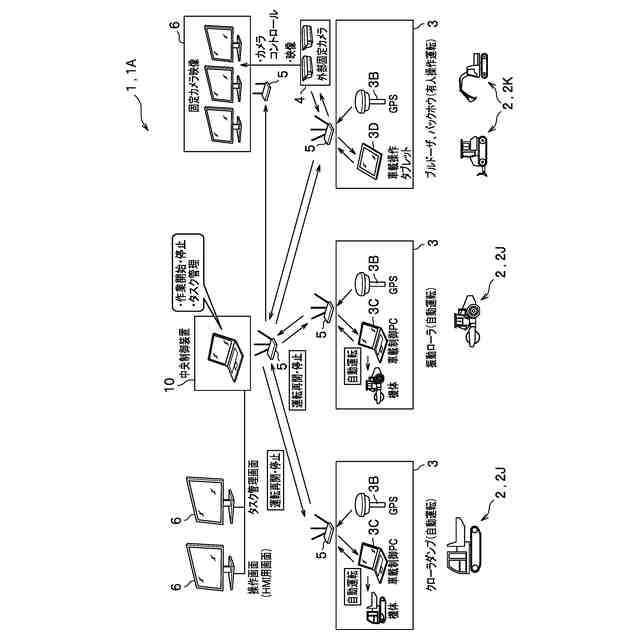
本発明の実施形態に係る接触回避システムを含んだ施工システムの概略構成図である。
接触回避機能を説明するための図であり、所有エリアに建設機械がいない状態を示している。
接触回避機能を説明するための図であり、所有エリアに建設機械が進入した状態を示している。
接触回避機能を説明するための図であり、所有エリアに建設機械が進入した状態を示している。
接触回避機能を説明するための図であり、所有エリアから建設機械が退出した状態を示している。
排他エリアの第1のバリエーションを示す図である。
排他エリアの第2のバリエーションを示す図である。
排他エリアの第3のバリエーションを示す図である。
排他エリアの第4のバリエーションを示す図である。
排他エリアの第5のバリエーションを示す図である。
排他エリアの第2のバリエーションの使用態様の一例を示す図である。
排他エリアの第2のバリエーションの使用態様の一例を示す図である。
排他エリアの第3のバリエーションの使用態様の一例を示す図である。
複数の建設機械の作業が排他エリアで競合する場合の処理を示したシーケンス図である。
エリアの設定画面(施工エリア設定画面)の例示である。
エリアの設定画面(排他エリア編集画面)の例示である。
【発明を実施するための形態】
【0009】
以下、本発明の実施をするための形態を、適宜図面を参照しながら詳細に説明する。各図は、本発明を十分に理解できる程度に、概略的に示してあるに過ぎない。よって、本発明は、図示例のみに限定されるものではない。なお、各図において、共通する構成要素や同様な構成要素については、同一の符号を付し、それらの重複する説明を省略する。
<実施形態に係る接触回避システムの構成について>
図1を参照して、第1実施形態に係る接触回避システム1Aの構成について説明する。図1は、接触回避システム1Aを含んだ施工システム1の概略構成図である。接触回避システム1Aは、他のシステムの一部を構成するものであって、本実施形態では複数の建設機械を用いて工事を行う施工システム1の一部をなすものを想定する。
施工システム1は、例えば、建設機械を自動で運転させる自動運転システム、建設機械の有人運転を支援する運転支援システム、建設機械同士の接触を回避させる接触回避システム1Aなどを含む。以降では、接触回避システム1Aについて特に説明を行い、施工システム1が有する他の機能であって、接触回避システム1Aに関連しないものは説明を省略する場合がある。なお、これらのシステムの分類は、説明の便宜上のものであり、発明を限定するものではない。
【0010】
接触回避システム1Aは、施工システム1の中で建設機械同士の接触を回避する役割を担うシステムであり、他のシステム(例えば、自動運転システム、運転支援システムなど)と連携して動作する。つまり、接触回避システム1Aは、他のシステムから必要に応じて情報を取得し、また他のシステムからの要求に応じて自身が保有する情報を提供する。接触回避システム1Aが接触を回避させる建設機械には、自動運転される建設機械および有人運転される建設機械が含まれ、接触回避システム1Aでは、例えば自動運転される建設機械同士の接触、有人運転される建設機械同士の接触、および自動運転される建設機械と有人運転される建設機械との接触を何れも回避できる。
図1に示すように、施工システム1は、複数の建設機械2と、各々の建設機械2に搭載される車載機器群3と、工事エリアの映像を撮影する外部固定カメラ4と、情報の通信を行う複数の通信装置5と、複数のモニタ6と、施工システム1の全体を制御する中央制御装置10(制御装置)とを主に備える。接触回避システム1Aは、これらのハードウェアの一部を用いて、建設機械2同士の接触の回避を実現する。
建設機械2(車載機器群3を含む)および外部固定カメラ4は、例えば工事エリアに設置される。各種のモニタ6および中央制御装置10は、例えば監視室に設置される。通信装置5は、例えば工事エリアおよび監視室の両方に設置される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ