TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025115578
公報種別
公開特許公報(A)
公開日
2025-08-07
出願番号
2024010100
出願日
2024-01-26
発明の名称
慣性力設定装置、慣性力設定システム及び慣性力設定方法
出願人
国立大学法人 筑波大学
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01N
3/00 20060101AFI20250731BHJP(測定;試験)
要約
【課題】実際の旋回運動を伴わずに、動的な慣性力の影響を受けた状態での旋回体の特性を計測する。
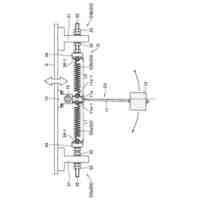
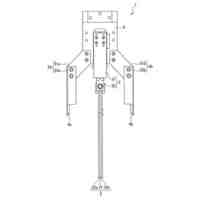
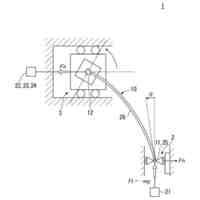
【解決手段】慣性力設定装置は、旋回体の一端側の第1部分を保持するとともに前記旋回体の旋回運動に伴う鉛直方向における前記第1部分の変位を許容しかつ水平方向における前記第1部分の変位を制限する第1保持部と、前記第1部分とは異なる第2部分を保持するとともに前記水平方向における前記第2部分の変位を許容しかつ前記鉛直方向における前記第2部分の変位を制限する第2保持部と、前記第1部分に働く接線方向の力を任意の接線方向慣性力に設定可能に構成された接線方向慣性力設定部と、前記第1部分に働く法線方向の力を任意の法線方向慣性力に設定可能に構成された法線方向慣性力設定部と、前記旋回体に対して前記旋回運動を行わせるよう前記第2部分に働くモーメントを任意のモーメントに設定可能に構成されたモーメント設定部と、を備える。
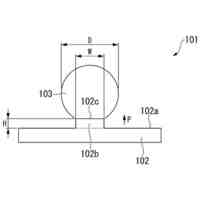
【選択図】図1
特許請求の範囲
【請求項1】
旋回体に働く慣性力を設定する慣性力設定装置であって、
前記旋回体の一端側の第1部分を保持するとともに、前記旋回体の旋回運動に伴う鉛直方向における前記第1部分の変位を許容しかつ水平方向における前記第1部分の変位を制限するよう構成された第1保持部と、
前記旋回体の前記第1部分とは異なる第2部分を保持するとともに、前記水平方向における前記第2部分の変位を許容しかつ前記鉛直方向における前記第2部分の変位を制限するよう構成された第2保持部と、
前記第1部分に働く接線方向の力を任意の接線方向慣性力に設定可能に構成された接線方向慣性力設定部と、
前記第1部分に働く法線方向の力を任意の法線方向慣性力に設定可能に構成された法線方向慣性力設定部と、
前記旋回体に対して前記旋回運動を行わせるよう前記第2部分に働くモーメントを任意のモーメントに設定可能に構成されたモーメント設定部と、を備える、
慣性力設定装置。
続きを表示(約 960 文字)
【請求項2】
前記モーメントを計測するモーメント計測部を更に備える、
請求項1に記載の慣性力設定装置。
【請求項3】
前記第1部分に対して前記接線方向慣性力及び/又は前記法線方向慣性力が働いている状態で前記旋回体がたわむときに生じるたわみ角を計測するたわみ角計測部を更に備える、
請求項1又は2に記載の慣性力設定装置。
【請求項4】
前記たわみ角計測部は、前記たわみ角として、たわんでいる前記第1部分の接線と前記鉛直方向に沿う直線とがなす角度を計測する、
請求項3に記載の慣性力設定装置。
【請求項5】
前記旋回体は、シャフトである、
請求項1又は2に記載の慣性力設定装置。
【請求項6】
請求項1又は2に記載の慣性力設定装置と、
前記慣性力設定装置を制御する制御部と、を備える、
慣性力設定システム。
【請求項7】
前記制御部は、前記第1部分に対して前記接線方向慣性力及び/又は前記法線方向慣性力が働いている状態で前記旋回体がたわむときに生じるたわみ角に基づいて前記第2部分に働くモーメントを操作し、角度θを0に制御する、
請求項6に記載の慣性力設定システム。
【請求項8】
前記制御部は、角度θ=0を満たすために必要なモーメントMを算出しておき、実際の実験での角度θの値をフィードバックして、理論的に算出されたMに加えて、実験においてθを0にするような操作をする、
請求項7に記載の慣性力設定システム。
【請求項9】
請求項6に記載の慣性力設定システムを用いた慣性力設定方法であって、
前記第1部分に対して前記接線方向慣性力及び/又は前記法線方向慣性力が働いている状態で前記旋回体がたわむときに生じるたわみ角に基づいて前記第2部分に働くモーメントを操作し、角度θを0に制御する制御ステップを有し、
前記制御ステップでは、角度θ=0を満たすために必要なモーメントMを算出しておき、実際の実験での角度θの値をフィードバックして、理論的に算出されたMに加えて、実験においてθを0にするような操作をする、
慣性力設定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、慣性力設定装置、慣性力設定システム及び慣性力設定方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
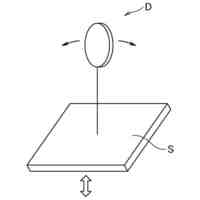
スイング時におけるシャフトの動特性及びスイング中に人間の手が受ける把持力・把持モーメント等の計測は、実際にスイングを行って計測する必要がある。この際、センサをシャフトに取り付けるため、センサ自体の重さ等が加わり、実際のスイング時のシャフトの動特性及び把持力・把持モーメント等を計測することは不可能であった。
一方、シャフトに関する特性試験法としては下記の文献がある。
特許文献1には、シャフトのねじり剛性分布の測定方法及び測定装置が開示されている。
特許文献2には、ゴルフクラブシャフトのたわみ特性の評価方法が開示されている。
特許文献3には、ゴルフクラブシャフトの曲がり調子の測定方法及び測定装置が開示されている。
非特許文献1には、流体を搬送する片持ちパイプの自励振動の複素モード形状を実験的に固定する方法が開示されている。
非特許文献2には、鉛直に吊り下げられた片持ち弾性送水管の横振動に関し、管上端が水平方向に加振される場合が開示されている。
非特許文献1,2には、本出願内容において用いた式のもとになる運動方程式が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第3337364号公報
特許第3445630号公報
特許第3086353号公報
【非特許文献】
【0004】
Method of experimentally identifying the complex mode shape of the self-excited oscillation of a cantilevered pipe conveying fluid, Eisuke Higuchi, Hiroshi Yabuno, Kiyotaka Yamashita, Nonlinear Dyn (2022) 109:589-604, https://doi.org/10.1007/s11071-022-07460-0
鉛直に吊り下げられた片持ち弾性送水管の横振動:管上端が水平方向に加振される場合、吉沢正紹、上野和夫、長谷川英治、辻岡康、日本機械学会論文集C編(1988)54巻497号 pp. 100-107,https://doi.org/10.1299/kikaic.54.100
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の文献が開示する技術は、静的な荷重に対する性能を計測するものであり、動的な慣性力の影響を受けた状態でのシャフトの特性を計測するものではない。そのため、シャフトなどの旋回運動を行う旋回体について、実際の旋回運動を伴わずに、動的な慣性力の影響を受けた状態での旋回体の特性を計測することが望まれている。
【0006】
そこで本発明は、実際の旋回運動を伴わずに、動的な慣性力の影響を受けた状態での旋回体の特性を計測することができる慣性力設定装置、慣性力設定システム及び慣性力設定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の一態様に係る慣性力設定装置は、旋回体に働く慣性力を設定する慣性力設定装置であって、前記旋回体の一端側の第1部分を保持するとともに、前記旋回体の旋回運動に伴う鉛直方向における前記第1部分の変位を許容しかつ水平方向における前記第1部分の変位を制限するよう構成された第1保持部と、前記旋回体の前記第1部分とは異なる第2部分を保持するとともに、前記水平方向における前記第2部分の変位を許容しかつ前記鉛直方向における前記第2部分の変位を制限するよう構成された第2保持部と、前記第1部分に働く接線方向の力を任意の接線方向慣性力に設定可能に構成された接線方向慣性力設定部と、前記第1部分に働く法線方向の力を任意の法線方向慣性力に設定可能に構成された法線方向慣性力設定部と、前記旋回体に対して前記旋回運動を行わせるよう前記第2部分に働くモーメントを任意のモーメントに設定可能に構成されたモーメント設定部と、を備える。
【発明の効果】
【0008】
上記態様によれば、実際の旋回運動を伴わずに、動的な慣性力の影響を受けた状態での旋回体の特性を計測することができる慣性力設定装置、慣性力設定システム及び慣性力設定方法を提供することができる。
【図面の簡単な説明】
【0009】
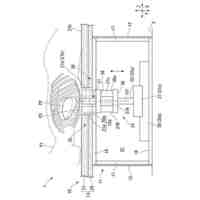
実施形態に係る慣性力設定装置を示す模式図。
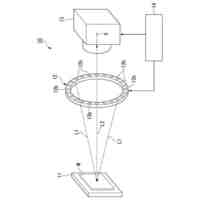
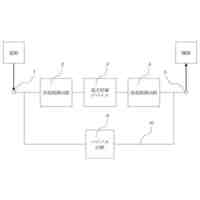
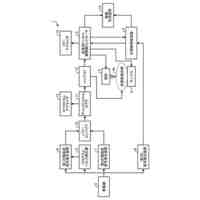
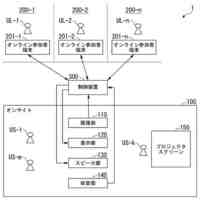
実施形態に係る慣性力設定システムを示すブロック図。
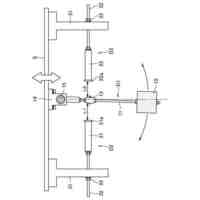
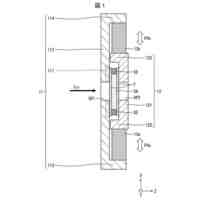
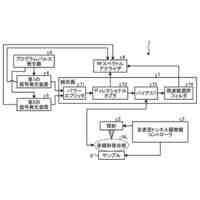
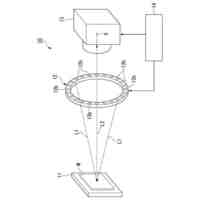
実施形態に係る慣性力設定装置の一例を示す側面図。
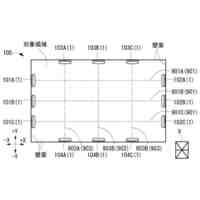
図3のIV矢視図。
実施形態のシャフトに働く慣性力等の説明図。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照して説明する。実施形態においては、慣性力設定装置の一例として、シャフト(旋回体の一例)に働く慣性力を設定する慣性力設定装置の例を挙げて説明する。以下、シャフト上の各点の軸に接する方向を接線方向と呼び、それと直交する方向を法線方向と呼ぶ。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
国立大学法人 筑波大学
制振機構
1か月前
国立大学法人 筑波大学
制振機構
1か月前
国立大学法人 筑波大学
制振機構
1か月前
国立大学法人 筑波大学
表面検査方法
6か月前
国立大学法人 筑波大学
超音波検査装置
2か月前
国立大学法人 筑波大学
電力平準化装置
6か月前
国立大学法人 東京大学
せん妄判定方法
3か月前
国立大学法人 筑波大学
火災検出システム
1か月前
国立大学法人 筑波大学
火災検出システム
1か月前
国立大学法人 筑波大学
火災検出システム
1か月前
国立大学法人 筑波大学
火災検出システム
1か月前
国立大学法人 筑波大学
レオロジー測定装置
1か月前
国立大学法人 筑波大学
麹菌組織物の製造方法
2か月前
国立大学法人東京海洋大学
熱電池用電解液、熱電池
8か月前
国立大学法人 筑波大学
がん抑制剤およびがん抑制用医薬
1か月前
NTT株式会社
復号装置及び復号方法
1か月前
国立大学法人 筑波大学
測定装置、観察システム、及び測定方法
3か月前
国立大学法人 筑波大学
測定方法、測定装置、及び観察システム
3か月前
国立大学法人 筑波大学
フィラグリン遺伝子型決定法およびキット
3か月前
国立大学法人 筑波大学
微生物、植物成長補助剤、及び植物の生育方法
4か月前
国立大学法人 筑波大学
振り子装置、制振装置及び制振装置の設計方法
7か月前
国立大学法人 筑波大学
オンサイト参加システム及びオンサイト参加方法
3か月前
国立大学法人 筑波大学
補正装置、撮影装置、補正方法および撮影システム
3か月前
国立大学法人 筑波大学
殺虫剤、殺虫活性を有する新規化合物及びその用途
11日前
NTT株式会社
映像処理装置、方法及びプログラム
1か月前
国立大学法人 筑波大学
紙及びその製造方法並びに紙用改質剤及びその製造方法
6か月前
NTT株式会社
情報処理装置、方法およびプログラム
2か月前
NTT株式会社
推論装置、推論方法、及びプログラム
3か月前
国立大学法人 筑波大学
モデル図作成方法、情報処理システムおよびプログラム
9か月前
国立大学法人 筑波大学
慣性力設定装置、慣性力設定システム及び慣性力設定方法
3か月前
NTT株式会社
データ解析装置、方法およびプログラム
2か月前
国立大学法人 筑波大学
放射線遮蔽材用焼結体粒子、その製造方法及びその使用方法
26日前
国立大学法人 筑波大学
光学素子、光線制御装置とその製造方法、およびディスプレイ
28日前
NTT株式会社
情報処理装置、情報処理方法及びプログラム
2か月前
三菱重工業株式会社
水素吸蔵材料、水素放出・貯蔵システム
8か月前
国立大学法人 筑波大学
表面検査装置
4か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ