TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025109851
公報種別
公開特許公報(A)
公開日
2025-07-25
出願番号
2025080417,2021119101
出願日
2025-05-13,2021-07-19
発明の名称
システム
出願人
小橋工業株式会社
代理人
弁理士法人高橋・林アンドパートナーズ
主分類
A01B
35/00 20060101AFI20250717BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】走行機体の機種と農作業機の機種との組み合わせに応じた制御条件を自動的に設定すること。
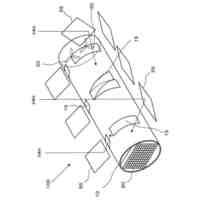
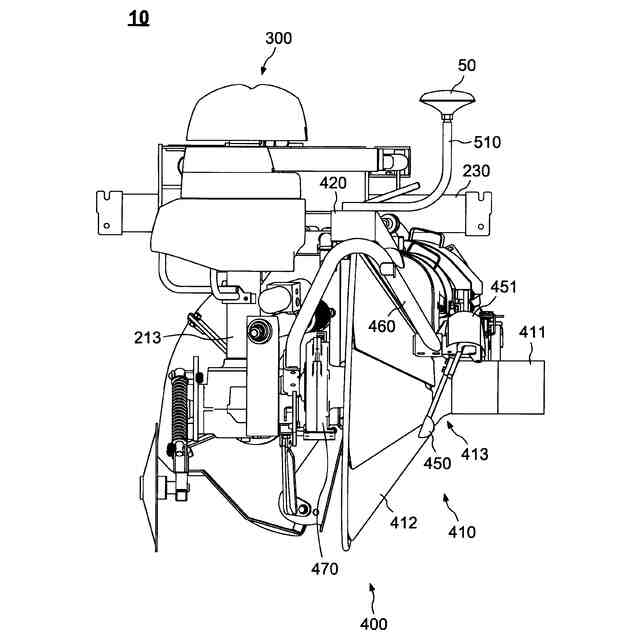
【解決手段】システムは、畦を形成する畦形成部を備えた畦塗り機と、前記畦塗り機に設けられた位置検出器と、前記位置検出器によって検出された第1位置情報に基づいて畦の形状を導出する情報処理装置と、を有する。前記畦塗り機に設けられ、前記畦塗り機によって形成された又は形成される畦付近に存在する障害物を検知する障害物検知部をさらに有してもよい。前記情報処理装置は、前記障害物検知部によって検知された障害物の第2位置情報を、前記第1位置情報に重ねて記録してもよい。
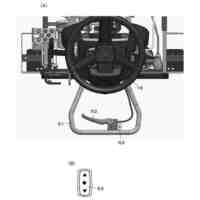
【選択図】図1
特許請求の範囲
【請求項1】
畦を形成する畦形成部を備えた畦塗り機と、
前記畦塗り機に設けられた位置検出器と、
前記位置検出器によって検出された第1位置情報に基づいて畦の形状を導出する情報処理装置と、を有するシステム。
続きを表示(約 250 文字)
【請求項2】
前記畦塗り機に設けられ、前記畦塗り機によって形成された又は形成される畦付近に存在する障害物を検知する障害物検知部をさらに有し、
前記情報処理装置は、前記障害物検知部によって検知された障害物の第2位置情報を、前記第1位置情報に重ねて記録する、請求項1に記載のシステム。
【請求項3】
前記情報処理装置は、前記畦の形状に関する情報を、前記畦塗り機以外の他の農作業機又は前記農作業機を操作する作業者の通信端末に送信する、請求項1又は2に記載のシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は畦の形状を取得する情報処理装置、プログラム、及びシステムに関する。特に、本発明は、畦塗り機に設けられた位置検出器を用いて畦の形状を取得するための情報処理装置、プログラム、及びシステムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
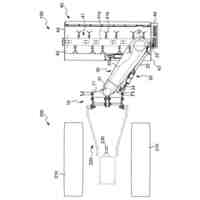
現在、農作業の労働時間を軽減するために農作業機のオートマチック化が進められ、様々な農作業機が開発されている。特に、トラクタ等の走行機体の後方に装着され、畦塗り、耕耘、及び代かきなどの作業の種類に応じて交換可能な農作業機(畦塗り機、耕耘機、及び代かき機)は、走行機体に対してアタッチメントのように交換するだけで様々な農作業に対応することが可能であり、農作業のコスト低減に大きく寄与している。
【0003】
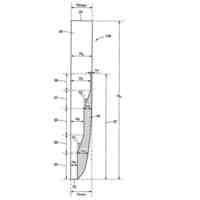
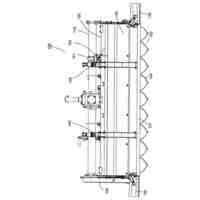
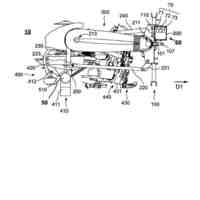
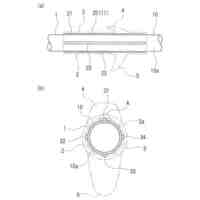
上記の農作業機のうち、特に畦塗り機は、作業者による手作業では実現が難しい高精度かつ高強度の畦を形成することができる点で非常に有用である。畦塗り機は、ロータなどによって圃場の土を耕耘し、耕耘された土をドラムなどの畦形成部によって押し固めることで、畦を形成する。近年、畦を形成している位置や畦が形成された位置を把握するために、位置検出器(例えば、GNSSアンテナ)を用いながら畦塗作業をおこなう農作業機が提案されている(特許文献1)。特許文献1における農作業機では、位置検出器は走行機体に設けられていた。
【先行技術文献】
【特許文献】
【0004】
特開2020-099240号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
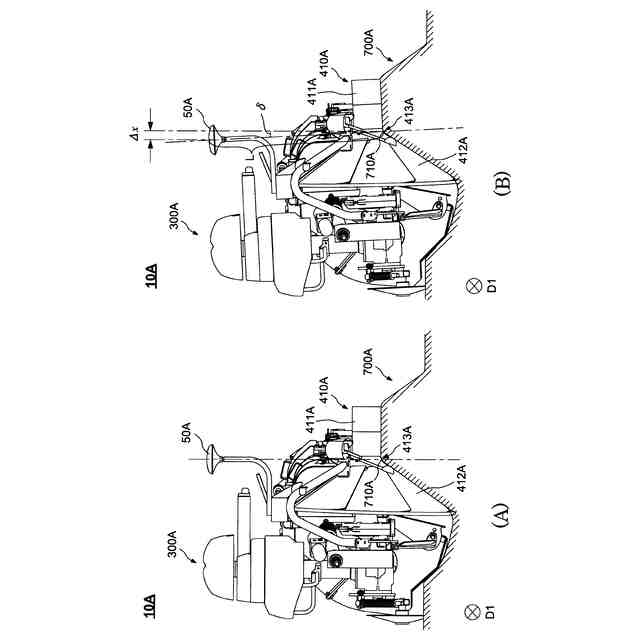
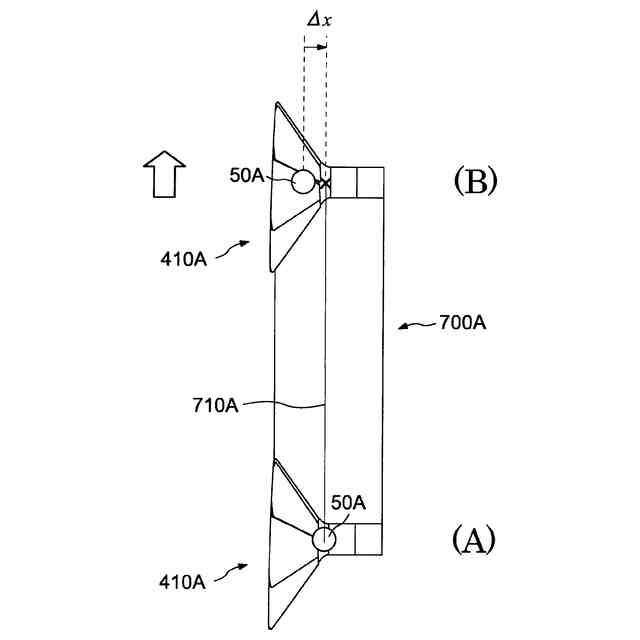
しかしながら、特許文献1の農作業機では、位置検出器の位置と畦塗り機に設けられた畦形成部(例えば、畦塗ドラム)の位置とが一致していないため、畦が形成された位置の精度が十分ではなかった。また、トラクタが真っ直ぐ走行できないような軟弱圃場などにおいては、トラクタが進行方向に対して傾いてしまうことが想定されるが、走行機体に位置検出器が設けられていると、この傾きを位置検出器で検出することができない。この結果、トラクタの傾きに起因した畦塗機の位置変化を検出できず、畦の形成精度が悪化するという問題が生じる。さらに、畦形成部が走行機体の進行方向に対して走行機体の側方にオフセットした位置に移動可能な構成の場合、オフセット量に応じて、上記位置検出器によって取得された位置情報と畦形成部によって形成された畦の位置との位置関係が変動するため、畦が形成された位置精度が低下する問題があった。
【0006】
本発明の一実施形態は、形成された畦の形状を高精度でデータ化することを課題の1つとする。
【課題を解決するための手段】
【0007】
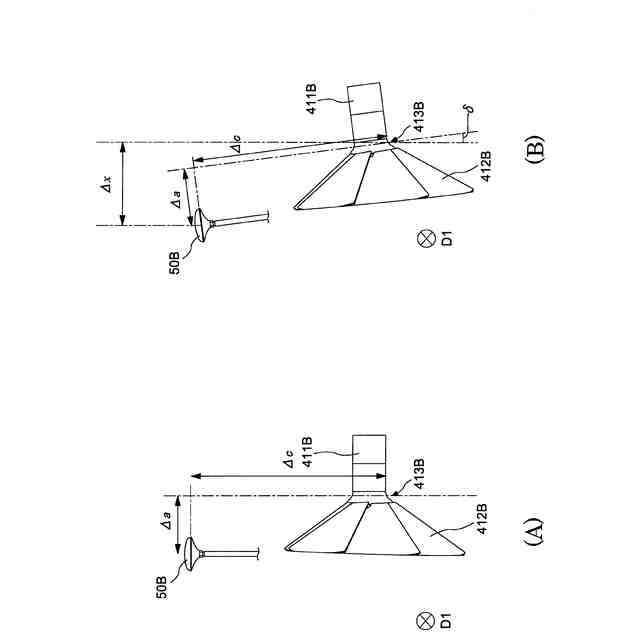
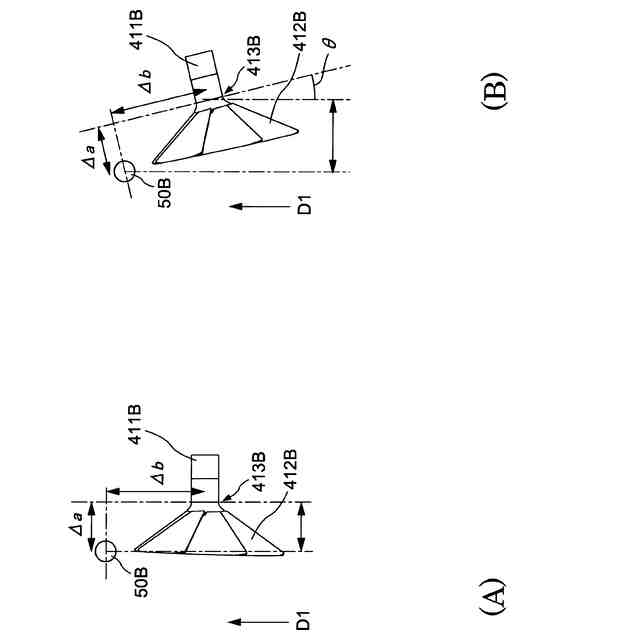
本発明の一実施形態による情報処理装置は、位置検出器によって検出された第1位置情報を受信し、前記第1位置情報と、畦塗り機に備えられた畦形成部の上面形成部と法面形成部との間の境界位置と前記位置検出器との間の相対的な位置関係であって、前記畦塗り機の基準状態における位置関係を示す相対位置情報と、前記畦塗り機の前記基準状態からの傾きを示す傾斜情報と、に基づいて、上面視における畦の上面と法面との境界を示す畦肩位置を特定する。
【0008】
前記傾斜情報は、前記畦塗り機の進行方向を軸とする回動方向における前記畦形成部の傾きを示す第1傾斜情報を含み、前記畦肩位置は、前記進行方向に直交する平面視における前記境界位置と前記位置検出器との距離と、前記第1傾斜情報と、に基づいて特定されてもよい。
【0009】
前記傾斜情報は、鉛直方向を軸とする回動方向における前記畦形成部の傾きを示す第2傾斜情報を含み、前記畦肩位置は、水平な平面視における前記境界位置と前記位置検出器との距離と、前記第2傾斜情報と、に基づいて特定されてもよい。
【0010】
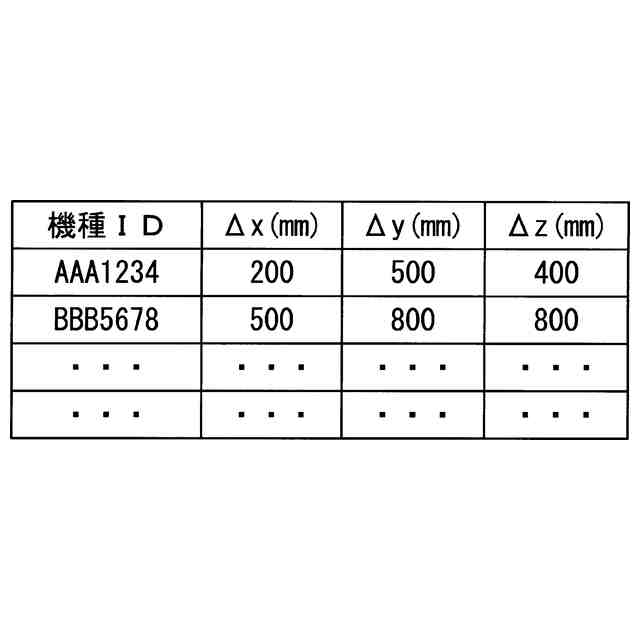
前記畦塗り機を特定する機種情報と、前記畦塗り機における前記相対位置情報と、を関連付けて記憶するテーブルを有し、前記相対位置情報は、入力された前記機種情報又は受信した前記機種情報と、前記テーブルと、に基づいて導出されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
小橋工業株式会社
作業爪及び農作業機
26日前
小橋工業株式会社
作業機
4日前
小橋工業株式会社
草刈り機
4日前
小橋工業株式会社
システム
4日前
小橋工業株式会社
農作業機、情報処理装置及びプログラム
4日前
個人
釣り用ルアー
20日前
個人
播種機
1か月前
個人
釣り用ルアー
20日前
個人
尿処理材
1か月前
個人
獣捕獲罠装置
今日
株式会社シマノ
釣竿
4日前
株式会社アテックス
草刈機
5日前
個人
ペット用オムツカバー
4日前
井関農機株式会社
作業車両
21日前
有限会社マイク
囲い罠
26日前
株式会社シマノ
釣り具
26日前
井関農機株式会社
圃場作業機
22日前
個人
室内栽培システム
29日前
井関農機株式会社
コンバイン
26日前
井関農機株式会社
移植機
1か月前
個人
植物栽培装置
6日前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
圃場管理装置
1か月前
井関農機株式会社
圃場管理装置
1か月前
株式会社西部技研
空調システム
1か月前
井関農機株式会社
歩行型管理機
20日前
株式会社シマノ
釣竿
21日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
株式会社シマノ
釣竿
1か月前
井関農機株式会社
作業車両
1か月前
株式会社ダイイチ
海苔網の酸処理船
29日前
株式会社山田鉄工
海苔網処理船
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ