TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025106146
公報種別
公開特許公報(A)
公開日
2025-07-14
出願番号
2024051019
出願日
2024-03-27
発明の名称
ロボットアームの腕部装置
出願人
東佑達自動化科技股ふん有限公司
代理人
個人
,
個人
主分類
B25J
17/00 20060101AFI20250707BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】小型化が容易で且つ制御精度を高められるロボットアームの腕部装置の提供。
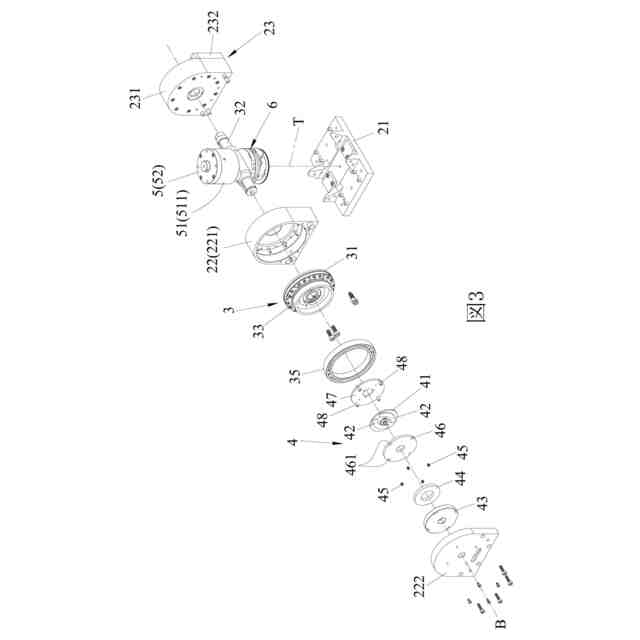
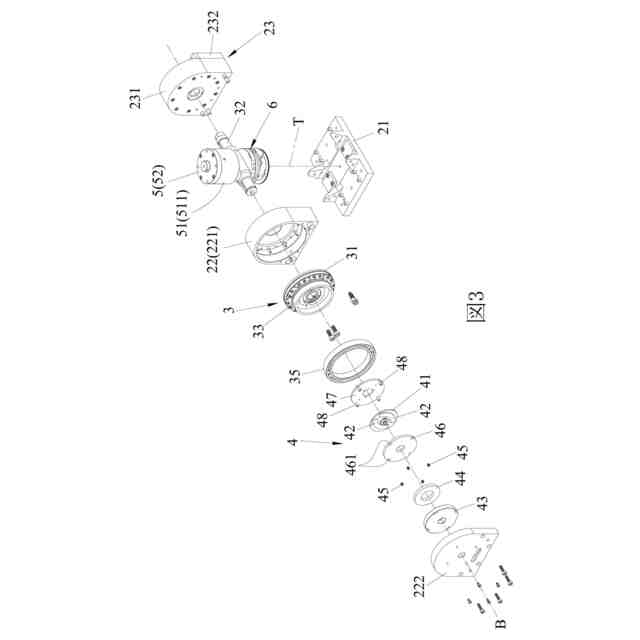
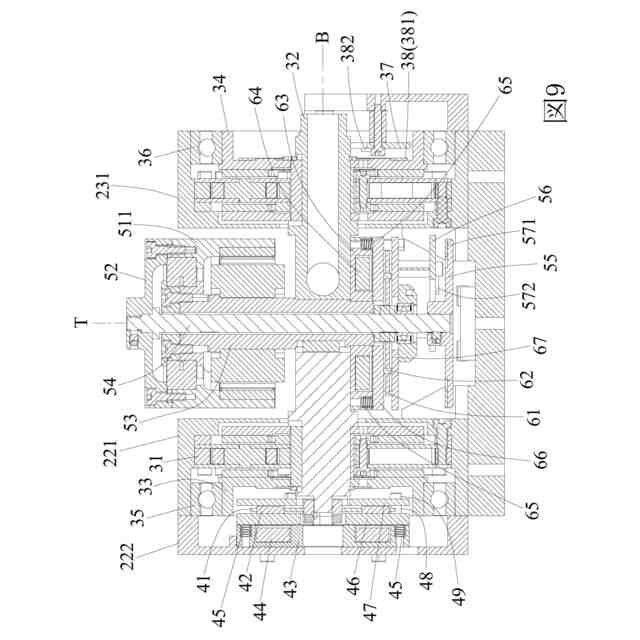
【解決手段】筐体手段と、筐体手段内に配置される第1のモータ31と、第1の軸線Bに沿って延伸し、且つ、第1のモータ31の駆動により第1の軸線Bを回転軸として回転するように第1のモータ31に接続される第1の出力軸32と、第1の出力軸32の回転角度を測定して第1のモータ31をフィードバック制御する第1のエンコーダを有する第1の回転手段3と、第1の出力軸32に接続される第1のブレーキシート42と、第1の軸線Bに沿って移動するように駆動されることによって、第1のブレーキシート42に当接して第1の出力軸32の回転を阻止し、第1のブレーキシート42から離れて第1の出力軸32の回転を許容する第1のブレーキ板46と、を有する第1のブレーキ手段4と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
ロボットアームに用いられる、筐体手段と第1の回転手段と第2の回転手段と第1のブレーキ手段とを備えたロボットアームの腕部装置であって、
前記第1の回転手段は、前記筐体手段内に配置される第1のモータと、第1の軸線に沿って延伸し、且つ、前記第1のモータの駆動により前記第1の軸線を回転軸として回転するように前記第1のモータに接続される第1の出力軸と、前記第1の出力軸の回転角度を測定して前記第1のモータをフィードバック制御する第1のエンコーダを有し、
前記第2の回転手段は前記第1の出力軸と共に前記第1の軸線を回転軸として回転するように前記第1の出力軸に配置されており、且つ、第2のモータと、前記第2のモータにより駆動されて前記第1の軸線に直交する第2の軸線を回転軸として回転する作業台と、を有するように構成されており、
前記第1のブレーキ手段は、前記第1の出力軸に接続される第1のブレーキシートと、前記第1の軸線に沿って移動するように駆動されることによって、前記第1のブレーキシートに当接することで、前記第1の出力軸の回転を阻止し、そして前記第1のブレーキシートから離れることで、前記第1の出力軸の回転を許容する第1のブレーキ板と、を有する、ロボットアームの腕部装置。
続きを表示(約 2,100 文字)
【請求項2】
前記第1のブレーキ手段は、前記第1のブレーキ板の前記第1のブレーキシートに反対する側にある第1のコイルと、前記第1のブレーキ板を前記第1のブレーキシート側に押し付ける力を常に前記第1のブレーキ板に与える複数の第1の弾性部材と、を更に有し、
前記第1のコイルは、電気が供給されると、各前記第1の弾性部材が前記第1のブレーキ板に与える力に対抗して前記第1のブレーキ板を前記第1のブレーキシートから離れさせる磁力を生成するように配置構成されている、請求項1に記載のロボットアームの腕部装置。
【請求項3】
前記第1のブレーキ手段は、前記筐体手段に固定される第1の取付台と、前記第1の軸線に沿って前記第1の取付台と間隔を空けた位置に配置される第1の固定プレートと、前記第1の軸線に平行するように延伸して前記第1の取付台と前記第1の固定プレートとの間に介在する複数の第1の案内柱と、を有し、
前記第1のコイル及び各前記第1の弾性部材は前記第1の取付台に収容され、
前記第1のブレーキシートは前記第1の固定プレートと前記第1のブレーキ板との間に介在し、且つ、前記第1のブレーキシートと前記第1の固定プレートとの間には間隔が空けられ、前記第1のブレーキ板には各前記第1の案内柱を通すための第1の係合用切り込みが複数形成されている、請求項2に記載のロボットアームの腕部装置。
【請求項4】
前記第1のエンコーダは、前記第1の出力軸と共に回転するように配置される第1の回転ディスクと、前記第1の回転ディスクの回転状態を検知するように前記筐体手段に配置される第1のリーダヘッドと、を有する、請求項1に記載のロボットアームの腕部装置。
【請求項5】
前記筐体手段は、台座と、互いに間を開けて前記台座に配置される第1のサイド保持台と第2のサイド保持台と、を有し、
前記第1のモータは前記第1のサイド保持台に配置され、
前記第1の出力軸は前記第1の軸線に沿って前記第1のサイド保持台及び前記第2のサイド保持台を貫通し、前記第1のエンコーダは前記第1の出力軸に接続すると共に、前記第2のサイド保持台内に配置される、請求項1に記載のロボットアームの腕部装置。
【請求項6】
前記第2の回転手段は、前記第2のモータに接続すると共に、前記第2の軸線に沿って延伸して前記第1の出力軸に配置される中空スリーブと、前記作業台に接続すると共に、回転可能に前記中空スリーブを挿通する第2の出力軸と、
前記第2の出力軸の回転角度を測定して前記第2のモータをフィードバック制御する第2のエンコーダと、を更に有するように構成されており、
また、前記ロボットアームの腕部装置は、前記中空スリーブの前記第2のモータに反対する端部に配置される第2のブレーキ手段を更に備え、
前記第2のブレーキ手段は、前記第2の出力軸に接続される第2のブレーキシートと、
前記第2の軸線に沿って移動するように駆動されることによって、前記第2のブレーキシートに当接することで、前記第2の出力軸の回転を阻止し、そして前記第2のブレーキシートから離れることで、前記第2の出力軸の回転を許容する第2のブレーキ板と、を有する、請求項1に記載のロボットアームの腕部装置。
【請求項7】
前記第2のブレーキ手段は、前記中空スリーブに接続される第2のコイルと、
前記第2のブレーキ板を前記第2のブレーキシート側に押し付ける力を常に前記第2のブレーキ板に与える複数の第2の弾性部材と、を更に有し、
前記第2のコイルは、電気が供給されると、各前記第2の弾性部材が前記第2のブレーキ板に与える力に対抗して前記第2のブレーキ板を前記第2のブレーキシートから離れさせる磁力を生成するように配置構成されている、請求項6に記載のロボットアームの腕部装置。
【請求項8】
前記第2のブレーキ手段は、前記中空スリーブに固定される第2の取付台と、前記第2の軸線に沿って前記第2の取付台と間隔を空けた位置に配置される第2の固定プレートと、
前記第2の軸線に平行するように延伸して前記第2の取付台と前記第2の固定プレートとの間に介在する複数の第2の案内柱と、を有し、
前記第2のコイル及び各前記第2の弾性部材は前記第2の取付台に収容され、
前記第2のブレーキシートは前記第2の固定プレートと前記第2のブレーキ板との間に介在し、且つ、
前記第2のブレーキシートと前記第2の固定プレートとの間には間隔が空けられ、前記第2のブレーキ板には各前記第2の案内柱を通すための第2の係合用切り込みが複数形成されている、請求項7に記載のロボットアームの腕部装置。
【請求項9】
前記第2のエンコーダは、前記第2の出力軸の前記作業台に反対する端部に配置される第2の回転ディスク,と、前記第2の回転ディスクの回転状態を検知するように前記第2の固定プレートに配置される第2のリーダヘッドと、を有する、請求項8に記載のロボットアームの腕部装置。
発明の詳細な説明
【技術分野】
【0001】
本発明はロボットアームに用いられる腕部装置に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
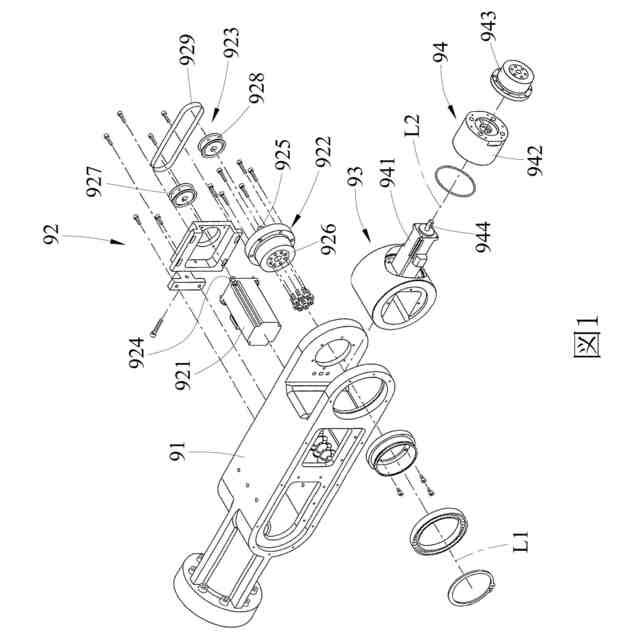
図1に特許文献1に記載されるロボットアームの腕部関節装置が示されており、図示のように、この腕部関節装置は前部アーム91と、第1の回転アセンブリ92と、腕部材93と、第2の回転アセンブリ94とを備える。第1の回転アセンブリ92は前部アーム91内に配置され、且つ、第1のモータ921と、第1の減速機922と、伝動手段923とを有する。第1のモータ921は出力軸924を有する。第1の減速機922は入力軸925と出力軸926とを有する。伝動手段923は、第1のモータ921が有する出力軸924に取り付けられる第1のプーリー927と、第1の減速機922の入力軸925に取り付けられる第2のプーリー928と、これらに取り付けられるベルト929とを有し、第1のモータ921からの駆動力は伝動手段923によって第1の減速機922に伝動される。腕部材93は前部アーム91に取り付けられると共に、第1の減速機922の出力軸926に接続されるので、出力軸926からの駆動力で第1の出力軸線L1を中心として回転する。第2の回転アセンブリ94は第2のモータ941と接続台942と第2の減速機943とを有する。第2のモータ941は腕部材93内に配置されると共に出力軸944を有する。接続台942は第2のモータ941と第2の減速機943とを接続する。第2のモータ941からの回転駆動力が第2の減速機943に伝動されることにより、第2の減速機943の出力軸に取り付けられるワーク(図示せず)は第2の出力軸線L2を中心として回転する。
【0003】
この従来のロボットアームの腕部関節装置における動力の伝達は第1の減速機922と第2の減速機943とにより実現され、そして第1の減速機922と第2の減速機943とはいずれもベルトに連動されるプーリーを用いる構成になっているので、ベルトの経年劣化によって伝動を精密に制御することが難しくなり、そしてプーリーを配置するスペースが必要になるので、小型化することも難しい。
【先行技術文献】
【特許文献】
【0004】
台湾特許第I418452B号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術に鑑みて、本発明は小型化が容易で且つ制御精度を高められるロボットアームの腕部装置の提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成すべく、本発明は、ロボットアームに用いられる、筐体手段(2)と第1の回転手段(3)と第2の回転手段(5)と第1のブレーキ手段(4)とを備えたロボットアームの腕部装置(1)であって、
前記第1の回転手段(3)は、前記筐体手段(2)内に配置される第1のモータ(31)と、第1の軸線(B)に沿って延伸し、且つ、前記第1のモータ(31)の駆動により前記第1の軸線(B)を回転軸として回転するように前記第1のモータ(31)に接続される第1の出力軸(32)と、前記第1の出力軸(32)の回転角度を測定して前記第1のモータ(31)をフィードバック制御する第1のエンコーダ(38)を有し、
前記第2の回転手段(5)は前記第1の出力軸(32)と共に前記第1の軸線(B)を回転軸として回転するように前記第1の出力軸(32)に配置されており、且つ、第2のモータ(51)と、前記第2のモータ(51)により駆動されて前記第1の軸線(B)に直交する第2の軸線(T)を回転軸として回転する作業台(52)と、を有するように構成されており、
前記第1のブレーキ手段(4)は、前記第1の出力軸(32)に接続される第1のブレーキシート(42)と、前記第1の軸線(B)に沿って移動するように駆動されることによって、前記第1のブレーキシート(42)に当接することで、前記第1の出力軸(32)の回転を阻止し、そして前記第1のブレーキシート(42)から離れることで、前記第1の出力軸(32)の回転を許容する第1のブレーキ板(46)と、を有する、ロボットアームの腕部装置(1)を提供する。
【発明の効果】
【0007】
本発明のロボットアームの腕部装置は、第1のエンコーダで第1の出力軸の回転角度を測定して第1のモータをフィードバック制御することにより、また第1のブレーキシートと第1のブレーキ板とを用いる第1のブレーキ手段を採用することで、第1の出力軸の回転をより正確かつ確実に停止させることができる。さらに、本発明のロボットアームの腕部装置はベルトとプーリーと減速機を用いる構成の代わりに、モータとエンコーダとブレーキ手段による駆動システムを実現するので、各部材をより集中的に配置することができるようになり、したがって装置全体の小型化にも寄与するため、本発明の目的を確実に達成することができる。
【図面の簡単な説明】
【0008】
従来のロボットアームの腕部関節装置の一例が示される分解斜視図である。
本発明のロボットアームの腕部装置の実施例の構成が示される斜視図である。
同実施例の第1の回転手段と第1のブレーキ手段とが示される一部分解斜視図である。
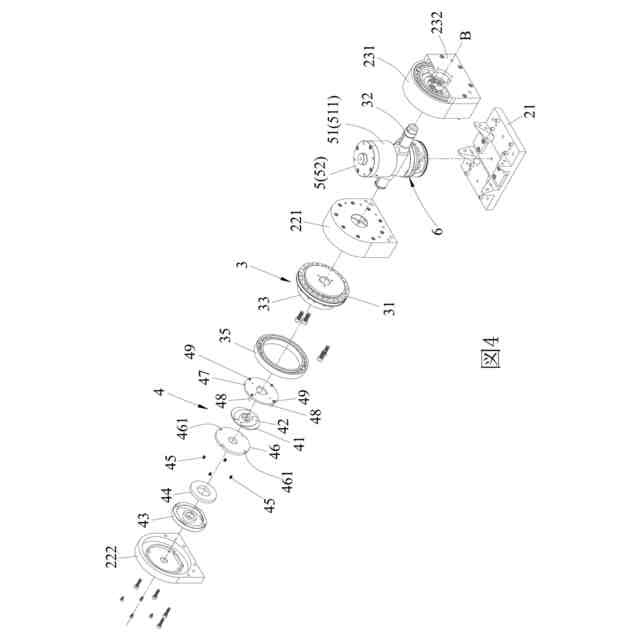
図3に類似する一部分解斜視図である。
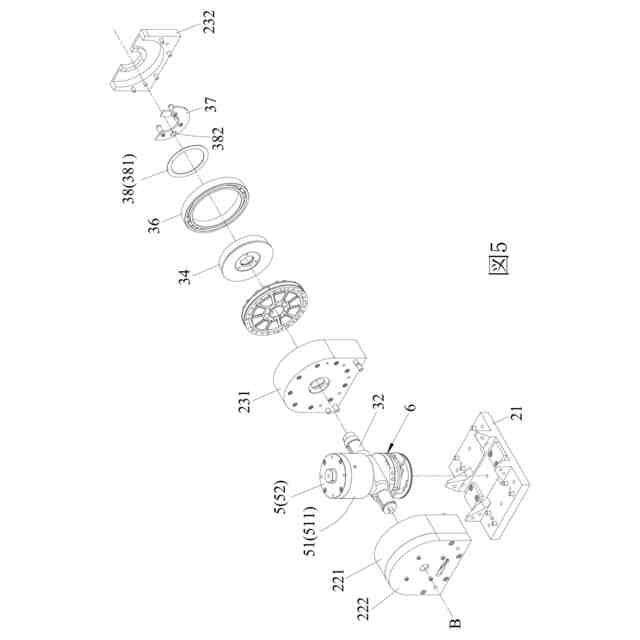
同実施例における第1の回転手段及び第1のブレーキ手段のもう1つの一部分解斜視図である。
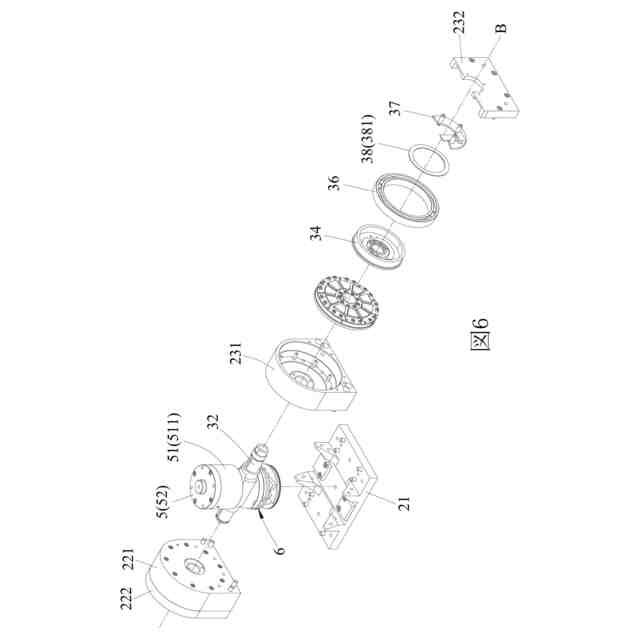
図5に類似する一部分解斜視図である。
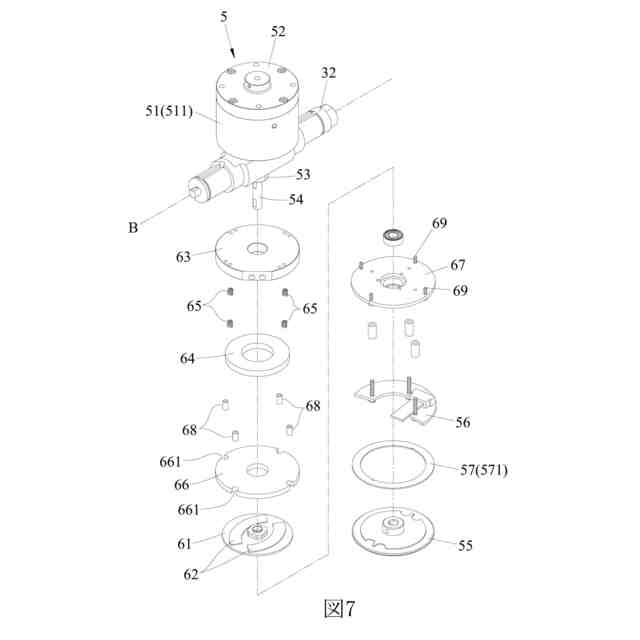
同実施例における第2の回転手段及び第2のブレーキ手段の一部分解斜視図である。
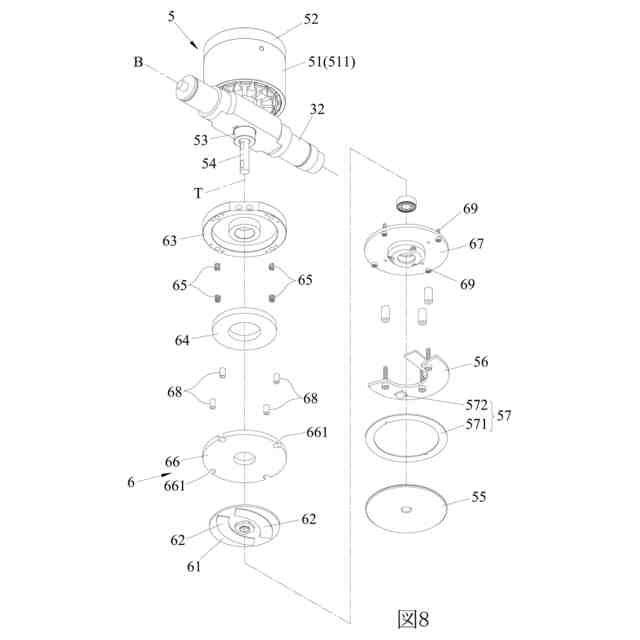
図7に類似する一部分解斜視図である。
同実施例の断面図である。
同実施例における第1のブレーキ手段が示される一部拡大断面図である。
図10に類似する一部拡大断面図である。
同実施例における第2のブレーキ手段が示される一部拡大断面図である。
図12に類似する一部拡大断面図である。
【発明を実施するための形態】
【0009】
本発明の実施形態の目的、技術手段、及び利点をより明確に説明するために、以下、本発明の実施形態の添付図面を組み合わせて、本発明の実施形態における技術手段に対して明確且つ完全に説明する。説明する実施形態は、本発明の一部の実施形態であり、すべての実施形態ではないことが明らかであろう。通常、添付図面に描きまた示す本発明の実施形態の部品は各種異なる配置で布置及び設計することができる。従って、以下、添付図面中に提供した本発明の実施形態の詳細説明は、本発明の保護範囲に対していかなる制限も構成せず、単に本発明の選択された実施形態を示すのみである。
【0010】
本発明をより詳細に説明する前に、適切と考えられる場合には、参照符号または参照符号の末端部分が、対応するまたは類似する要素を示すために図間で繰り返されており、これらは任意に同様の特性を有することができることに留意されたい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
28日前
トヨタ自動車株式会社
関節機構
2か月前
株式会社ダイヘン
移動体
2か月前
株式会社ダイヘン
搬送装置
1か月前
住友重機械工業株式会社
教示装置
25日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
東京都公立大学法人
対象物把持装置
2か月前
川崎重工業株式会社
ロボット
26日前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
2か月前
学校法人五島育英会
アーム機構
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
25日前
工機ホールディングス株式会社
作業機
25日前
工機ホールディングス株式会社
作業機
1か月前
株式会社PILLAR
チューブ保持治具
2か月前
庄内機械株式会社
釘打装置
2か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社マキタ
電気機器
26日前
ホシデン株式会社
分解用治具
1か月前
株式会社スター精機
産業用ロボット
2か月前
オークラ輸送機株式会社
ハンド装置
2か月前
アピュアン株式会社
衝撃工具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
28日前
工機ホールディングス株式会社
作業機
28日前
株式会社リコー
多関節ロボット
2か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社マキタ
電動作業機
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































