TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025105991
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2025077702,2024067627
出願日
2025-05-08,2020-01-31
発明の名称
情報処理装置および情報処理方法
出願人
パナソニックオートモーティブシステムズ株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G01C
21/30 20060101AFI20250703BHJP(測定;試験)
要約
【課題】教師走行を行った場所で自動走行できない可能性が高いことを、自動走行を行うことなくユーザが確認することができる。
【解決手段】本開示の情報処理装置は、教師走行の際に、移動体の周辺を撮影した情報である画像情報を受け取り、受け取った画像情報から得られる自己位置推定に用いる情報を抽出する抽出部と、抽出部により抽出された自己位置推定に用いる情報の量が第1の量である場合に、自己位置推定に用いる情報の量が第1の量よりも多い第2の量である場合と異なる指示情報を出力部に出力する出力制御部と、を備え、教師走行の開始位置は自動走行の開始位置であり、教師走行の終了位置は駐車目標位置であり、出力制御部は、自己位置推定に用いる情報の量が第2の量である場合、ユーザに教師走行の正常終了を報知し、指示情報は、走行経路データに基づく自動走行を行うよりも前に出力される。
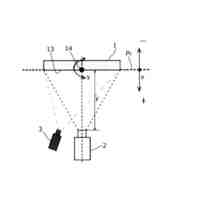
【選択図】図2
特許請求の範囲
【請求項1】
ユーザが手動で車両を教師走行した際の走行経路を示す走行経路データに基づき、自動走行を行う情報処理装置において、
前記教師走行の際に、移動体の周辺を撮影した情報である画像情報を受け取り、受け取った前記画像情報から得られる自己位置推定に用いる情報を抽出する抽出部と、
前記抽出部により抽出された前記自己位置推定に用いる情報の量が第1の量である場合に、前記自己位置推定に用いる情報の量が前記第1の量よりも多い第2の量である場合と異なる指示情報を出力部に出力する出力制御部と、
を備え、
前記教師走行の開始位置は前記自動走行の開始位置であり、
前記教師走行の終了位置は駐車目標位置であり、
前記出力制御部は、前記自己位置推定に用いる情報の量が前記第2の量である場合、前記ユーザに教師走行の正常終了を報知し、
前記指示情報は、前記走行経路データに基づく前記自動走行を行うよりも前に出力される、
情報処理装置。
続きを表示(約 1,000 文字)
【請求項2】
前記第1の量は、前記自己位置推定に用いる情報の量が所定値に対して不足している量である、
請求項1に記載の情報処理装置。
【請求項3】
前記第2の量は、前記自己位置推定に用いる情報の量が所定値に対して充足している量である、
請求項1に記載の情報処理装置。
【請求項4】
前記指示情報は、前記自己位置推定に用いる情報の量が前記所定値に対して不足している場合に、前記自己位置推定に用いる情報の量が前記所定値に対して不足していることを示す情報である、
請求項2に記載の情報処理装置。
【請求項5】
前記指示情報は、前記自己位置推定に用いる情報の量が前記所定値に対して充足している場合に、前記自己位置推定に用いる情報の量が前記所定値に対して充足していることを示す情報である、
請求項3に記載の情報処理装置。
【請求項6】
前記出力制御部は、
前記自己位置推定に用いる情報の量が前記所定値に対して不足している場合、前記自己位置推定に用いる情報の量が前記所定値に対して充足している場合と異なる情報を示す指示音声を、前記指示情報として出力する、
請求項2に記載の情報処理装置。
【請求項7】
前記出力制御部は、
前記自己位置推定に用いる情報の量が前記所定値に対して充足している場合、前記自己位置推定に用いる情報の量が前記所定値に対して充足していることを示す指示音声を、前記指示情報として出力する、
請求項3に記載の情報処理装置。
【請求項8】
前記出力制御部は、
前記自己位置推定に用いる情報の量が前記所定値に対して不足している場合、前記自己位置推定に用いる情報の量が前記所定値に対して充足している場合と異なる情報を示す指示画像を、前記指示情報として出力する、
請求項2に記載の情報処理装置。
【請求項9】
前記出力制御部は、
前記自己位置推定に用いる情報の量が前記所定値に対して充足している場合、前記自己位置推定に用いる情報の量が前記所定値に対して充足していることを示す指示画像を、前記指示情報として出力する、
請求項3に記載の情報処理装置。
【請求項10】
前記自己位置推定に用いる情報の量は、特徴点の数で表される、
請求項1乃至請求項9の何れか1項に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理装置および情報処理方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、車両が走行する周囲に存在する物体の特徴に基づき地図データを作成する技術が開示されている。そして、作成された地図データと、車両に搭載された撮影装置により取得された画像とを比較することにより、当該車両が地図データのうちのどこに位置するかを推定する処理である自己位置推定を実行し、走行する経路に沿って自動走行を行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-133318号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、一般に、このような技術では、自動走行を行う場所で予めユーザが手動で車両を走行(以下、教師走行と称する。)し、当該の場所で自動走行を行うために必要となる自己位置推定に用いる地図データおよび走行経路を示す走行経路データを作成し、それ以降は作成された地図データおよび走行経路データを用いることで、自動走行を実現する。
【0005】
自動走行の際に、自己位置推定に用いられる地図データは、実景中に存在する物体の特徴点の三次元位置を記憶したデータである。自動走行時に、車両により撮影された画像から特徴点を抽出し、その特徴点が地図データに含まれる何れの特徴点であるかを照合する。このとき、地図データと一致する特徴点の数が所定数以上であれば、車両の自己位置を推定できたと判定する。
【0006】
しかし、凹凸、色の変化、の何れもない物体に囲まれた場所等、車両周囲の環境の特徴が十分でない場所で、その周囲の地図データを作成するために車両を走行させる教師走行を行った場合、作成された地図データに含まれる特徴点の数が自己位置推定するために必要な所定数に対して不足するため、自己位置推定ができない可能性が高い。しかしながら、従来技術では、実際に自動走行を行うまで、教師走行を行った場所で自動走行できない可能性が高いことをユーザが確認することができなかった。
【0007】
本開示が解決しようとする課題は、教師走行を行った場所で自動走行できない可能性が高いことを、自動走行を行うことなくユーザが確認することができる、情報処理装置および情報処理方法を提供することである。
【課題を解決するための手段】
【0008】
本開示の情報処理装置は、ユーザが手動で車両を教師走行した際の走行経路を示す走行経路データに基づき、自動走行を行う情報処理装置において、前記教師走行の際に、移動体の周辺を撮影した情報である画像情報を受け取り、受け取った前記画像情報から得られる自己位置推定に用いる情報を抽出する抽出部と、前記抽出部により抽出された前記自己位置推定に用いる情報の量が第1の量である場合に、前記自己位置推定に用いる情報の量が前記第1の量よりも多い第2の量である場合と異なる指示情報を出力部に出力する出力制御部と、を備え、前記教師走行の開始位置は前記自動走行の開始位置であり、前記教師走行の終了位置は駐車目標位置であり、前記出力制御部は、前記自己位置推定に用いる情報の量が前記第2の量である場合、前記ユーザに教師走行の正常終了を報知し、前記指示情報は、前記走行経路データに基づく前記自動走行を行うよりも前に出力される。
【発明の効果】
【0009】
本開示に係る情報処理装置および情報処理方法によれば、教師走行した場所で自動走行できない可能性が高いことを、自動走行を行うことなくユーザが確認することができる。
【図面の簡単な説明】
【0010】
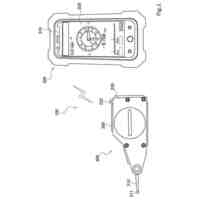
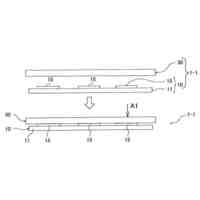
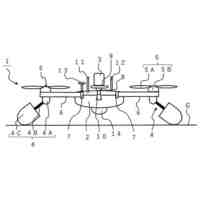
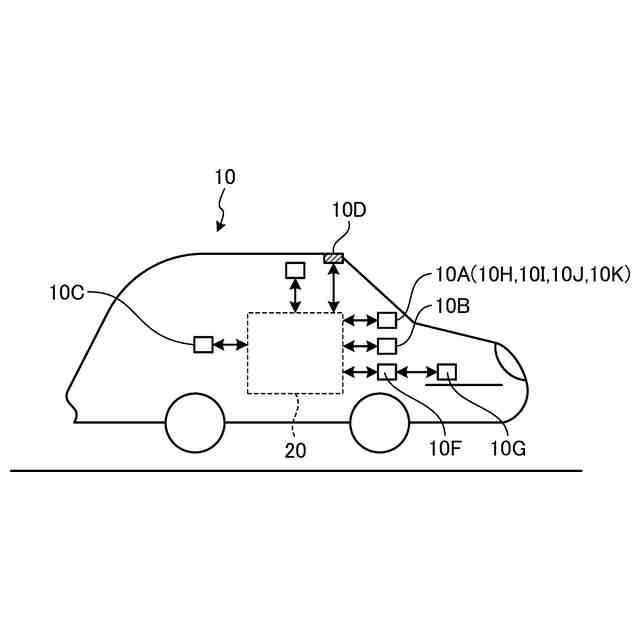
図1は、実施形態1に係る、移動体の一例を示す図である。
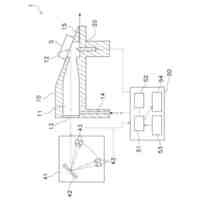
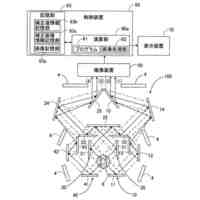
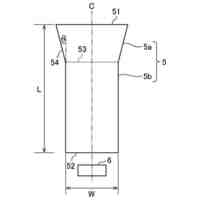
図2は、実施形態1に係る、撮影装置の設置位置の一例を示す模式図である。
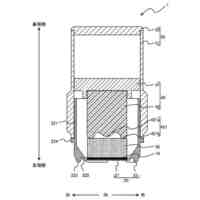
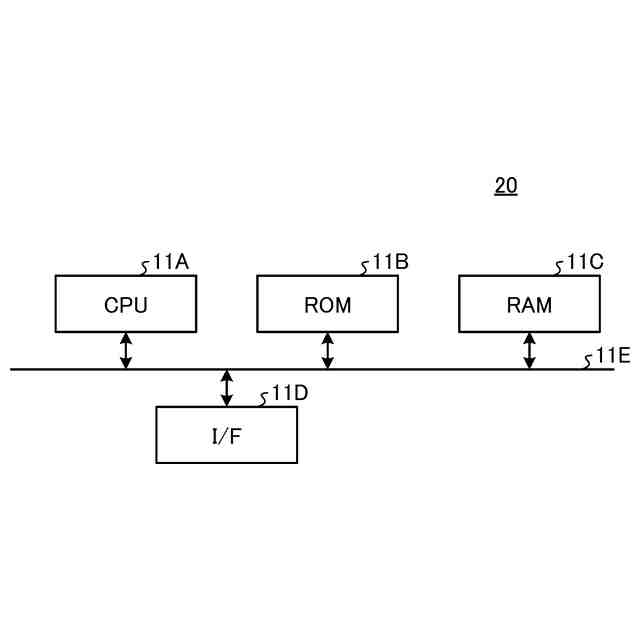
図3は、実施形態1に係る、情報処理装置のハードウェア構成図の一例を示す図である。
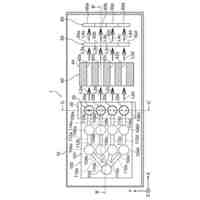
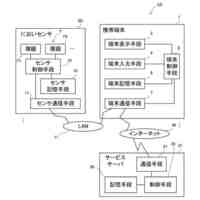
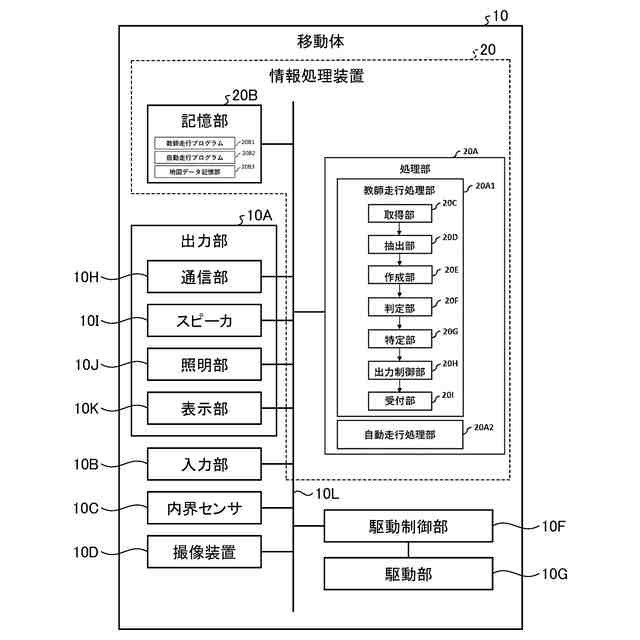
図4は、実施形態1に係る、移動体の機能的構成の一例を示すブロック図である。
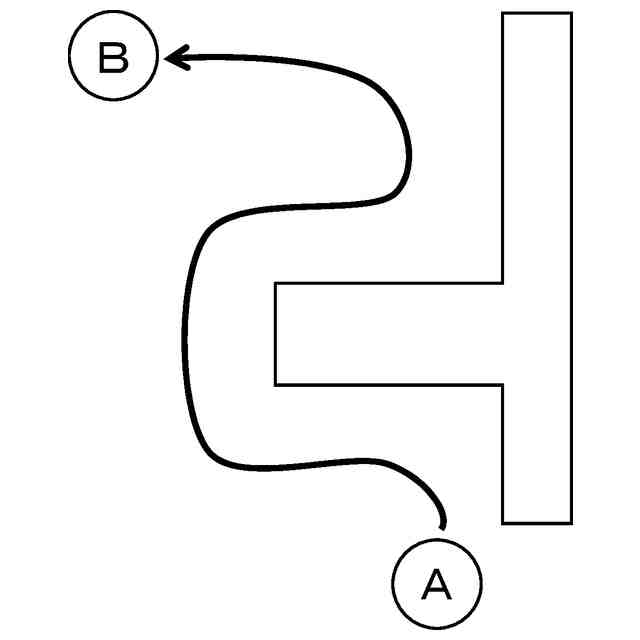
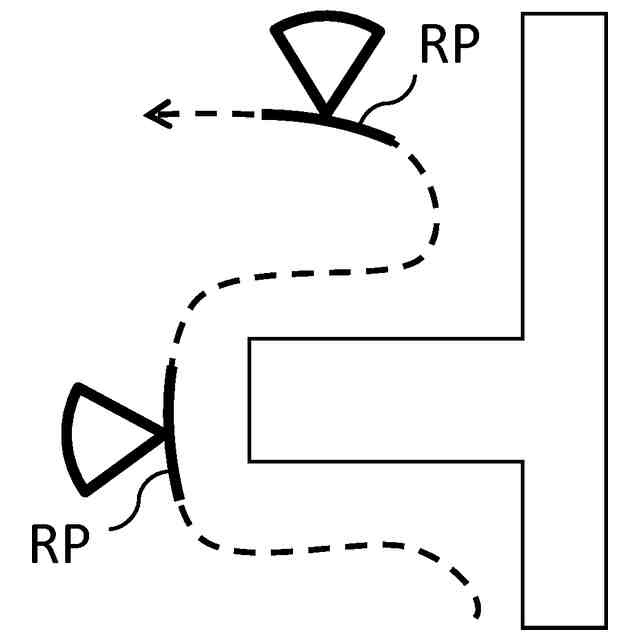
図5は、実施形態1に係る、移動体の適用場面の一例を示す模式図である。
図6は、実施形態1に係る、指示画像の一例を示す模式図である。
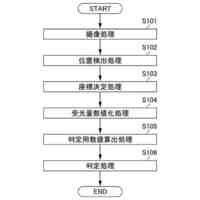
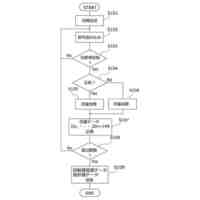
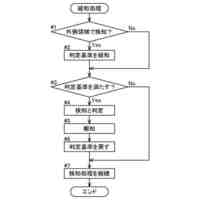
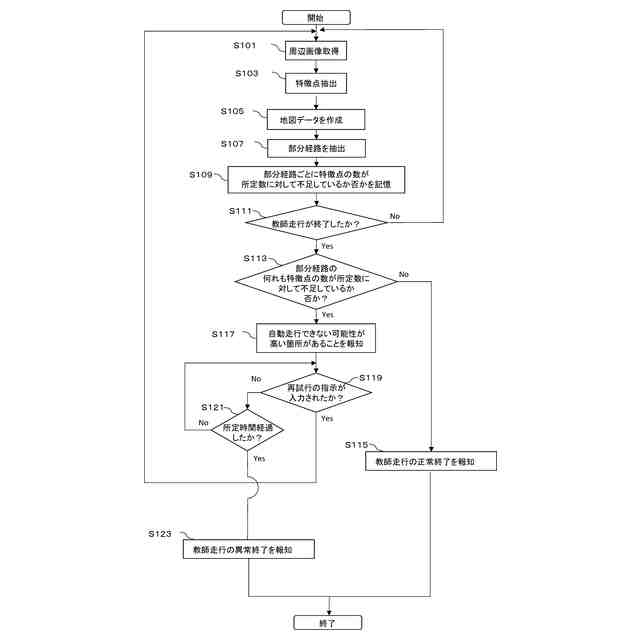
図7は、実施形態1に係る、教師走行の情報処理の手順の一例を示すフローチャートである。
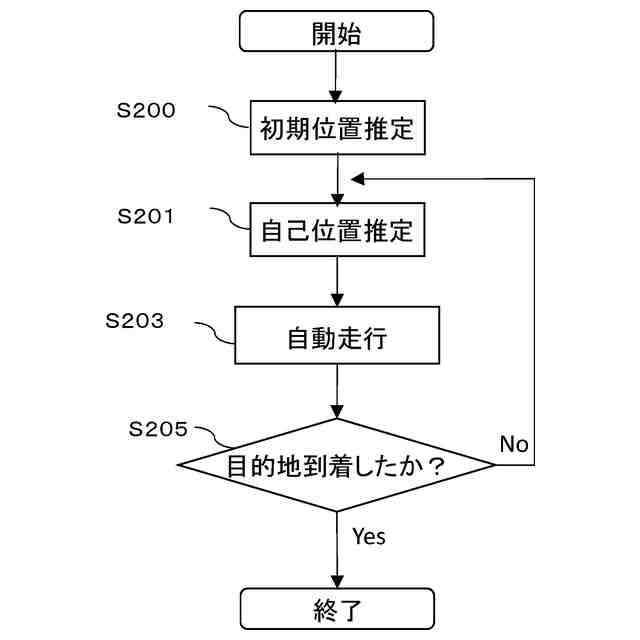
図8は、実施形態1に係る、自動走行の情報処理の手順の一例を示すフローチャートである。
図9は、変形例2に係る、教師走行の情報処理の手順の一例を示すフローチャートである。
図10は、変形例2に係る、自動走行の情報処理の手順の一例を示すフローチャートである。
図11は、実施形態2に係る、移動体の機能的構成の一例を示すブロック図である。
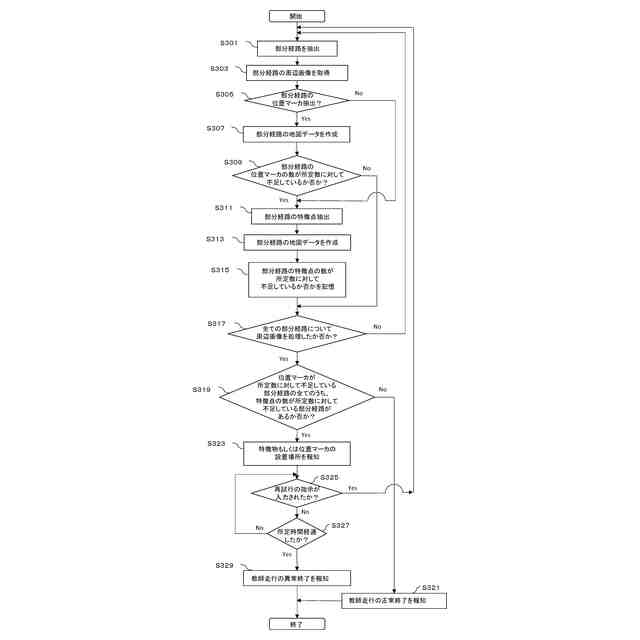
図12は、実施形態2に係る、教師走行の情報処理の手順の一例を示すフローチャートである。
図13は、実施形態2に係る、自動走行の情報処理の手順の一例を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本精機株式会社
計器装置
18日前
株式会社東光高岳
計器
14日前
株式会社ミツトヨ
測定器
11日前
大同特殊鋼株式会社
疵検出方法
11日前
日本特殊陶業株式会社
ガスセンサ
12日前
エグゼヴィータ株式会社
端末装置
12日前
日本特殊陶業株式会社
ガスセンサ
12日前
タカノ株式会社
試料分析装置
11日前
バイオテック株式会社
容器設置装置
12日前
富士電機株式会社
エンコーダ
13日前
富士電機株式会社
エンコーダ
13日前
柳井電機工業株式会社
部材検査装置
12日前
タカノ株式会社
試料分析装置
11日前
JNC株式会社
トランジスタ型センサ
11日前
JNC株式会社
トランジスタ型センサ
11日前
株式会社ノーリツ
通信システム
18日前
新電元メカトロニクス株式会社
位置検出装置
18日前
日本電気株式会社
測位装置及びその方法
14日前
帝国通信工業株式会社
圧力センサ
12日前
ジャパンプローブ株式会社
超音波探触子
12日前
ウシオ電機株式会社
光学測定装置
11日前
株式会社島津製作所
発光分析装置
18日前
東芝ライテック株式会社
センサ装置
14日前
タカハタプレシジョン株式会社
水道メータ
18日前
株式会社セシアテクノ
気象観測装置
14日前
DIC株式会社
凹凸増幅用具
18日前
テックス理研株式会社
外周検査装置
4日前
中部電力株式会社
におい判定システム
11日前
オプテックス株式会社
検知装置
18日前
株式会社ユピテル
システム及びプログラム等
12日前
オプテックス株式会社
検知装置
18日前
シャープ株式会社
受光装置及び表示装置
12日前
学校法人法政大学
誘電率測定装置
14日前
株式会社ブリヂストン
免震建物の応答解析方法
18日前
デクセリアルズ株式会社
シート状構造物
14日前
株式会社キーエンス
外観検査装置および外観検査方法
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ