TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099746
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216648
出願日
2023-12-22
発明の名称
システムおよび端末
出願人
トヨタ自動車株式会社
代理人
弁理士法人秀和特許事務所
主分類
H04W
4/20 20180101AFI20250626BHJP(電気通信技術)
要約
【課題】UE(User Equipment)から要求があった範囲の領域のセンシング結果を送信する。
【解決手段】システム100は、無線通信ネットワークを構成するシステムであって、所定の位置を起点として指定される第1の範囲におけるセンシングの結果を要求するセンシング要求を受信することと、センシング要求に基づいて、少なくとも第1の範囲を含む領域にセンシングを実行した結果である第1センシング結果を送信することと、を実行する制御部を備える。
【選択図】図1
特許請求の範囲
【請求項1】
無線通信ネットワークを構成するシステムであって、
所定の位置を起点として指定される第1の範囲におけるセンシングの結果を要求するセンシング要求を受信することと、
前記センシング要求に基づいて、少なくとも前記第1の範囲を含む領域にセンシングを実行した結果である第1センシング結果を送信することと、
を実行する制御部を備える、
システム。
続きを表示(約 930 文字)
【請求項2】
前記センシング要求は、
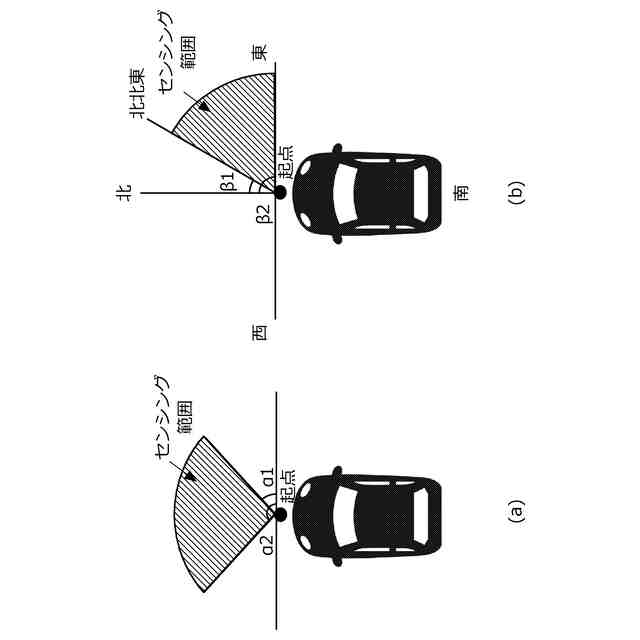
前記第1の範囲を指定するための、前記所定の位置を中心とした中心角に関する情報を含む、
請求項1に記載のシステム。
【請求項3】
前記中心角に関する情報は、
前記所定の位置から見た方位または方位角を示す情報を含む、
請求項2に記載のシステム。
【請求項4】
前記センシング要求は、センシングが実行される時刻または時間長に関する情報を含む、
請求項1に記載のシステム。
【請求項5】
前記制御部は、
前記第1の範囲におけるセンシングを実行することを指示する実行指示を、複数の基地局のうちの少なくとも1つの前記基地局に送信する、
請求項1~4のいずれか1項に記載のシステム。
【請求項6】
前記センシング要求は、
前記所定の位置として、前記センシング要求を送信したUE(User Equipment)の位置を含む、
請求項1~4のいずれか1項に記載のシステム。
【請求項7】
前記センシング要求において、前記第1の範囲は、前記UEがセンシングを実行した第2の範囲に基づいて定められる、
請求項6に記載のシステム。
【請求項8】
コアネットワークに対して、所定の位置を起点として指定される第1の範囲におけるセンシングの結果を要求するセンシング要求を送信することと、
前記コアネットワークから、前記センシング要求に基づいて、少なくとも前記第1の範囲を含む領域にセンシングを実行した結果である第1センシング結果を受信することと、を実行する制御部を備える、
端末。
【請求項9】
前記制御部は、
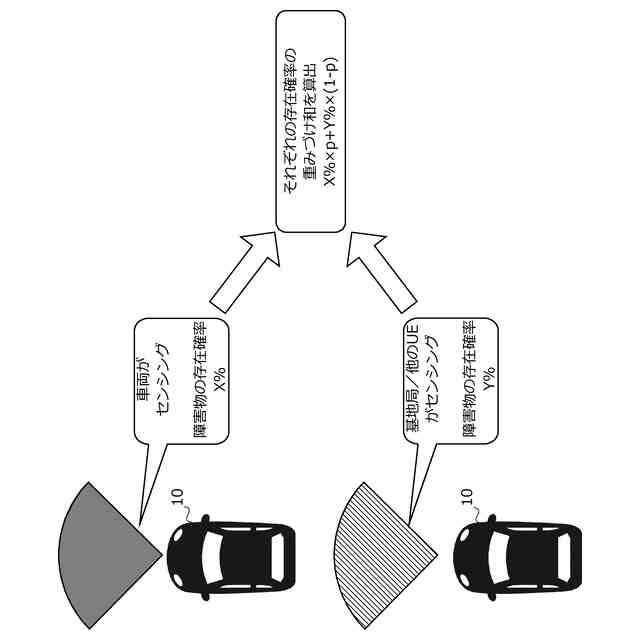
第2の範囲にセンシングを実行した結果である第2センシング結果に基づいて、前記第1センシング結果と、前記第2センシング結果との混合割合を決定し、
前記混合割合に基づいて、前記第1センシング結果と前記第2センシング結果とから、前記第1の範囲におけるセンシング結果を算出する、
請求項8に記載の端末。
発明の詳細な説明
【技術分野】
【0001】
本開示は、セルラー通信ネットワークにおけるシステムおよび端末に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
セルラー通信において基地局(gNB)またはユーザ端末(UE)が無線通信に利用する電波を使って、物体のセンシングを行うことが検討されている。このようなセルラー通信で利用される電波を使ったセンシングによって、障害物の有無等を判定することが想定される。これに関して、センシングによる障害物の有無の判定の技術を利用する発明としては、例えば、特許文献1には、車両の周囲環境を認識し、対象物体の特徴情報を取得し、特徴情報に基づいて対象物体が車両の走行を阻害する可能性を有するか否かを判断し、走行を阻害する可能性がないと判断された場合は車両の通常の走行制御を継続する車両の運転支援装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-107027号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、UE(User Equipment)から要求があった範囲の領域のセンシング結果を送信することを目的とする。
【課題を解決するための手段】
【0005】
本開示の実施形態の一態様は、
無線通信ネットワークを構成するシステムであって、所定の位置を起点として指定される第1の範囲におけるセンシングの結果を要求するセンシング要求を受信することと、前記センシング要求に基づいて、少なくとも前記第1の範囲を含む領域にセンシングを実行した結果である第1センシング結果を送信することと、を実行する制御部を備える、
システムである。
【0006】
また、本開示の実施形態の一態様は、
コアネットワークに対して、所定の位置を起点として指定される第1の範囲におけるセンシングの結果を要求するセンシング要求を送信することと、前記コアネットワークから、前記センシング要求に基づいて、少なくとも前記第1の範囲を含む領域にセンシングを実行した結果である第1センシング結果を受信することと、を実行する制御部を備える、端末である。
【0007】
また、他の態様として、上記の装置が実行する方法、当該方法をコンピュータに実行させるためのプログラム、または、該プログラムを非一時的に記憶したコンピュータ可読記憶媒体が挙げられる。
【発明の効果】
【0008】
本開示によれば、UEから要求があった範囲の領域のセンシング結果を送信することができる。
【図面の簡単な説明】
【0009】
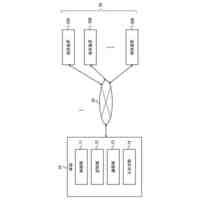
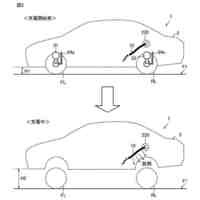
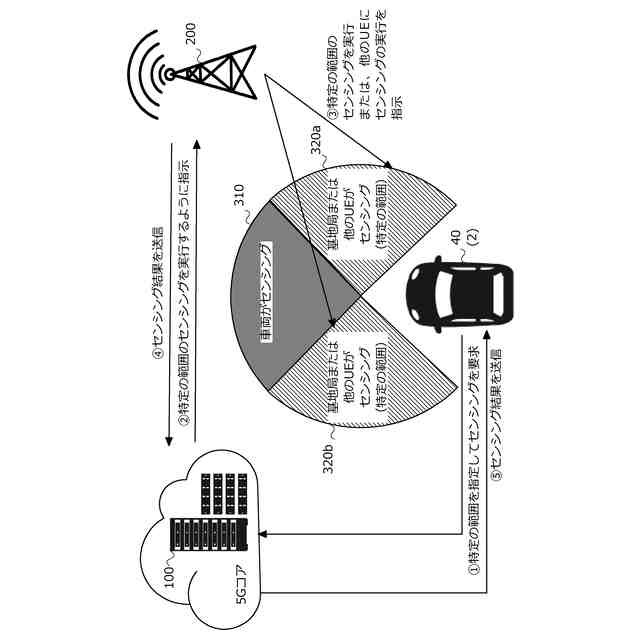
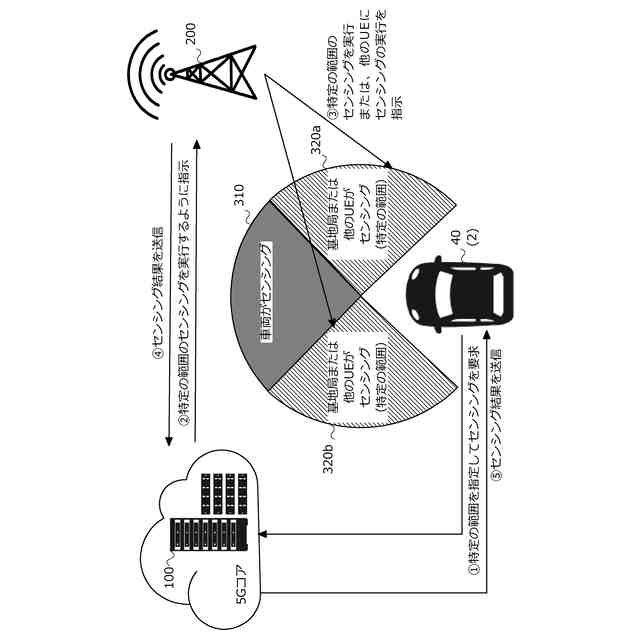
実施形態に係るシステムが実行する処理の概念図。
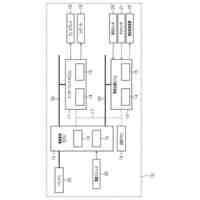
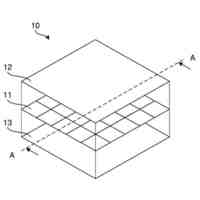
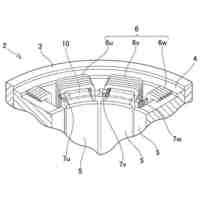
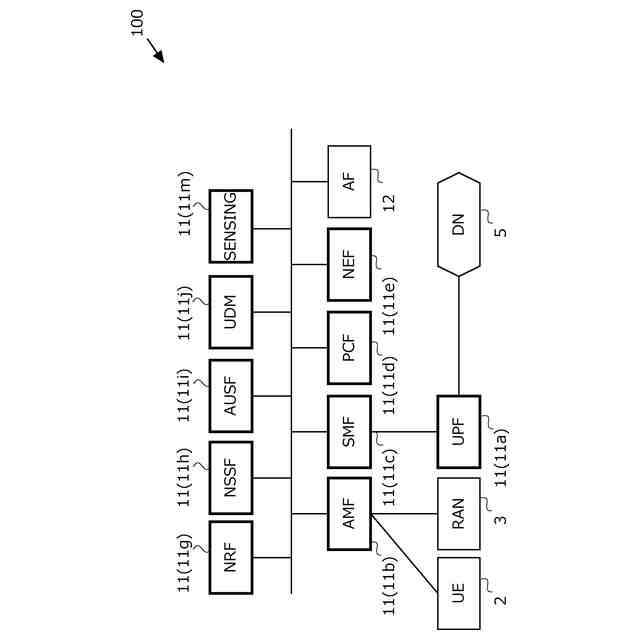
実施形態に係るシステムの構成要素を例示する図。
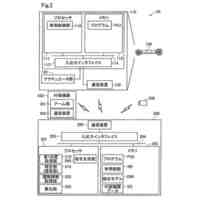
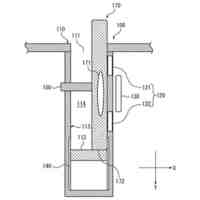
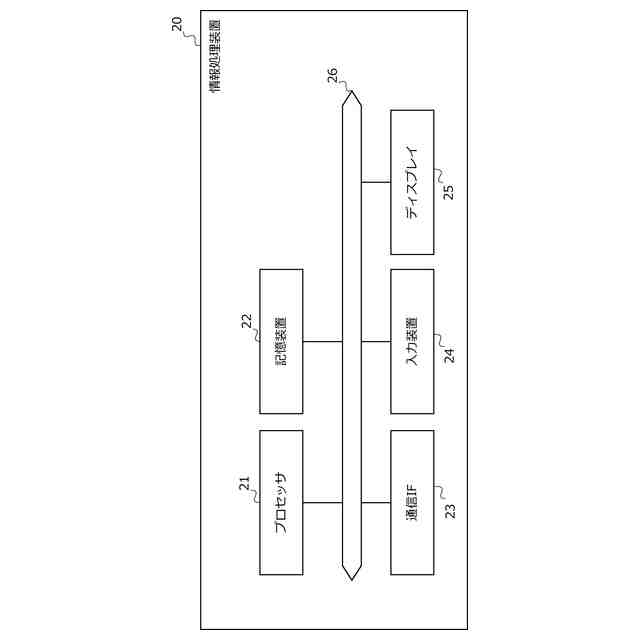
実施形態に係るシステムとして動作可能な情報処理装置の構成例を示す図。
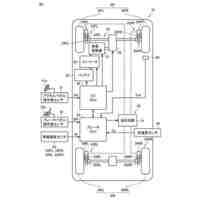
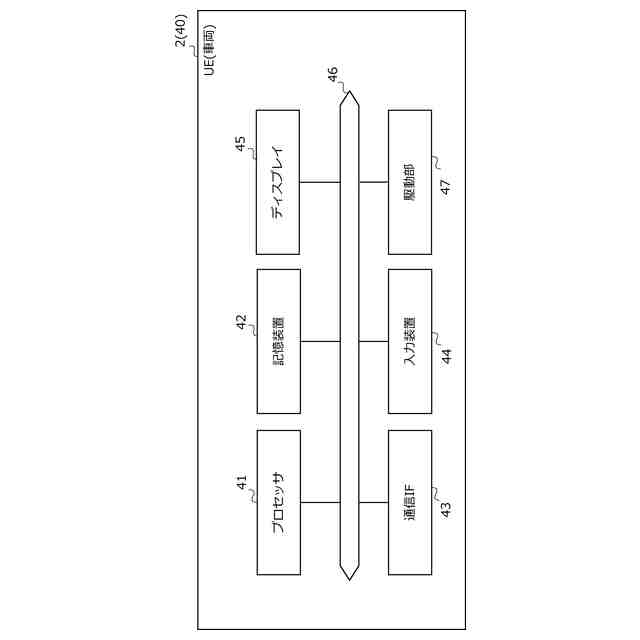
実施形態に係るシステムの端末として動作可能な装置の構成例を示す図。
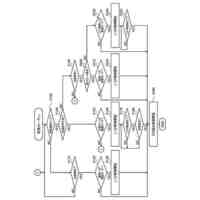
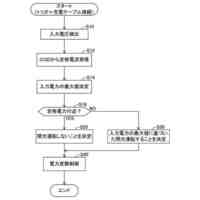
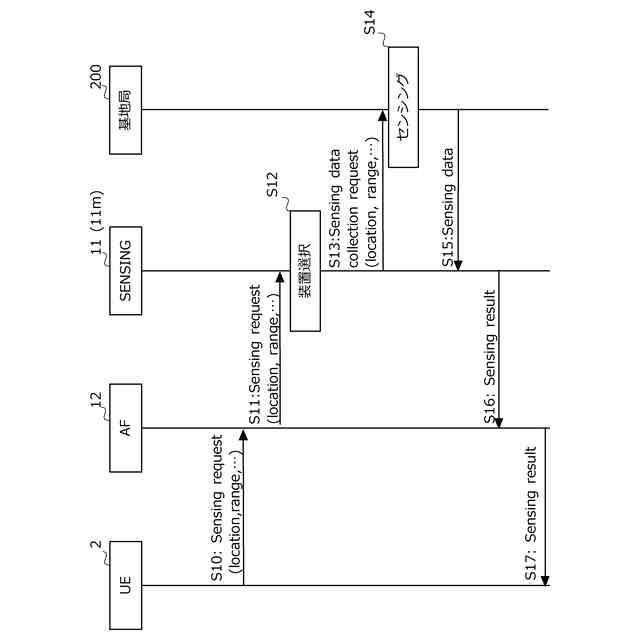
実施形態に係るシステムの制御部が実行するセンシング処理に関するシーケンス図。
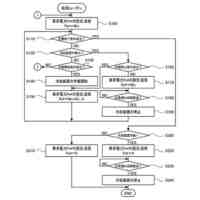
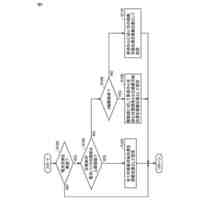
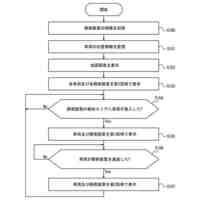
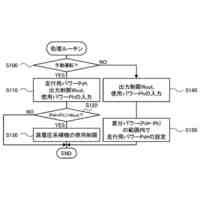
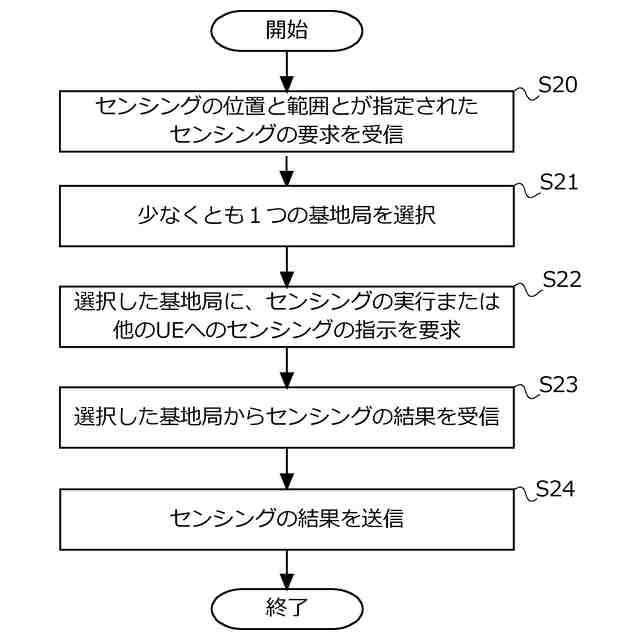
実施形態に係るシステムの制御部が実行するセンシング処理に関するフローチャート。
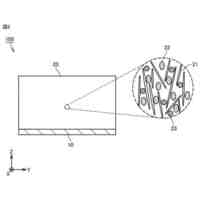
センシングを要求する範囲の表現方法を説明する図。
実施形態に係るシステムが実行するセンシング結果とUEが実行するセンシング結果を混合する処理の概念図。
【発明を実施するための形態】
【0010】
ユーザ端末(UE)による所定の領域のセンシングの結果が良好でない場合について説明する。UEは、5Gシステムにおいて基地局(gNB)または他のユーザ端末(UE)が無線通信に利用する電波を使って行う物体のセンシングである5Gセンシングを当該領域に併せて行った結果を取得することでセンシングの結果を補完することが考えられる。一例として、UEは移動通信端末を搭載した車両である。このようなシステムにおいて、UEには、所定の領域における、センシング結果が良好でない特定の範囲を指定して、5Gセンシングの結果を取得するニーズがある。例えば、UEである車両が車載カメラによって、所定の領域をセンシングする場合に、夜間等、センシング対象となる所定の領域の明るさが十分でないことが想定される。このようなときは、所定の領域の明るさが十分でないことから車載カメラによるセンシングの結果が良好でない可能性がある。そこで、UEである車両は、所定の領域のうち、良好なセンシング結果が得られなかった特定の範囲について、別の主体によって行われたセンシングの結果を取得して利用することで、十分な品質のセンシングの結果を得ることができる。したがって、システムは、UEから指定された特定の範囲のセンシングの結果を取得して、UEに送信できることが望ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
方法
16日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
方法
23日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
電極
23日前
トヨタ自動車株式会社
車両
13日前
トヨタ自動車株式会社
車両
28日前
トヨタ自動車株式会社
装置
27日前
トヨタ自動車株式会社
方法
27日前
トヨタ自動車株式会社
方法
13日前
トヨタ自動車株式会社
電池
27日前
トヨタ自動車株式会社
電極
27日前
トヨタ自動車株式会社
膜体
1日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
電動車
22日前
トヨタ自動車株式会社
自動車
1か月前
トヨタ自動車株式会社
電動車
16日前
トヨタ自動車株式会社
電極体
21日前
トヨタ自動車株式会社
モータ
13日前
トヨタ自動車株式会社
充電器
13日前
トヨタ自動車株式会社
充電器
16日前
トヨタ自動車株式会社
モータ
15日前
トヨタ自動車株式会社
モータ
22日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
軸部材
1か月前
トヨタ自動車株式会社
電動車
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ