TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099132
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023215556
出願日
2023-12-21
発明の名称
垂直多関節ロボット、および、カバー
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
19/00 20060101AFI20250626BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ケーブルがロボットアームおよび周辺装置に干渉することの防止と、ケーブルが損傷することの防止とを両立する技術を提供する。
【解決手段】垂直多関節ロボットは、第1アームと、第1アームに接続され、第1回転軸まわりに回転する第2アームと、第1アームの内部で配線を収容する第1収容部と、を備える。第1収容部は、配線を第1回転軸方向に沿って引き出す第1配線孔を有することを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
第1アームと、
前記第1アームに接続され、第1回転軸まわりに回転する第2アームと、
前記第1アームの内部で配線の一部を収容する第1収容部と、を備え、
前記第1収容部は、前記配線を前記第1回転軸方向に沿って引き出す第1配線孔を有することを特徴とする、垂直多関節ロボット。
続きを表示(約 930 文字)
【請求項2】
前記第2アームの内部で前記配線の一部を収容する第2収容部を備え、
前記第2収容部は、前記第1配線孔から引き出される前記配線を前記第2収容部の内部に引き込む第2配線孔を有する、請求項1に記載の垂直多関節ロボット。
【請求項3】
前記第2アームに接続され、第2回転軸まわりに回転する第3アームを備え、
前記第2収容部は、前記第2収容部に収容される前記配線の一部を前記第2回転軸方向に沿って引き出す第3配線孔を有する、請求項2に記載の垂直多関節ロボット。
【請求項4】
前記第1回転軸は、前記第1アームの長手方向に対して交差する方向に延びている、請求項1に記載の垂直多関節ロボット。
【請求項5】
前記第3アームは、前記第3配線孔から引き出された前記配線を固定するための固定部材を有する、請求項3に記載の垂直多関節ロボット。
【請求項6】
前記第1収容部は、前記第1アームの筐体と、前記筐体に取り付けられたカバー部材と、から構成されている、請求項1に記載の垂直多関節ロボット。
【請求項7】
前記第1収容部は、前記第2アームが接続されている側とは反対側に配置され、前記配線の端部を引き出す第4配線孔を備える、請求項1に記載の垂直多関節ロボット。
【請求項8】
前記配線の一部を収容する筒状部材であって、前記第1配線孔と前記第2配線孔とを繋ぎ、前記垂直多関節ロボットの動作に伴って変形可能な筒状部材、を備える、請求項2に記載の垂直多関節ロボット。
【請求項9】
前記筒状部材には、前記筒状部材の長手方向に沿って切れ目が入れられている、請求項8に記載の垂直多関節ロボット。
【請求項10】
第1アームと、前記第1アームに接続され、回転軸まわりに回転する第2アームと、を有する垂直多関節ロボットに取り付けられるカバーであって、
前記第1アームに取り付けられ、配線の一部を収容する収容部を備え、
前記収容部は、前記配線を前記回転軸方向に沿って引き出す配線孔を有する、ことを特徴とするカバー。
発明の詳細な説明
【技術分野】
【0001】
本開示は、垂直多関節ロボット、および、カバーに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
ロボットアームの外側にケーブルを配置する様々な技術が知られている。例えば、特許文献1に記載の技術においては、ロボットアームに配置されたケーブルが、干渉防止のため、ケーブル支持枠と伸縮可能な筒状のガイド部材とを用いて留められている。
【先行技術文献】
【特許文献】
【0003】
特開2014-46443号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ケーブルがロボットアームおよび周辺装置に干渉することの防止と、ケーブルが損傷することの防止とを両立することが難しいため、これらの両立ができる技術が求められていた。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の第1形態によれば、垂直多関節ロボットが提供される。この垂直多関節ロボットは、第1アームと、前記第1アームに接続され、第1回転軸まわりに回転する第2アームと、前記第1アームの内部で配線の一部を収容する第1収容部と、を備える。前記第1収容部は、前記配線を前記第1回転軸方向に沿って引き出す第1配線孔を有することを特徴とする。
【0007】
本開示の第2形態によれば、第1アームと、前記第1アームに接続され、回転軸まわりに回転する第2アームと、を有する垂直多関節ロボットに取り付けられるカバーが提供される。このカバーは、前記第1アームに取り付けられ、配線の一部を収容する収容部を備える。前記収容部は、前記配線を前記回転軸方向に沿って引き出す配線孔を有する、ことを特徴とする。
【図面の簡単な説明】
【0008】
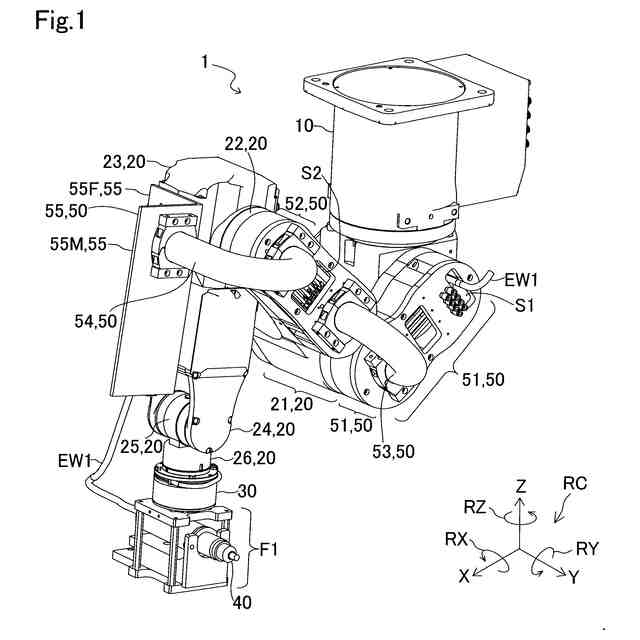
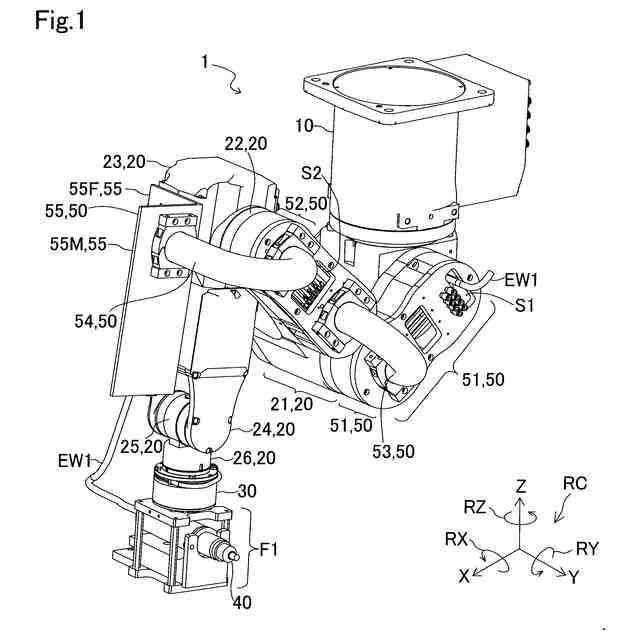
本実施形態にかかるロボットの全体構成を示す斜視図である。
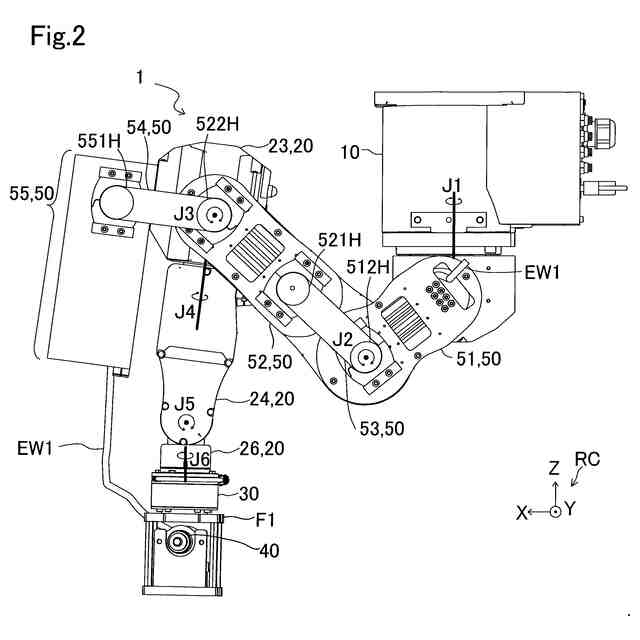
ロボットの側面図である。
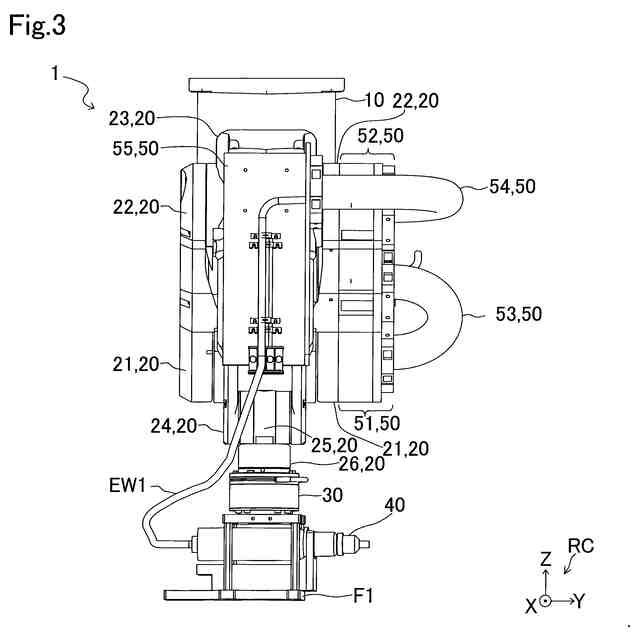
ロボットの正面図である。
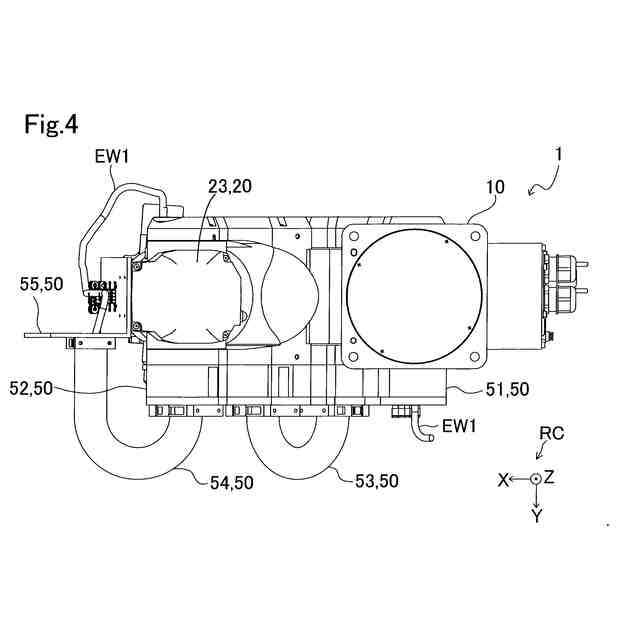
ロボットの平面図である。
ロボットの下面図である。
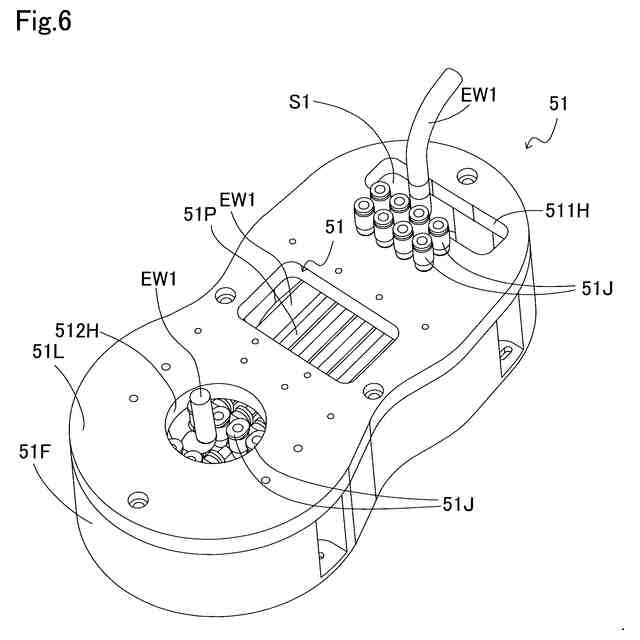
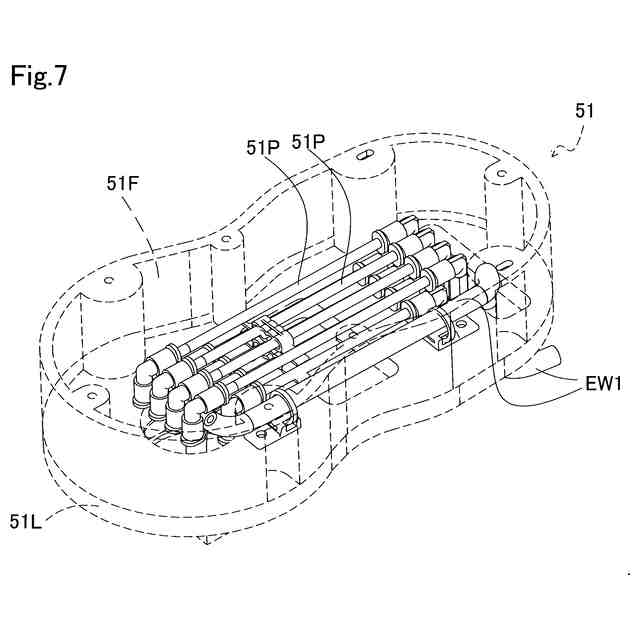
第1ケースの外観を示す斜視図である。
第1ケース内に配置された配線の例を示した説明図である。
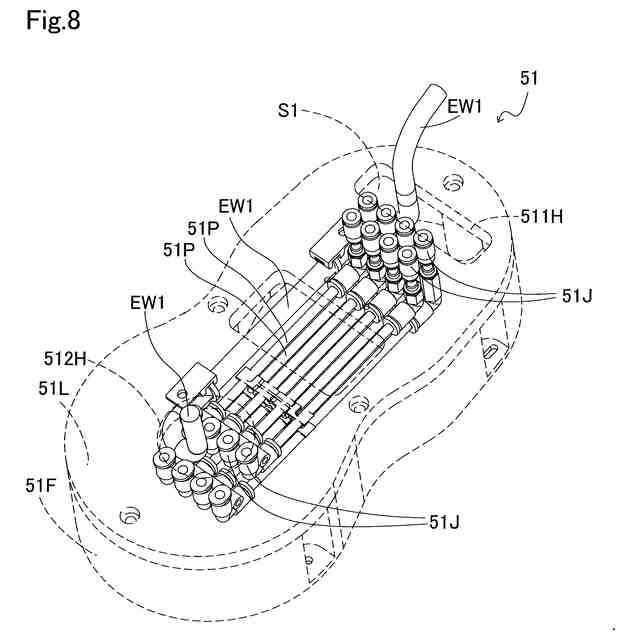
異なる方向から見た場合の第1ケース内に配置された配線の例を示した説明図である。
第2ケースの外観を示す斜視図である。
第2ケース内に配置された配線の例を示した説明図である。
【発明を実施するための形態】
【0009】
A.実施形態:
図1は、本実施形態にかかるロボット1の全体構成を示す斜視図である。図2は、ロボット1の側面図である。図3は、ロボット1の正面図である。図4は、ロボット1の平面図である。図5は、下面図である。
【0010】
ロボット1は、垂直多関節ロボットである。ロボット1は、ロボットコントローラーにより制御される。なお、図1においてはロボットコンロトーラーの図示を省略している。ロボット1は、例えば、生産ラインにおいて製造工程の一部である組み立て作業を行う。ロボット1は、基台10と、アーム20と、力覚センサー30と、エンドエフェクター40と、配線収容部材50とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
1か月前
住友重機械工業株式会社
教示装置
27日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
川崎重工業株式会社
ロボット
28日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
27日前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社マキタ
電気機器
28日前
ホシデン株式会社
分解用治具
1か月前
アピュアン株式会社
衝撃工具
1か月前
積水ハウス株式会社
フィルム除去具
今日
株式会社スター精機
産業用ロボット
2か月前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社不二越
協働ロボットシステム
5日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
株式会社安川電機
ロボット
2か月前
株式会社安川電機
ロボット
2か月前
株式会社安川電機
ロボット
2か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社ジャノメ
ロボット
1か月前
株式会社清水製作所
電動工具の吊下げ具
9日前
セイコーエプソン株式会社
ロボット
1か月前
コネクテッドロボティクス株式会社
保持システム
2日前
株式会社マキタ
打撃工具
9日前
北越メタル株式会社
鉄筋保持具
5日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ