TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025097131
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213248
出願日
2023-12-18
発明の名称
遠隔作業システム、作業装置、及び、制御装置
出願人
日立GEニュークリア・エナジー株式会社
代理人
弁理士法人磯野国際特許商標事務所
主分類
B25J
9/14 20060101AFI20250623BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業装置の移動性を向上させる。
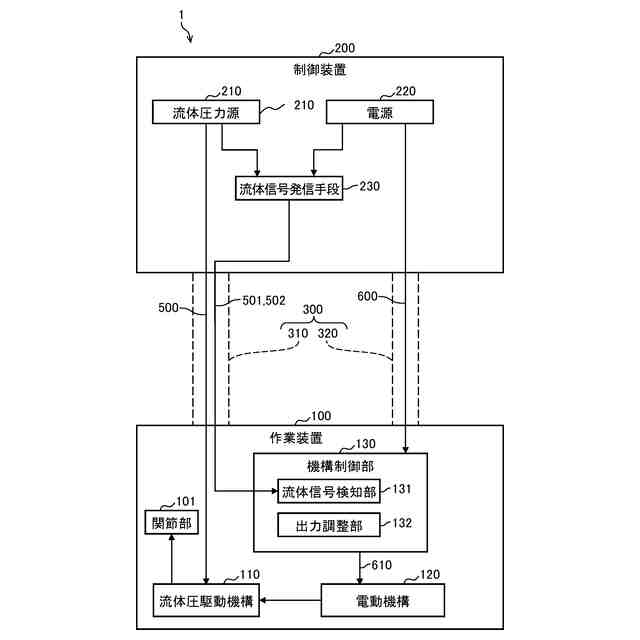
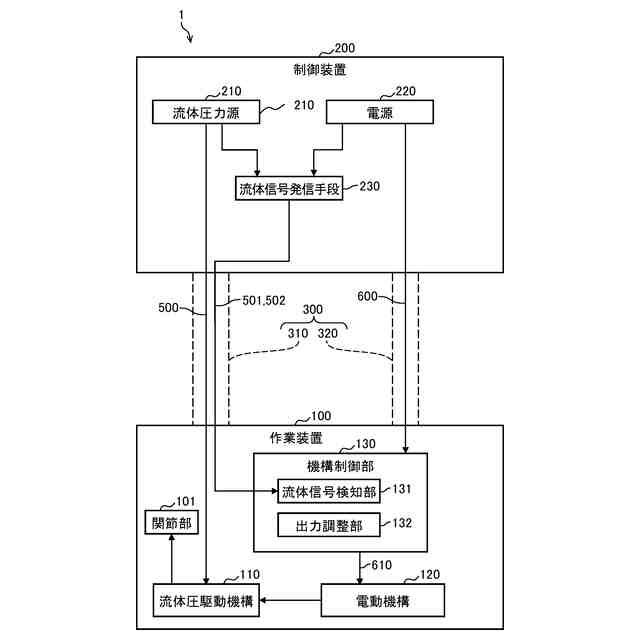
【解決手段】遠隔作業システム1は、作業装置100と、作業装置100の動作を制御する制御装置200と、作業装置100と制御装置200を接続するケーブル300と、を備える。作業装置100は、流体500の圧力で駆動する流体圧駆動機構110と、電力600で駆動して流体圧駆動機構110の駆動量を調整する電動機構120と、電動機構120の動作を制御する機構制御部130と、を有する。制御装置200は、ケーブル300を介して、電力600と、流体圧駆動機構110の駆動に用いる流体500と、機構制御部130の制御に用いる流体信号502が付加された流体501と、を作業装置100に送る。流体信号502は、圧力を流体501に印加することで形成された任意のパターンの信号になっている。
【選択図】図3
特許請求の範囲
【請求項1】
作業装置と、
前記作業装置の動作を制御する制御装置と、
前記作業装置と前記制御装置を接続するケーブルと、を備え、
前記作業装置は、
流体の圧力で駆動する流体圧駆動機構と、
電力で駆動して前記流体圧駆動機構の駆動量を調整する電動機構と、
前記電動機構の動作を制御する機構制御部と、を有し、
前記制御装置は、前記ケーブルを介して、前記電力と、前記流体圧駆動機構の駆動に用いる流体と、前記機構制御部の制御に用いる流体信号が付加された流体と、を前記作業装置に送り、
前記流体信号は、圧力を流体に印加することで形成された任意のパターンの信号である、
ことを特徴とする遠隔作業システム。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の遠隔作業システムにおいて、
前記制御装置は、
前記圧力を前記流体に印加する流体圧力源と、
前記電力を前記作業装置に供給する電源と、
前記流体信号を生成して前記作業装置に発信する流体信号発信手段と、を有し、
前記ケーブルは、
前記電力を前記作業装置に送る電力伝達経路と、
前記駆動に用いる流体及び前記流体信号が付加された流体を、同一の流体として又は別々の流体として前記作業装置に送る流体伝達経路と、を有する、
ことを特徴とする遠隔作業システム。
【請求項3】
請求項2に記載の遠隔作業システムにおいて、
前記流体伝達経路は、前記作業装置の内部で複数の系統に分岐して設けられており、
前記流体圧駆動機構は、前記流体の圧力で駆動する複数のアクチュエータを有し、
前記電動機構は、前記流体伝達経路の各系統で前記流体の流れを切り替える弁を有する、
ことを特徴とする遠隔作業システム。
【請求項4】
請求項3に記載の遠隔作業システムにおいて、
前記流体圧駆動機構は、複数の系統を有し、
前記電動機構は、
1つの流路から複数の流路に流体を分配する流体分配部を有し、
前記流体伝達経路で供給される流体を前記流体分配部で前記流体圧駆動機構の系統ごとに分配する、
ことを特徴とする遠隔作業システム。
【請求項5】
請求項4に記載の遠隔作業システムにおいて、
前記作業装置は、
前記流体を流す流路を開閉する複数の電磁弁と、
関節部の駆動に用いる複数のアクチュエータと、を有し、
前記電磁弁を開放して前記アクチュエータの駆動を開始した後に、前記電磁弁の閉止と開放を繰り返し行い、さらに、前記電磁弁の閉止中に前記アクチュエータの駆動の停止を行う、
ことを特徴とする遠隔作業システム。
【請求項6】
請求項4に記載の遠隔作業システムにおいて、
前記流体を流す流路を開閉する複数の電磁弁を有し、
前記制御装置の前記流体信号発信手段は、前記流体信号の圧力を増やす加圧手段と、前記流体信号の圧力を減らす減圧手段と、を有し、前記加圧手段と前記減圧手段により、前記流体伝達経路内の前記流体信号に用いる流体の圧力を変更することで、前記流体信号の印可圧を制御し、
前記作業装置の前記機構制御部は、前記印可圧が任意の設定値以下の場合に自動的に閉止する背圧弁と、前記流体信号の印可圧を検知する圧力検知手段と、を有し、前記背圧弁が閉止することで、前記設定値以下の圧力領域で前記電動機構への前記電磁弁の閉止信号の送信が可能になる、
ことを特徴とする遠隔作業システム。
【請求項7】
請求項6に記載の遠隔作業システムにおいて、
前記機構制御部は、前記流体信号の圧力に応じて前記電力伝達経路で供給される電力を調整して前記電動機構へ出力する出力調整部を有し、
前記背圧弁は、前記圧力検知手段と前記流体分配部との間に配置される、
ことを特徴とする遠隔作業システム。
【請求項8】
請求項6に記載の遠隔作業システムにおいて、
前記電磁弁の閉止信号の値は、前記背圧弁の閉止用の設定値以下の圧力値に割り当てられており、
前記作業装置の前記機構制御部は、前記電磁弁の開放中であっても、前記設定値以下の圧力領域で前記電動機構への前記電磁弁の閉止信号の送信が可能になる、
ことを特徴とする遠隔作業システム。
【請求項9】
流体の圧力で駆動する流体圧駆動機構と、
電力で駆動して前記流体圧駆動機構の駆動量を調整する電動機構と、
前記電動機構の動作を制御する機構制御部と、を有し、
外部から、ケーブルを介して、前記電力と、前記流体圧駆動機構の駆動に用いる流体と、前記機構制御部の制御に用いる流体信号が付加された流体と、を受け付け、
前記流体信号は、圧力を流体に印加することで形成された任意のパターンの信号である、
ことを特徴とする作業装置。
【請求項10】
作業装置の動作を制御する制御装置であって、
圧力を流体に印加する流体圧力源と、
電力を前記作業装置に供給する電源と、
流体信号を生成して前記作業装置に発信する流体信号発信手段と、を有し、
前記流体信号は、圧力を流体に印加することで形成された任意のパターンの信号である、
ことを特徴とする制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、遠隔作業システム、作業装置、及び、制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、発電所や、プラント、災害現場等の比較的過酷な労働環境における作業では、作業員の代わりとして作業装置(ロボット)を用いた遠隔作業システムが活用される。作業装置は、狭窄部を通過することがあるため、小型化が求められる。その一方で、作業装置は、ガレキの把持や不整地の移動等の高出力が要求される。また、比較的過酷な労働環境として放射線量が高い場所がある。しかしながら、作業装置の駆動に用いるステップモータや制御に用いる半導体センサ等の精密なエレクトロニクス機器は放射線に弱い。そのため、作業装置は、放射線量が高い場所で長時間使用することが困難である。そのため、作業装置では、モータやセンサ等のエレクトロニクス機器を極力使用しないことが望まれている。
【0003】
これらのことから、作業装置は、エネルギー密度が高い流体圧で駆動することが好ましい。そこで、作業環境から離れた整備環境に制御装置を設置し、ケーブルで制御装置と作業装置とを接続して、流体圧で作業装置を駆動する構成の遠隔作業システムが提供されている。この構成の遠隔作業システムは、遠隔地から作業地に動力を供給することによって、作業装置の小型化や、防塵性、防水性、耐放射線性等の耐環境性の向上を図ることが可能である。
【0004】
この構成の遠隔作業システムに関連して、ケーブルが意図せぬ障害物に引っ掛かることを低減するために、例えば、特許文献1に記載の技術が提案されている。特許文献1には、ケーブルを浮上させることで、流体圧で駆動する作業装置のケーブルの移動性への影響を軽減する技術が記載されている。このような特許文献1に記載された従来技術は、ケーブルを浮上させることにより、床面とケーブルの摩擦による移動性への影響を解消することができる。
【先行技術文献】
【特許文献】
【0005】
特開2017-164069号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載された従来技術は、作業装置の到達可能範囲を増やすために、ケーブルを長くすると、ケーブルを浮上/移動させるための中間ノズルを多数設けなければならなくなる。これにより、中間ノズルを制御するための電気信号線が増え、ケーブルの重量と太さが増加する。つまり、特許文献1に記載された従来技術は、制御装置と作業装置とを接続する制御信号用の電気信号線を複数設けなければならないため、ケーブルの重量と太さが増加する。これにより、ケーブルの慣性や床面との摩擦が増加したり、ケーブルの可撓性(柔軟性)が低下したりする。そのため、ケーブルを牽引する作業装置の移動性を低下させている。
【0007】
本発明は、前記した課題を解決するためになされたものであり、作業装置の移動性を向上させる遠隔作業システム、作業装置、及び、制御装置を提供することを主な目的とする。
【課題を解決するための手段】
【0008】
前記目的を達成するため、本発明は、遠隔作業システムであって、作業装置と、前記作業装置の動作を制御する制御装置と、前記作業装置と前記制御装置を接続するケーブルと、を備え、前記作業装置は、流体の圧力で駆動する流体圧駆動機構と、電力で駆動して前記流体圧駆動機構の駆動量を調整する電動機構と、前記電動機構の動作を制御する機構制御部と、を有し、前記制御装置は、前記ケーブルを介して、前記電力と、前記流体圧駆動機構の駆動に用いる流体と、前記機構制御部の制御に用いる流体信号が付加された流体と、を前記作業装置に送り、前記流体信号は、圧力を流体に印加することで形成された任意のパターンの信号である、構成とする。
その他の手段は、後記する。
【発明の効果】
【0009】
本発明によれば、制御装置と作業装置とを接続する制御信号用の電気信号線を不要化して、ケーブルの重量と太さを減らすことで、作業装置の移動性を向上させることができる。
【図面の簡単な説明】
【0010】
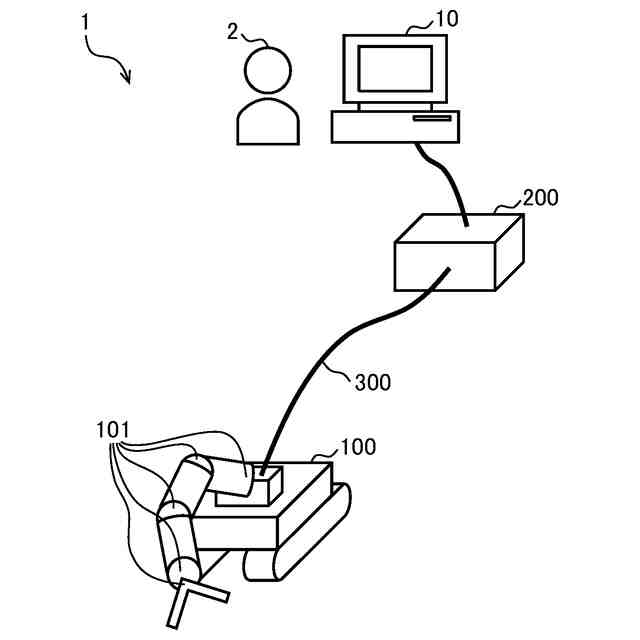
実施形態1に係る遠隔作業システム全体の概略構成図である。
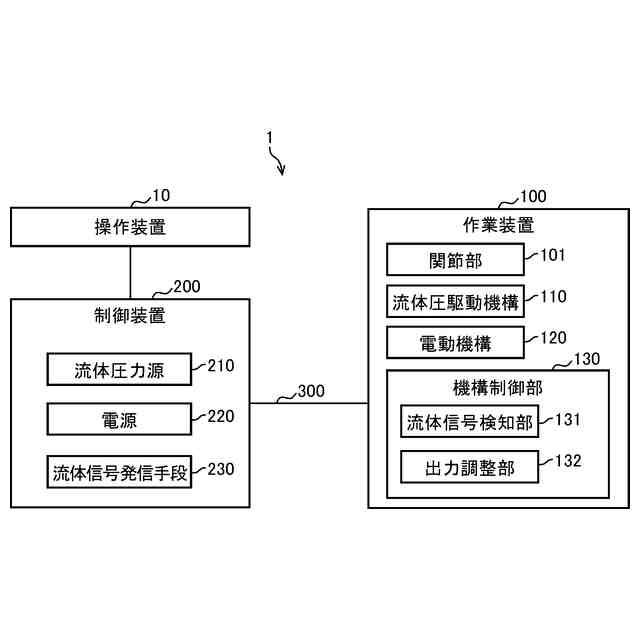
実施形態1に係る遠隔作業システムの内部ブロック図である。
実施形態1に係る遠隔作業システムの内部の概略構成図である。
実施形態1に係る遠隔作業システムの動作説明図である。
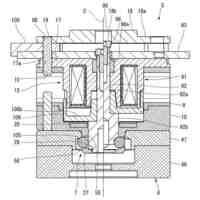
作業装置に用いるアクチュエータの概略構成図(1)である。
作業装置に用いるアクチュエータの概略構成図(2)である。
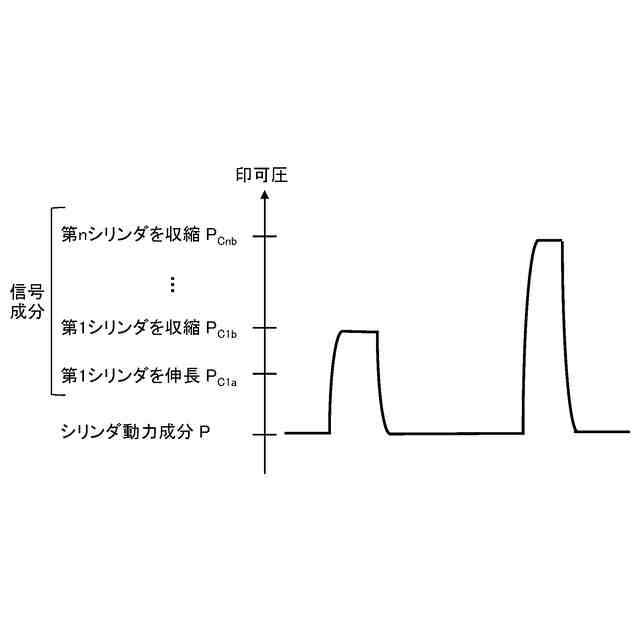
流体信号に含まれる電磁弁の開閉信号成分の説明図である。
実施形態1に係る遠隔作業システムの動作説明図である。
実施形態1に係る遠隔作業システムの動作説明図である。
アクチュエータの駆動開始後の課題の説明図である。
課題を解決する作業装置の動作説明図である。
実施形態2に係る遠隔作業システムの内部ブロック図である。
実施形態2に係る遠隔作業システムの内部の概略構成図である。
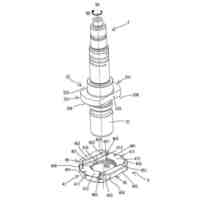
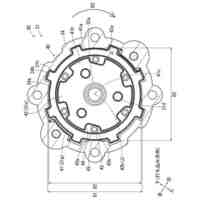
流体分配部の動作説明図(1)である。
流体分配部の動作説明図(2)である。
実施形態3に係る遠隔作業システムの内部の概略構成図である。
加圧手段の概略構成図である。
加圧手段の動作説明図である。
減圧手段の概略構成図である。
減圧手段の動作説明図である。
実施形態3に係る遠隔作業システムの動作説明図である。
電磁弁と背圧弁の動作説明図である。
背圧弁を設けていない場合の流体信号の説明図である。
背圧弁を設けている場合の流体信号の説明図である。
背圧弁を設けていない場合の作業装置の動作説明図である。
背圧弁を設けている場合の作業装置の動作説明図である。
比較例の遠隔作業システムの概略構成図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
8日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
個人
ペグハンマおよびペグハンマ用部品
1日前
株式会社ダイヘン
搬送装置
1日前
東京都公立大学法人
対象物把持装置
1か月前
工機ホールディングス株式会社
作業機
23日前
工機ホールディングス株式会社
作業機
23日前
工機ホールディングス株式会社
作業機
23日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
学校法人五島育英会
アーム機構
1か月前
株式会社PILLAR
チューブ保持治具
1か月前
住友重機械工業株式会社
支援装置
1日前
住友重機械工業株式会社
支援装置
1日前
オークラ輸送機株式会社
ハンド装置
1か月前
ホシデン株式会社
分解用治具
1日前
アピュアン株式会社
衝撃工具
3日前
株式会社スター精機
産業用ロボット
29日前
オークラ輸送機株式会社
ハンド装置
16日前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
17日前
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
1日前
株式会社マキタ
電動作業機
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社安川電機
ロボット
29日前
株式会社安川電機
ロボット
29日前
株式会社安川電機
ロボット
29日前
株式会社ジャノメ
ロボット
25日前
小倉クラッチ株式会社
ロボット用ツール交換装置
1か月前
セイコーエプソン株式会社
ロボット
11日前
セイコーエプソン株式会社
ロボット
1か月前
株式会社マキタ
回転工具
18日前
株式会社マキタ
電動工具
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ