TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096541
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2025065956,2023087336
出願日
2025-04-12,2023-05-27
発明の名称
ロボット装置
出願人
トライエンジニアリング株式会社
代理人
弁理士法人石黒国際特許事務所
主分類
B25J
13/08 20060101AFI20250619BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
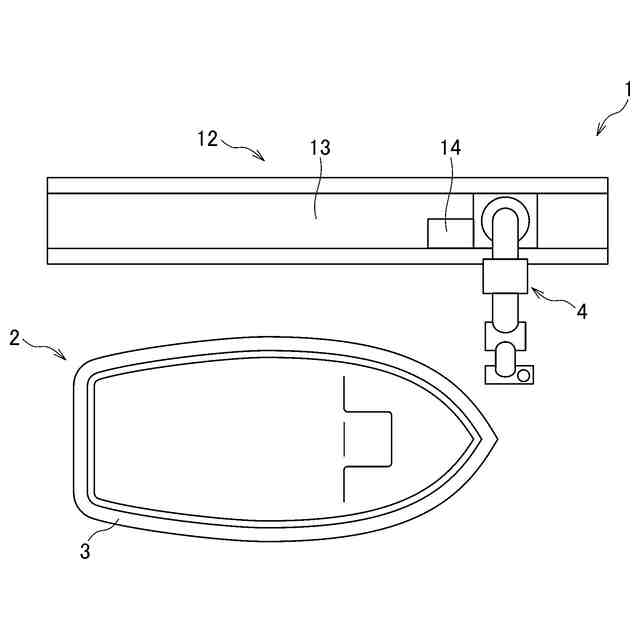
【課題】ロボット装置1において、体格が大きなワーク2を満足に加工できるようにする。
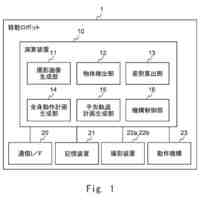
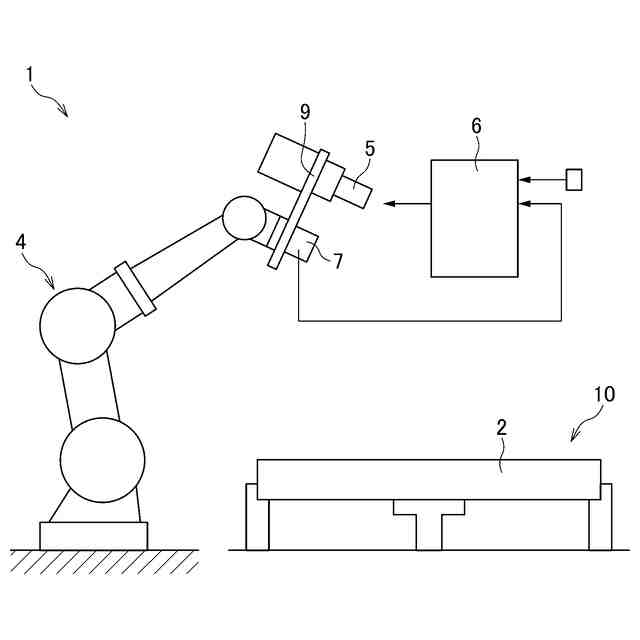
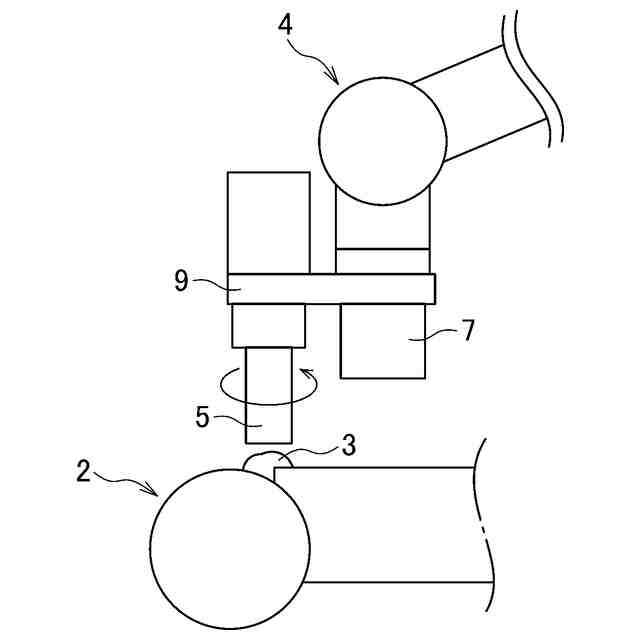
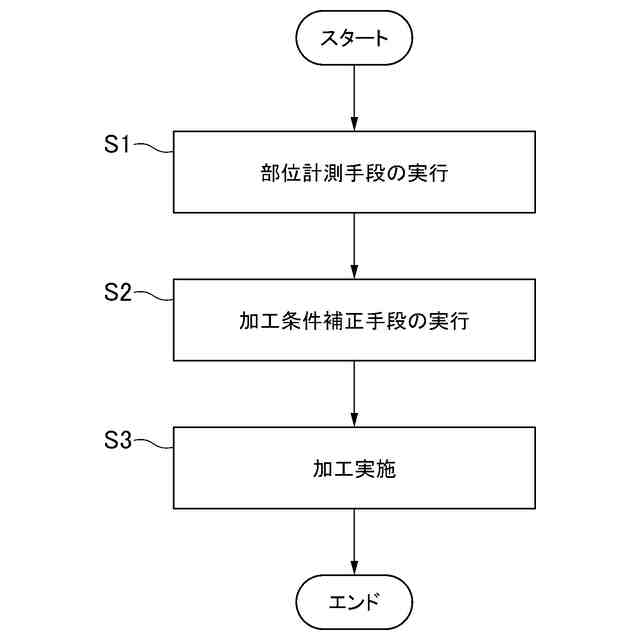
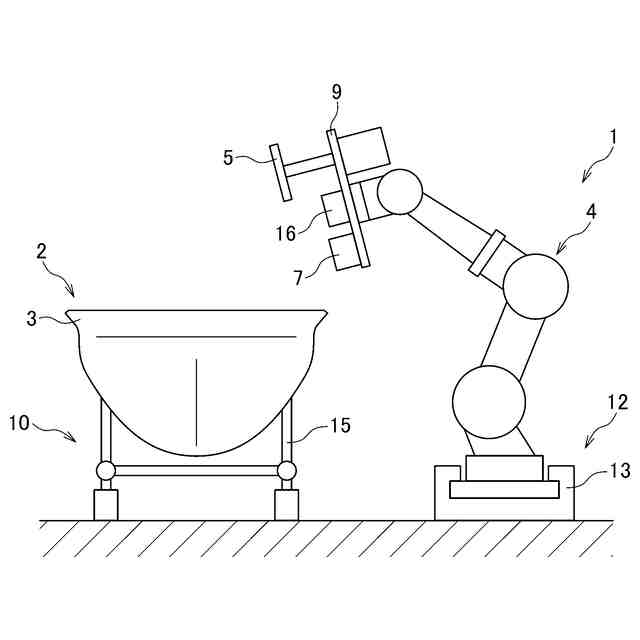
【解決手段】ロボット装置1は、ロボット4に装着した加工具5を3次元的に移動させながら、ワーク2を加工するものであり、以下の部位計測手段、および、加工条件補正手段を備える。まず、部位計測手段は、加工具5による加工にあたり、ワーク2の位置および姿勢を決めた状態で、ワーク2における加工部位3の状態を計測する。また、加工条件補正手段は、ワーク2を加工するための加工条件として事前に設定された初期加工条件を、部位計測手段により得られた加工部位3の状態に基づき補正する。そして、ロボット装置1は、加工条件補正手段による補正後の加工条件を用いてワーク2の加工を制御する。これにより、ロボット装置1は、体格が大きなワーク2を満足に加工することができる。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットに装着した加工具を3次元的に移動させながら、ワークを加工するロボット装置において、
前記加工具による加工にあたり、前記ワークの位置および姿勢を決めた状態で、前記ワークにおける加工部位の状態を計測する部位計測手段と、
前記ワークを加工するための加工条件として事前に設定された初期加工条件を、前記部位計測手段により得られた前記加工部位の状態に基づき補正する加工条件補正手段とを備え、
この加工条件補正手段による補正後の加工条件を用いて前記ワークの加工を制御し、
また、前記ロボット装置は、
前記加工具による加工にあたり、前記ワークの位置および姿勢を決めた状態で、前記ワークの位置および姿勢を計測する全体計測手段と、
前記部位計測手段により前記加工部位の状態を計測するための計測条件として事前に設定された初期計測条件を、前記全体計測手段により得られた前記ワークの位置および姿勢に基づき補正する計測条件補正手段とを備え、
前記部位計測手段は、この計測条件補正手段による補正後の計測条件を用いて前記加工部位の状態を計測し、
さらに、前記ロボット装置は、
前記ロボットに装着されて3次元的に移動し、前記加工部位の状態に応じた信号を発生する部位検出手段を備え、
前記部位計測手段は、この部位検出手段が発生する信号に基づき、前記加工部位の状態を計測し、
また、前記部位計測手段は、前記部位検出手段を前記計測条件補正手段による補正後の移動軌跡に従って移動させつつ、前記ワークの断面のプロファイルに応じた信号を発生させるとともに、このプロファイルに関する情報を取得し、
前記部位計測手段により取得されるプロファイルには、段が切り立っており、
前記加工条件補正手段は、前記部位計測手段が取得した、前記段が切り立っているプロファイルに基づき、前記加工具の移動軌跡を修正することを特徴とするロボット装置。
続きを表示(約 90 文字)
【請求項2】
請求項1に記載のロボット装置において、
前記全体計測手段は、前記ワークの位置および姿勢を3点計測により計測することを特徴とするロボット装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに装着した加工具を3次元的に移動させながら、ワークを加工するロボット装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、上記のようなロボット装置では、ワークの位置および姿勢を決めた状態で、ロボットを動作させて加工具による加工を行うことが公知である(例えば、特許文献1参照。)。
【0003】
特許文献1によれば、自動車のドアパネルのように、複数の金属板体を重ねて構成されるワークの周縁を、ロボットに装着した加工具としてのローラによりヘム加工するローラ式ヘミング加工装置が開示されている。そして、この加工装置によれば、所定の加工スペースに下型が設置されており、この下型にワークを載せるとともに、事前のティーチングにより設定した加工条件に従ってロボットを動作させることで、同じ型の多数のワークを一品ごとにヘム加工していくことができる。
【0004】
近年、金属材料、樹脂材料等の素材に関わりなく、ドアパネルよりも遥かに体格が大きいワークをロボット装置により加工する需要が高まっているが、このように体格が大きいワークをロボット装置により加工する場合、体格の大きさに起因して以下のような問題が発生している。
【0005】
例えば、鉄道車両の台車の製造工程では、各種の金属部材を溶接により一体化した大型の金属構造体をワークとして、溶接部の余肉をフェイスミル等により除去する。しかし、このようなワークでは、溶接歪に伴う変形量が大きいので、事前のティーチングにより設定した加工条件に従ってロボット装置を動作させても、満足に加工することが難しい。
【0006】
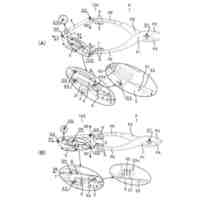
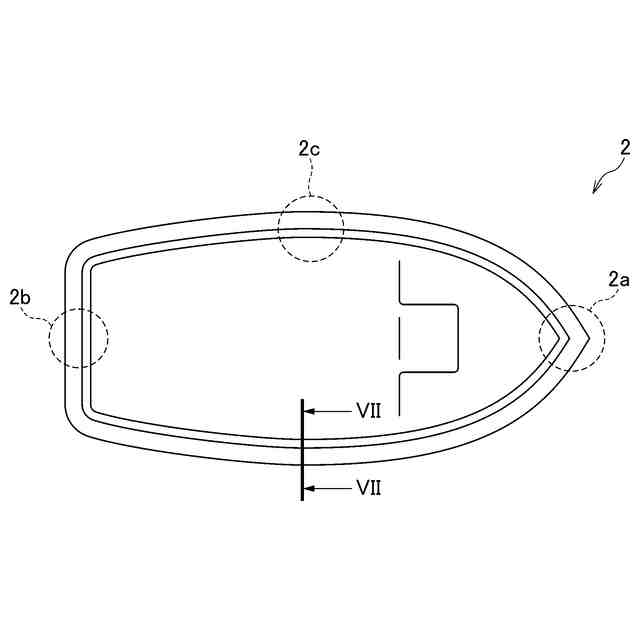
また、モータボートのデッキやハルの製造工程では、FRPを主な素材とする大型の樹脂成形品をワークとして、余材をエンドミル・丸鋸等により切除する。しかし、このようなワークでは、熱収縮に伴う変形量が大きいので、事前のティーチングにより設定した加工条件に従ってロボット装置を動作させても、同様に満足に加工することが難しい。
【0007】
また、上記のような体格が大きいワークに関しては、一品ごとに、精度よく位置および姿勢を決めることが難しく、位置および姿勢をラフに決めてしまうことが多い。このため、ワークの位置および姿勢も一品ごとに大きく変動してしまい、より一層、ロボット装置による加工を困難にしている。
【先行技術文献】
【特許文献】
【0008】
特開2011-041972号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本開示は、上記の問題点を解決するためになされたものであり、その目的は、ロボット装置において、体格が大きなワークに関しても満足に加工できるようにすることにある。
【課題を解決するための手段】
【0010】
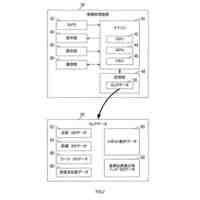
本開示のロボット装置は、ロボットに装着した加工具を3次元的に移動させながら、ワークを加工するものであり、以下の部位計測手段、および、加工条件補正手段を備える。まず、部位計測手段は、加工具による加工にあたり、ワークの位置および姿勢を決めた状態で、ワークにおける加工部位の状態を計測する。また、加工条件補正手段は、ワークを加工するための加工条件として事前に設定された初期加工条件を、部位計測手段により得られた加工部位の状態に基づき補正する。
そして、ロボット装置は、加工条件補正手段による補正後の加工条件を用いてワークの加工を制御する。
また、ロボット装置は、以下の全体計測手段、および、計測条件補正手段を備える。まず、全体計測手段は、加工具による加工にあたり、ワークの位置および姿勢を決めた状態で、ワークの位置および姿勢を計測する。また、計測条件補正手段は、部位計測手段により加工部位の状態を計測するための計測条件として事前に設定された初期計測条件を、全体計測手段により得られたワークの位置および姿勢に基づき補正する。
そして、部位計測手段は、計測条件補正手段による補正後の計測条件を用いて加工部位の状態を計測する。
さらに、ロボット装置は、以下の部位検出手段を備える。すなわち、部位検出手段は、ロボットに装着されて3次元的に移動し、加工部位の状態に応じた信号を発生する。
そして、部位計測手段は、部位検出手段が発生する信号に基づき、加工部位の状態を計測する。
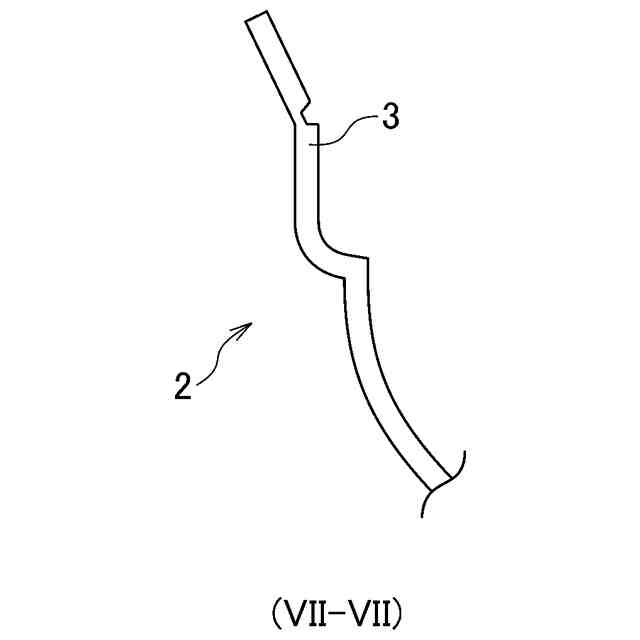
また、部位計測手段は、部位検出手段を計測条件補正手段による補正後の移動軌跡に従って移動させつつ、ワークの断面のプロファイルに応じた信号を発生させるとともに、プロファイルに関する情報を取得し、部位計測手段により取得されるプロファイルには、段が切り立っている。
そして、加工条件補正手段は、部位計測手段が取得した、段が切り立っているプロファイルに基づき、加工具の移動軌跡を修正する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
10日前
個人
ペグハンマおよびペグハンマ用部品
3日前
株式会社ダイヘン
搬送装置
3日前
工機ホールディングス株式会社
作業機
25日前
工機ホールディングス株式会社
作業機
25日前
工機ホールディングス株式会社
作業機
25日前
住友重機械工業株式会社
支援装置
3日前
住友重機械工業株式会社
支援装置
3日前
アピュアン株式会社
衝撃工具
5日前
オークラ輸送機株式会社
ハンド装置
18日前
ホシデン株式会社
分解用治具
3日前
川崎重工業株式会社
ロボットシステム
19日前
株式会社リコー
多関節ロボット
3日前
セイコーエプソン株式会社
ロボット
13日前
株式会社マキタ
電動工具
17日前
株式会社マキタ
回転工具
20日前
SMC株式会社
コンプライアンスユニット
24日前
住友重機械工業株式会社
減速装置選定支援装置
3日前
個人
工具、工具セット、部材取外し方法
13日前
フタバ産業株式会社
ロボット制御装置
3日前
株式会社マキタ
打ち込み工具
13日前
株式会社マキタ
打ち込み工具
13日前
株式会社マキタ
打ち込み工具
13日前
株式会社ミズタニ
工具用グリップ及びグリップ付き工具
5日前
株式会社サンテクノ
プライヤー工具に用いる物品取付構造体
24日前
有限会社Link P&M Japan
非接触支持装置
6日前
有限会社Link P&M Japan
非接触支持装置
6日前
久維科技(蘇州)有限公司
緊固件打ち込み機
18日前
株式会社安川電機
ロボットシステム及び制御方法
3日前
株式会社モコム
E形止め輪挿入工具およびE形止め輪供給装置
4日前
久維科技(蘇州)有限公司
締結部材打ち込み機
18日前
株式会社日立製作所
動作指令生成装置
13日前
工機ホールディングス株式会社
作業機
25日前
トヨタ自動車株式会社
制御システム、制御方法及び制御プログラム
17日前
トヨタ自動車株式会社
制御装置、学習装置、及び訓練データ生成装置
19日前
株式会社京都製作所
ロボットシステム、ロボットシステムの制御方法
24日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ