TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025097167
公報種別
公開特許公報(A)
公開日
2025-06-30
出願番号
2023213301
出願日
2023-12-18
発明の名称
非接触支持装置
出願人
有限会社Link P&M Japan
代理人
個人
,
個人
主分類
B25J
15/06 20060101AFI20250623BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークのリフト力を増加させることができる非接触支持装置を提供する。
【解決手段】非接触支持装置は、メインボディ及びサブボディ40を備えている。各ボディ40には、気体が供給される供給通路部が形成されている。また、各ボディ40には、供給通路部と内側凹部の内周側とに連通され、内側凹部の内周側において旋回流を発生させるべく、軸線方向からみて径方向と交差する方向へ延びて内側凹部の内周面に対して鋭角となる方向へ気体を噴射する気体通路部が形成されている。気体通路部は、上記鋭角となる角度が小さくなる方向へ湾曲して延びている。
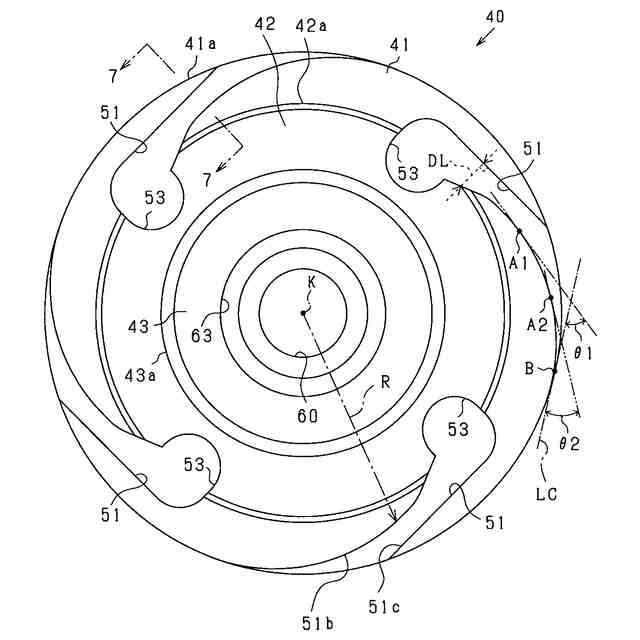
【選択図】 図5
特許請求の範囲
【請求項1】
ワーク(W)に対して気体を噴出することにより前記ワークを非接触状態で支持する非接触支持装置(10)において、
中心軸線(K)が延びる軸線方向、及び前記軸線方向と直交する径方向に延びるボディ(20,40)を備え、
前記ボディの前記軸線方向における第1端部には、前記中心軸線を中心として環状をなすとともに、前記ワークに対向するワーク支持部(21)が形成されており、
前記ボディのうち前記ワーク支持部よりも前記径方向における内側部分には、前記ワーク支持部に対して、前記ボディの前記軸線方向における第2端部側に凹む内側凹部(22)が形成されており、
前記ボディのうち、前記軸線方向において前記内側凹部の底部(23)よりも前記第2端部側には、気体が供給される供給通路部(50)が形成されており、
前記ボディには、前記供給通路部と前記内側凹部の内周側とに連通され、前記内側凹部の内周側において旋回流を発生させるべく、前記軸線方向からみて前記径方向と交差する方向へ延びて前記内側凹部の内周面に対して鋭角となる方向へ気体を噴射する気体通路部(52)が形成されており、
前記気体通路部は、前記鋭角となる角度が小さくなる方向へ湾曲して延びている、非接触支持装置。
続きを表示(約 1,400 文字)
【請求項2】
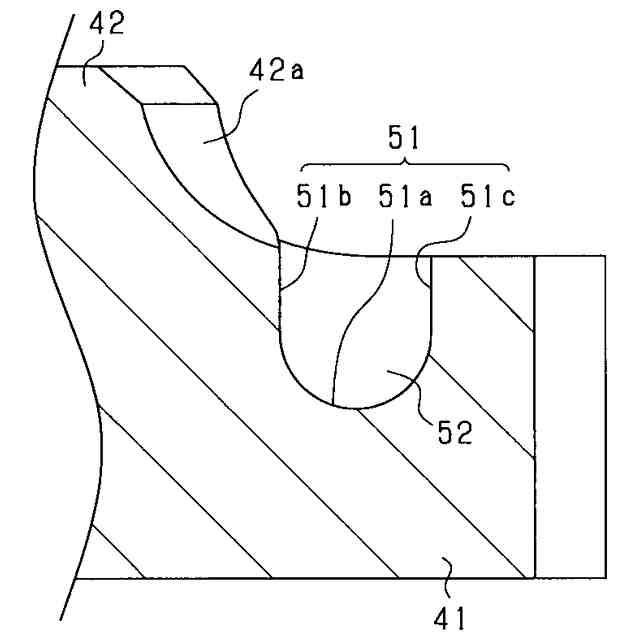
前記気体通路部において前記径方向の内側の壁面(51b)は、曲率半径(R)が徐々に大きくなるような滑らかな曲面である、請求項1に記載の非接触支持装置。
【請求項3】
前記気体通路部において前記供給通路部側から途中部分までの通路面積は徐々に小さくなっており、前記気体通路部において前記途中部分から出口までの通路面積は徐々に大きくなっている、請求項1又は2に記載の非接触支持装置。
【請求項4】
前記気体通路部において前記径方向の外側の壁面(51c)は、前記供給通路部から前記内側凹部に向かって直線状に延びている、請求項3に記載の非接触支持装置。
【請求項5】
前記ボディとして、メインボディ(20)及びサブボディ(40)が備えられ、
前記メインボディの前記軸線方向における前記第1端部には、円環状をなす前記ワーク支持部が形成されており、
前記メインボディのうち前記ワーク支持部よりも前記径方向における内側部分には、前記内側凹部が形成されており、
前記メインボディのうち前記径方向において前記内側凹部の内側に隣接する部分には、前記内側凹部に対して、前記軸線方向における前記第2端部側に円柱状に凹む柱状凹部(30)が形成されており、
前記サブボディは、
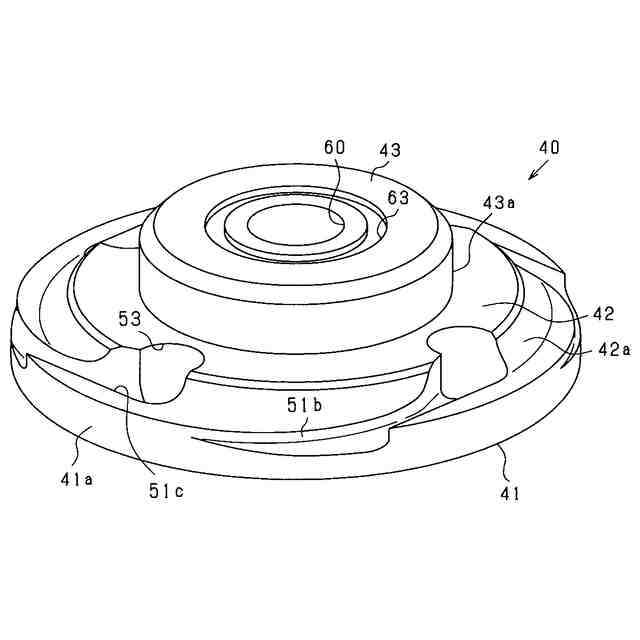
前記中心軸線を中心として前記径方向の外側に延びる円板状をなす円板部(41)と、
前記円板部の中央部から前記軸線方向に延びるとともに、前記径方向の寸法が前記円板部の前記径方向の寸法よりも小さい大径部(42)と、
前記大径部の中央部から前記軸線方向に延びるとともに外形が円柱状をなし、前記径方向の寸法が前記大径部の前記径方向の寸法よりも小さい小径円柱部(43)と、
を有し、
前記柱状凹部の底部(31)に前記小径円柱部の前記軸線方向の端部が当接するとともに、前記大径部の外周面が前記柱状凹部の内周面に当接し、
前記柱状凹部、前記小径円柱部及び前記大径部で囲まれた円環状の空間が、前記供給通路部とされており、
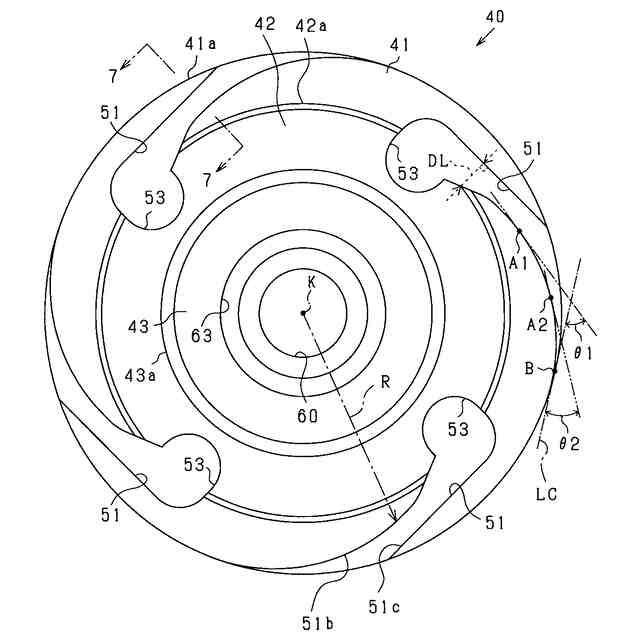
前記円板部には、前記供給通路部側から前記円板部の側周面(41a)まで延びる溝部(51)が形成されており、
前記溝部は、前記軸線方向からみて前記径方向と交差する方向へ延びており、
前記溝部において前記径方向の内側の壁面(51b)は、前記気体通路部の出口側にいくほど曲率半径(R)が徐々に大きくなるような滑らかな曲面であり、
前記溝部及び前記メインボディによって前記気体通路部が形成されている、請求項2に記載の非接触支持装置。
【請求項6】
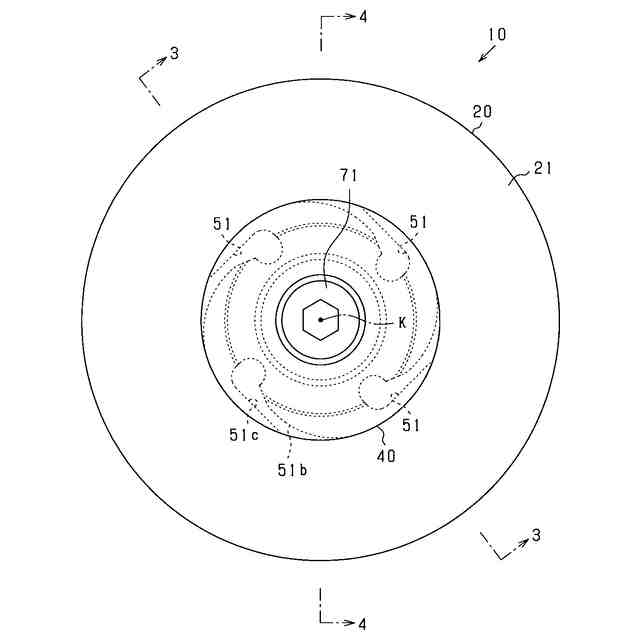
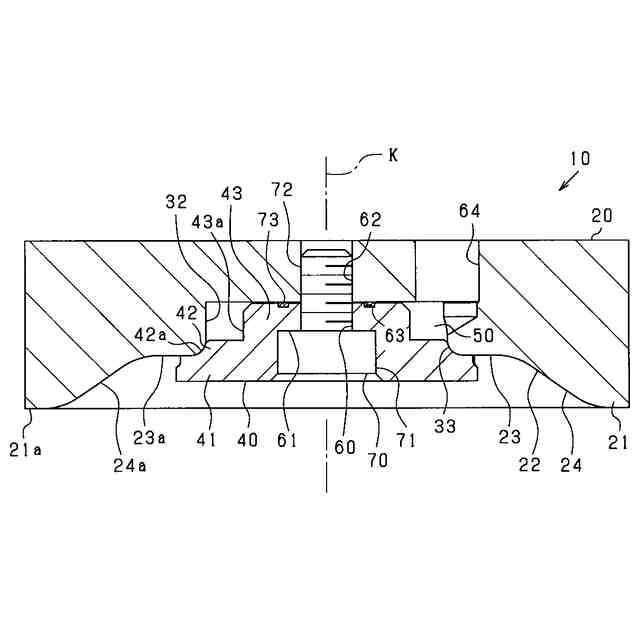
前記サブボディの前記径方向の中央部には、前記円板部、前記大径部及び前記小径円柱部を前記軸線方向に貫通するボルト挿通孔(60)が形成されており、
前記サブボディのうち、前記円板部側の前記ボルト挿通孔の周縁部には、ボルト(70)の頭部(71)が当接する座面(61)が形成されており、
前記メインボディのうち前記サブボディと前記軸線方向に対向する部分における前記径方向の中央部には、前記ボルトの軸部(72)の雄ねじがねじ込まれる雌ねじ孔(62)が形成されており、
前記ボルトの頭部が前記座面に当接した状態で、前記ボルトの軸部の雄ねじが前記雌ねじ孔にねじ込まれている、請求項5に記載の非接触支持装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、非接触支持装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、例えば特許文献1に記載されているように、エアーの流れによって発生する負圧を利用してワークを非接触で支持するサイクロン型の非接触支持装置が知られている。詳しくは、非接触支持装置からワークに対してエアーを噴出させながら非接触支持装置をワークに近づけると、非接触支持装置とワークとの間に高速でエアーが流れる。これにより、非接触支持装置とワークとの間が負圧状態となり、ワークにリフト力が作用する。その結果、非接触支持装置に非接触の状態でワークが支持される。
【先行技術文献】
【特許文献】
【0003】
特開2008-87910号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ワークのリフト力を増加させる技術については、未だ改善の余地がある。
【課題を解決するための手段】
【0005】
本開示は、ワークのリフト力を増加させることができる非接触支持装置を提供することを主たる目的とする。
【0006】
本開示は、ワークに対して気体を噴出することにより前記ワークを非接触状態で支持する非接触支持装置において、
中心軸線が延びる軸線方向、及び前記軸線方向と直交する径方向に延びるボディを備え、
前記ボディの前記軸線方向における第1端部には、前記中心軸線を中心として環状をなすとともに、前記ワークに対向するワーク支持部が形成されており、
前記ボディのうち前記ワーク支持部よりも前記径方向における内側部分には、前記ワーク支持部に対して、前記ボディの前記軸線方向における第2端部側に凹む内側凹部が形成されており、
前記ボディのうち、前記軸線方向において前記内側凹部の底部よりも前記第2端部側には、気体が供給される供給通路部が形成されており、
前記ボディには、前記供給通路部と前記内側凹部の内周側とに連通され、前記内側凹部の内周側において旋回流を発生させるべく、前記軸線方向からみて前記径方向と交差する方向へ延びて前記内側凹部の内周面に対して鋭角となる方向へ気体を噴射する気体通路部が形成されており、
前記気体通路部は、前記鋭角となる角度が小さくなる方向へ湾曲して延びている。
【0007】
本開示において、供給通路部に供給された気体は、ボディに形成された気体通路部を介して内側凹部に噴出する。気体を噴出させた状態でボディのワーク支持部をワークに近づけると、ワーク支持部とワークとの間に高速で気体が流れる。これにより、非接触支持装置とワークとの間が負圧状態となり、ワークにリフト力が作用する。リフト力を増加させるためには、内側凹部に噴出した気体の旋回流の速さを高めて内側凹部とワークとの間の圧力をより低くする必要がある。
【0008】
本開示において、気体通路部は、軸線方向からみて径方向と交差する方向へ延びて内側凹部の内周面に対して鋭角となる方向へ気体を噴射し、上記鋭角となる角度が小さくなる方向へ湾曲して延びている。これにより、気体通路部から内側凹部に噴出した気体を、内側凹部の内周面に沿わせるように流すことができ、内側凹部における気体の旋回流の速さを高めることができる。その結果、内側凹部とワークとの間の圧力をより低下させることができ、ワークのリフト力を増加させることができる。
【図面の簡単な説明】
【0009】
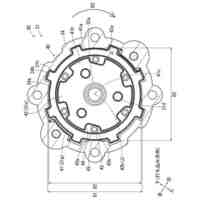
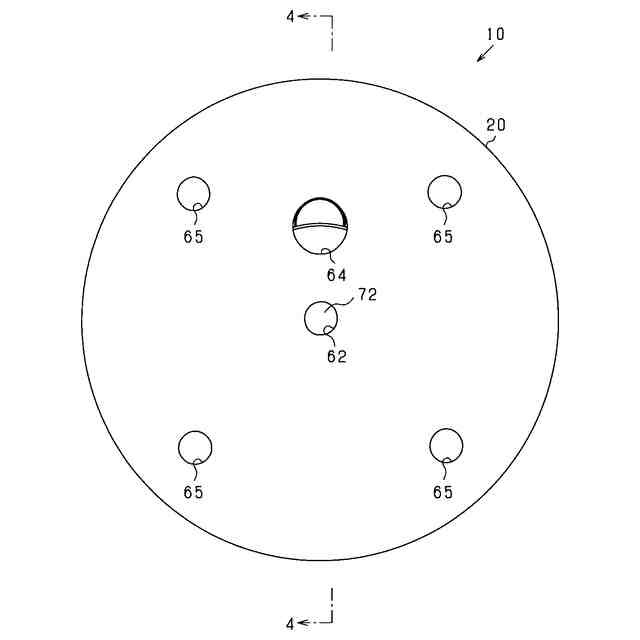
一実施形態に係る非接触支持装置の底面図。
非接触支持装置の平面図。
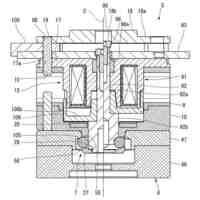
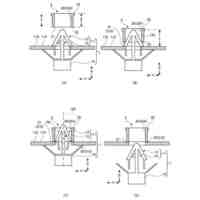
図1の3-3線断面図。
図1の4-4線断面図。
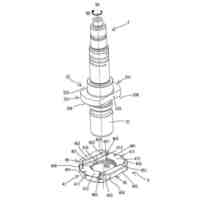
サブボディの平面図。
サブボディの斜視図。
図5の7-7線断面図。
気体通路部から噴出するエアーの流通態様の計算結果を示す図。
比較例に係るエアーの流通態様の計算結果を示す図。
比較例に対する一実施形態のリフト力増加効果を示す計算結果。
【発明を実施するための形態】
【0010】
以下、本開示に係る非接触支持装置を具体化した一実施形態について、図面を参照しながら説明する。本実施形態の非接触支持装置10は、サイクロンタイプの非接触支持装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
11日前
株式会社ジャノメ
ロボット
今日
個人
ペグハンマおよびペグハンマ用部品
4日前
株式会社ダイヘン
搬送装置
4日前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
26日前
住友重機械工業株式会社
支援装置
4日前
住友重機械工業株式会社
支援装置
4日前
株式会社スター精機
産業用ロボット
1か月前
アピュアン株式会社
衝撃工具
6日前
ホシデン株式会社
分解用治具
4日前
オークラ輸送機株式会社
ハンド装置
19日前
株式会社リコー
多関節ロボット
4日前
川崎重工業株式会社
ロボットシステム
20日前
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
今日
工機ホールディングス株式会社
作業機
今日
株式会社ジャノメ
ロボット
28日前
SMC株式会社
ベルヌーイグリッパ
今日
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
セイコーエプソン株式会社
ロボット
1か月前
セイコーエプソン株式会社
ロボット
14日前
小倉クラッチ株式会社
ロボット用ツール交換装置
1か月前
株式会社マキタ
電動工具
18日前
株式会社マキタ
回転工具
21日前
SMC株式会社
コンプライアンスユニット
25日前
個人
工具、工具セット、部材取外し方法
14日前
オムロン株式会社
ロボット
1か月前
オムロン株式会社
ロボット
1か月前
オムロン株式会社
撮影システム
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ