TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096215
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2024216388
出願日
2024-12-11
発明の名称
グローブボックスの密閉筐体内に収容されるエフェクタに封止状態で接続されるマニピュレータアームを挿入するための保護シース、および関連するグローブボックス
出願人
コミッサリア ア レネルジー アトミーク エ オ ゼネルジ ザルタナテイヴ
,
ゲティンゲ ライフ サイエンス フランス
代理人
個人
,
個人
,
個人
主分類
B25J
21/02 20060101AFI20250619BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】グローブボックス内へのマニピュレータアームの封止挿入のための保護シースを改善すること。
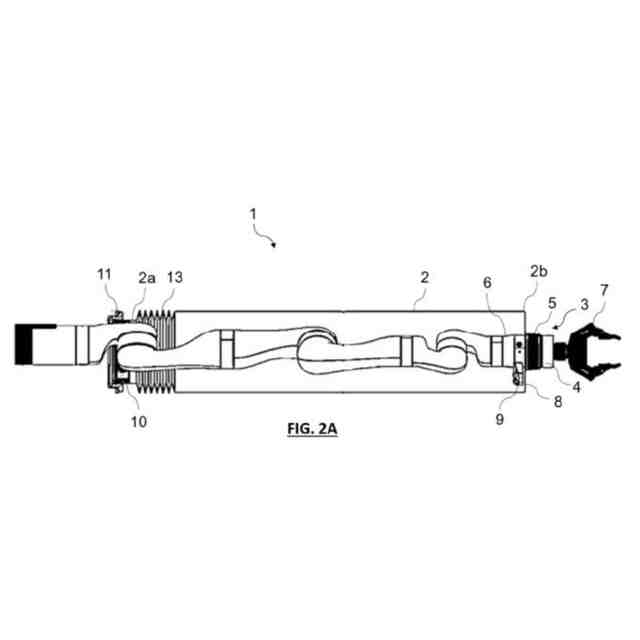
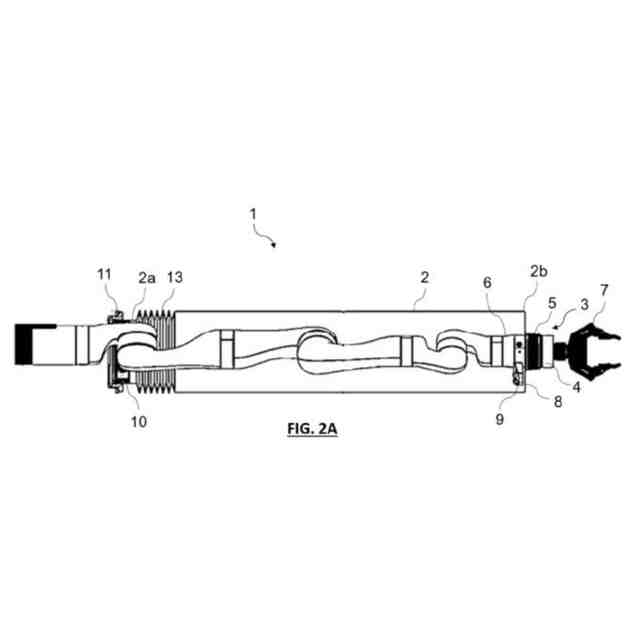
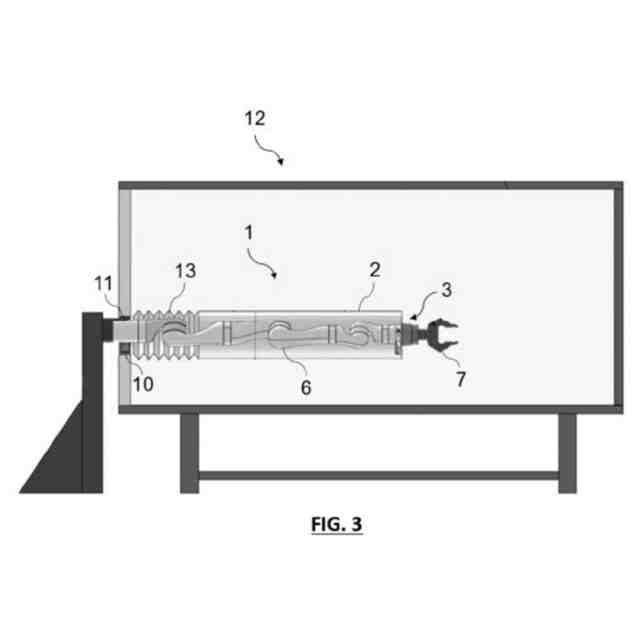
【解決手段】グローブボックスの密閉筐体内に収容されるエフェクタに封止状態で接続されるマニピュレータアームを挿入するための保護シース、および関連グローブボックスを提供する。本発明は、実質的に、保護シース内に係合されるマニピュレータアームを、グローブボックスの密閉筐体内に収容されるエフェクタ(7)へ除去可能に固定し、接続するための封止継手(4)を含む、グローブボックス(12)内へマニピュレータアーム(6)を挿入するための保護シース(1)から成る。
【選択図】図2A
特許請求の範囲
【請求項1】
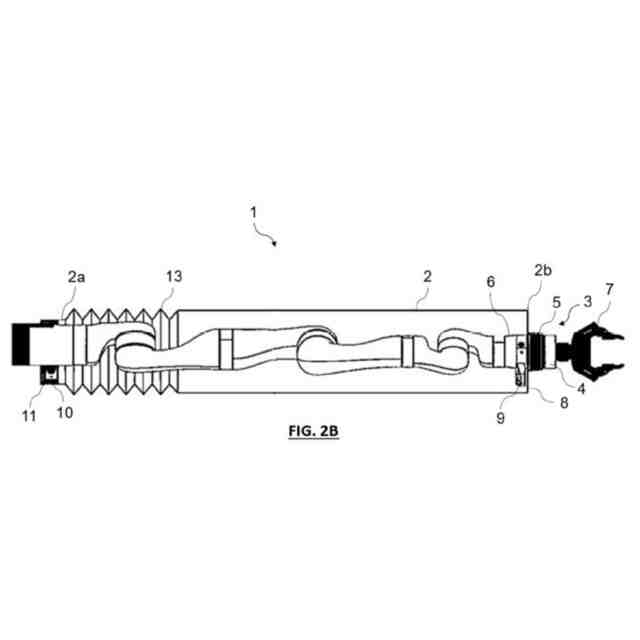
グローブボックス(12)内へマニピュレータアーム(6)を挿入するための保護シース(1)であって、
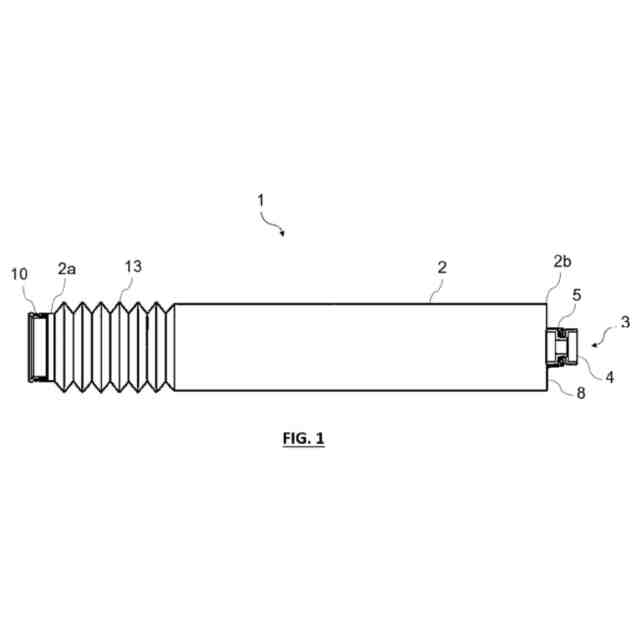
- 可撓性密閉スリーブ(2)と、
- 前記スリーブの開端部(2a)上に封止状態で取り付けられる支持リング(10)であり、前記スリーブを前記グローブボックスの筐体リング(11)に封止状態で固定するように設計されている、支持リング(10)と、
- 前記開端部の反対側の、前記スリーブの端部(2b)を、封止状態で閉鎖する末端部(3)であり、
・前記スリーブに対して固定される末端部リング(5)、
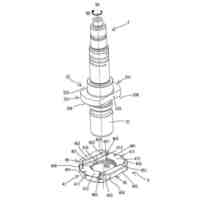
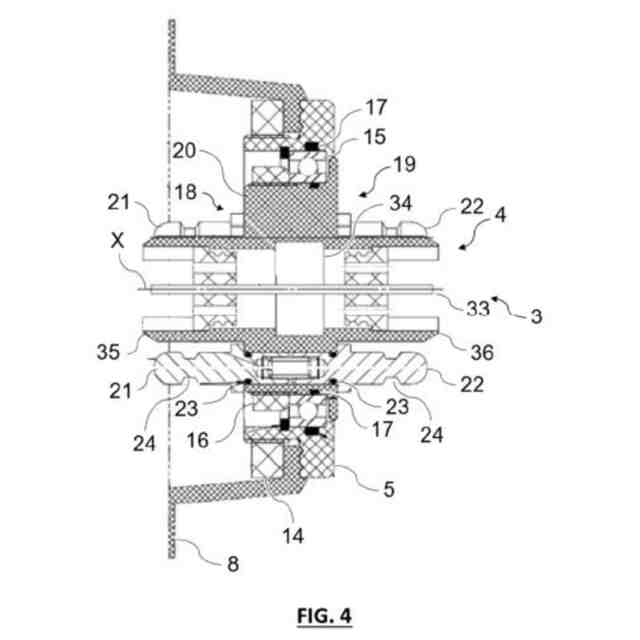
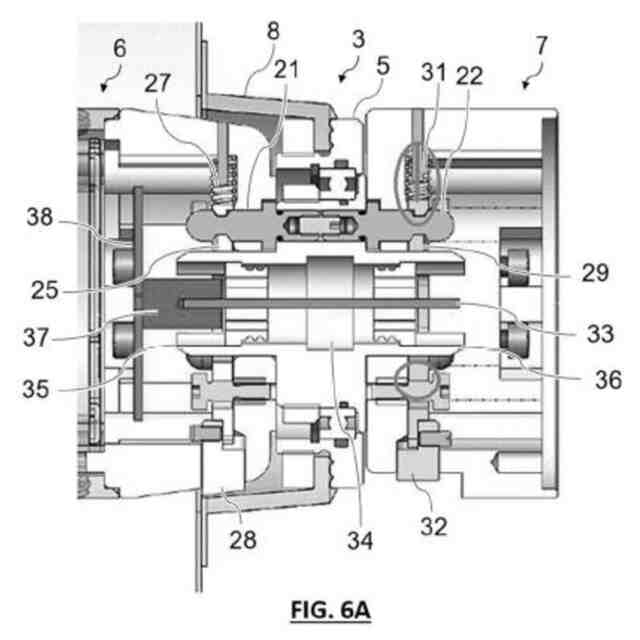
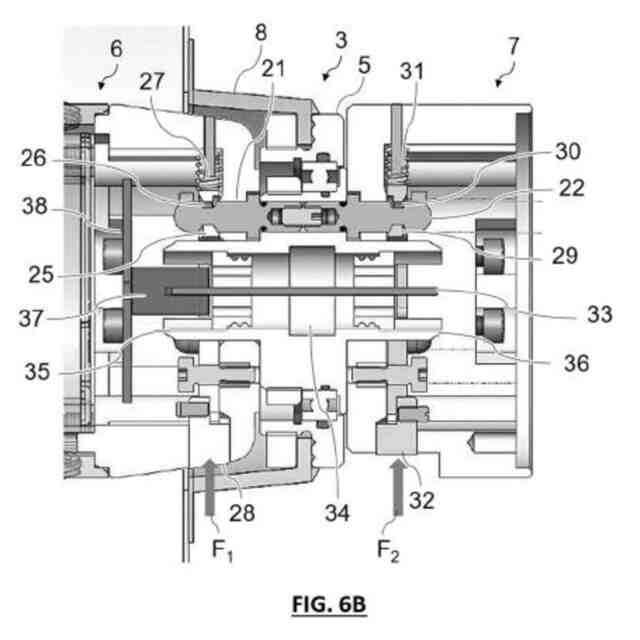
・前記スリーブ内に収容されており、前記マニピュレータアームの端部に除去可能に固定されるように構成されている内面(18)、および前記スリーブの外側に配置されており、エフェクタ(7)に除去可能に固定されるように構成されている外面(19)、を含む、前記末端部リング内へ嵌合され、前記末端部リングの中心軸(X)を中心にして無限に回転可能な継手(4)、
を含む、末端部(3)と、
を含む、保護シース(1)。
続きを表示(約 980 文字)
【請求項2】
前記スリーブのその開端部における一部が、ベローズ(13)である、請求項1に記載の保護シース。
【請求項3】
前記スリーブは、その長さの少なくとも一部に亘って、好ましくはその全長に亘って、半透明である、請求項1または2に記載の保護シース。
【請求項4】
前記スリーブは、ポリウレタンまたはポリ塩化ビニルで作製されている、請求項1から3のいずれか一項に記載の保護シース。
【請求項5】
前記末端部は、前記スリーブに封止状態で固定される外周と、前記末端部リングに封止状態で固定される内周と、を備えた、剛性の透明なフランジ(8)を含む、請求項1から4のいずれか一項に記載の保護シース。
【請求項6】
前記スリーブは、その閉端部に円錐台状部分(45)を含み、前記末端部リングは、前記円錐台状部分の最上部に直接固定される、請求項1から4のいずれか一項に記載の保護シース。
【請求項7】
前記スリーブの2つの部分(43、44)を互いに封止状態で接合する少なくとも1つの回転継手(42)を含み、前記2つの部分は、前記スリーブの長手方向軸を中心にして、互いに対して無限に回転可能である、請求項1から6のいずれか一項に記載の保護シース。
【請求項8】
前記継手は、前記内面から突出しており、前記マニピュレータアームを前記継手に固定するために、前記マニピュレータアームの係止板(25)内へ切り込まれているスロット(26)内へ挿入されることが意図されている内側ピン(21)を含む、請求項1から7のいずれか一項に記載の保護シース。
【請求項9】
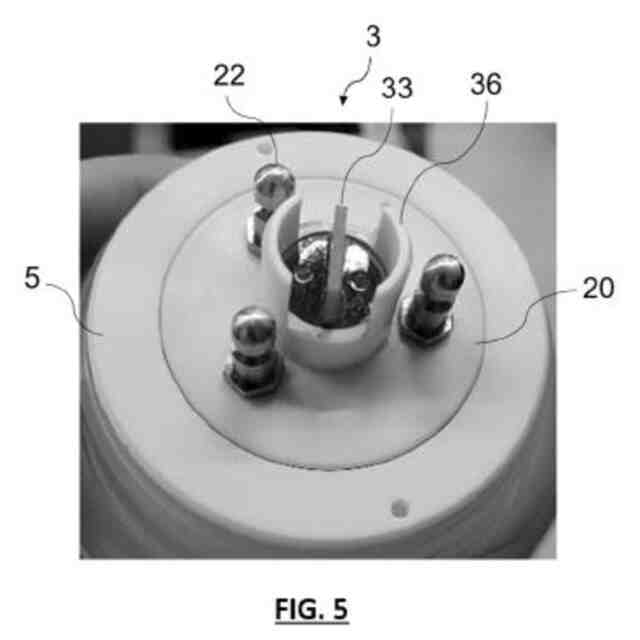
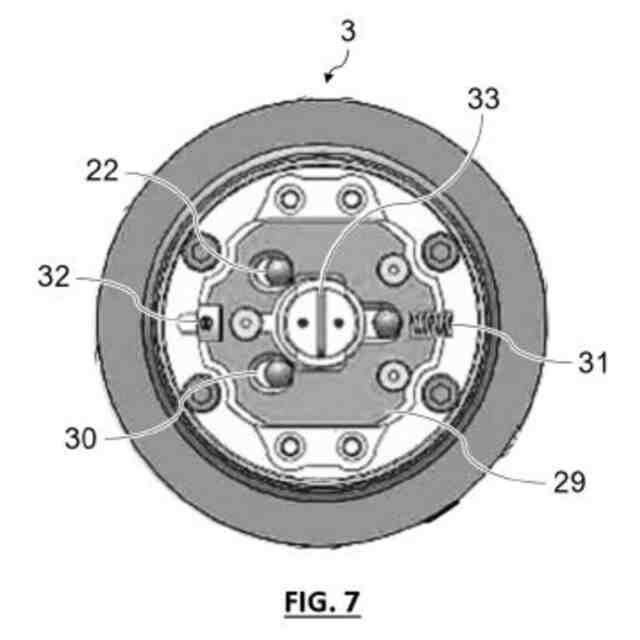
前記継手は、前記外面から突出しており、前記エフェクタを前記継手に固定するために、前記エフェクタの係止板(29)内へ切り込まれているスロット(30)内へ挿入されることが意図されている外側ピン(22)を含む、請求項1から8のいずれか一項に記載の保護シース。
【請求項10】
前記継手は、前記マニピュレータアームを前記エフェクタに電気的に接続するために、前記内面から前記外面へ延在するコネクタ(33)を含む、請求項1から9のいずれか一項に記載の保護シース。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、グローブボックスの分野に関し、より詳細には、グローブボックスの密閉筐体内に含有されている要素を操作するための、グローブボックス内へのアームの封止挿入のための保護シースに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
グローブボックスは密閉筐体であり、その壁のうちの少なくとも1つは透明であり、該密閉筐体は、制御された雰囲気中で物質および物体を操作するために設計されている。グローブボックスは、操作される該物質または該物体が人に有害であるかまたは汚染され易い、例えば、原子力、化学、医薬品および医療の分野の場合に、特に有利である。
【0003】
グローブボックスは、グローブボックス内に存在する製品または材料にアクセスするために、その壁のうちの1つに形成されており、可撓性スリーブが封止状態で取り付けられることが意図されている少なくとも1つの貫通開口部を含む。該可撓性スリーブは、密閉防壁を形成することによって、制御された雰囲気が筐体内で維持されることを確実にしており、この密閉防壁を通じて、筐体内に含有されている要素が操作され得る。
【0004】
通常、可撓性スリーブは、オペレータの手を受容するためのグローブである。しかし、グローブによる、グローブボックス内に含有されている要素の操作は、オペレータにとって危険なままである。
【0005】
具体的には、グローブボックスの封止を破り、したがってそこに含有されている有害要素にオペレータを暴露する可能性がある事故のリスクが存在する。詳細には、操作中にグローブが穿孔されるリスクが存在する。
【0006】
グローブボックスはアルファ線およびベータ線に対して遮光性であるが、その一部では、ガンマ線がグローブを通過する可能性がある。したがって、オペレータによる放射性要素の操作のために、グローブを可撓性スリーブとして使用するグローブボックスが、最適な保護を有しない。
【0007】
さらに、オペレータによる、グローブボックス内に含有されている要素を操作するあるタスク、例えば予防保全および清掃のタスク、が、多くの時間と労力を要する。オペレータによるこれらのタスクの実行が、より高い付加価値を有する他の作業のための使用可能な労働時間を減少させる。
【0008】
上述の欠点のうちの少なくともいくつかを克服するために、マニピュレータアーム、例えば遠隔操作のロボットアームまたはスレーブアームが、グローブボックス内に含有されている要素の操作のために使用され得る。
【0009】
しかし、標準的なグローブボックスが、それらの筐体の完全に内部にマニピュレータアームを設置するように設計されていない。詳細には、グローブボックスの内部は、一般に、窮屈であり、多くの物体で雑然としている可能性がある。さらに、マニピュレータアームが、(詳細には腐食性の、埃っぽい、および/または放射能のある可能性がある)グローブボックスの密閉された雰囲気に耐えるのに適していない可能性がある。さらに、グローブボックスの完全に内部に配置されているマニピュレータアームのメンテナンスは非常に複雑であることが判明するであろうと考えられる。
【0010】
したがって、マニピュレータアームをグローブボックスの外側に配置すること、およびマニピュレータアームを可撓性スリーブ内に挿入することが好ましく、可撓性スリーブは、適切な場合、グローブボックス内の要素を操作するための、マニピュレータアームを保護するための保護シースである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
19日前
株式会社ジャノメ
ロボット
8日前
株式会社ダイヘン
搬送装置
12日前
個人
ペグハンマおよびペグハンマ用部品
12日前
住友重機械工業株式会社
教示装置
5日前
川崎重工業株式会社
ロボット
6日前
工機ホールディングス株式会社
作業機
5日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
5日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
12日前
住友重機械工業株式会社
支援装置
12日前
オークラ輸送機株式会社
ハンド装置
27日前
株式会社マキタ
電気機器
6日前
株式会社スター精機
産業用ロボット
1か月前
ホシデン株式会社
分解用治具
12日前
アピュアン株式会社
衝撃工具
14日前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
8日前
川崎重工業株式会社
ロボットシステム
28日前
工機ホールディングス株式会社
作業機
8日前
株式会社リコー
多関節ロボット
12日前
SMC株式会社
ベルヌーイグリッパ
8日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社ジャノメ
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
セイコーエプソン株式会社
ロボット
22日前
株式会社マキタ
回転工具
29日前
株式会社マキタ
電動工具
26日前
工機ホールディングス株式会社
集塵装置及び作業機
5日前
住友重機械工業株式会社
減速装置選定支援装置
12日前
株式会社永木精機
締結用回動体
5日前
オムロン株式会社
ロボット
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ