TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025096208
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2024215356
出願日
2024-12-10
発明の名称
二重の密封壁部を形成しながらグローブボックスの中に含有されているアイテムを操作するためのデバイスおよび関連のグローブボックス
出願人
コミッサリア ア レネルジー アトミーク エ オ ゼネルジ ザルタナテイヴ
代理人
個人
,
個人
,
個人
主分類
B25J
21/00 20060101AFI20250619BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】二重の密封壁部を形成しながら、グローブボックスの中に含有されているアイテムを操作するためのデバイス、および、関連のグローブボックスを提供すること。
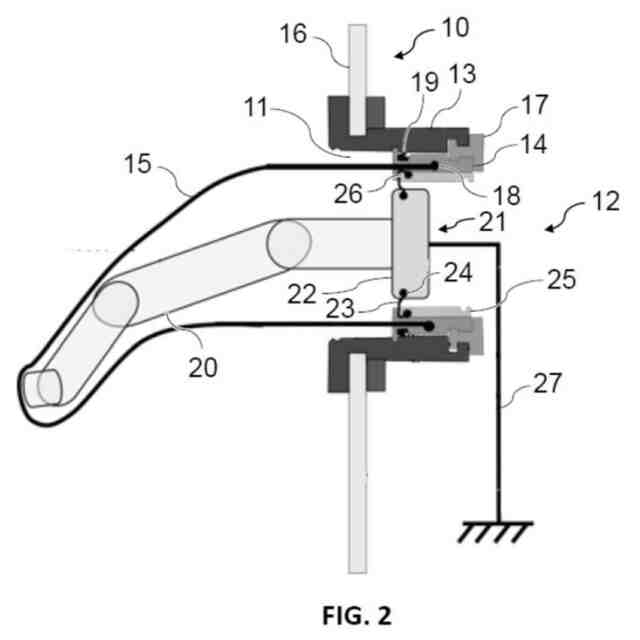
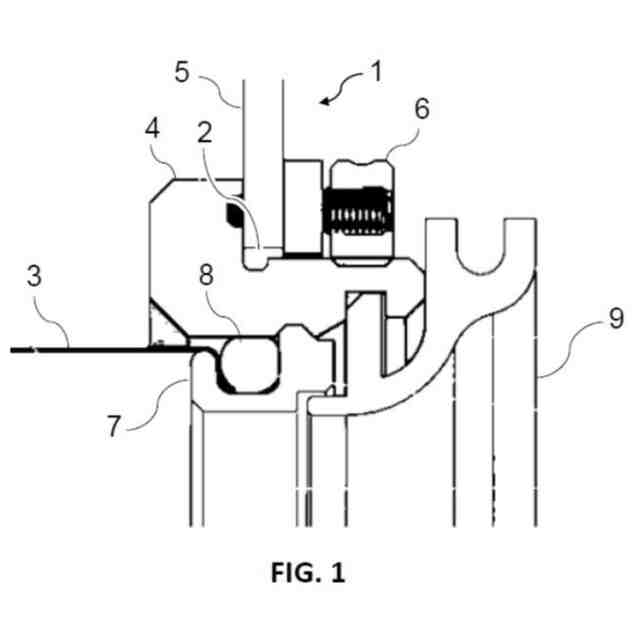
【解決手段】本発明は、本質的に、ロボットアームまたはスレーブアームがグローブボックス10の中で保護スリーブ15の中へ挿入されるときに、保護スリーブ15の開放端部を密封することを提案することにある。
【選択図】図2
特許請求の範囲
【請求項1】
グローブボックス(10)の中に含有されているアイテムを操作するためのデバイス(12)であって、前記デバイス(12)は、
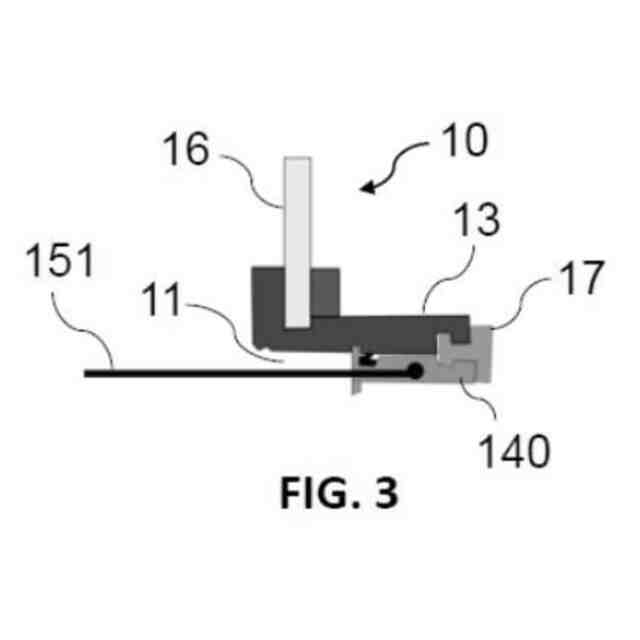
- 前記グローブボックスの壁部(16)の中に形成された貫通開口部(11)の縁部に固定されるように適合されているエンクロージャーリング(13)と、
- 開放端部を含む密封された保護スリーブ(15)と、
- 支持リング(14)であって、密封された前記保護スリーブが、前記支持リング(14)の上に密封して装着され、前記支持リングは、前記保護スリーブを前記エンクロージャーリングに密封して固定するように前記エンクロージャーリングの中へフィットされるように適合されている、支持リング(14)と、
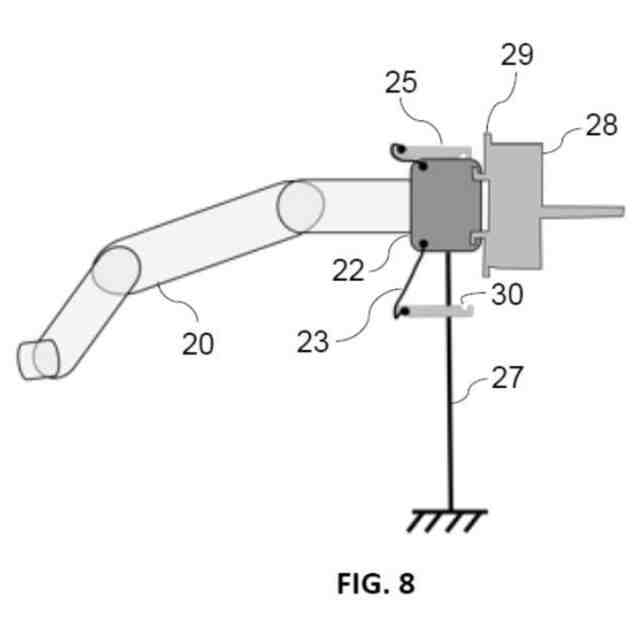
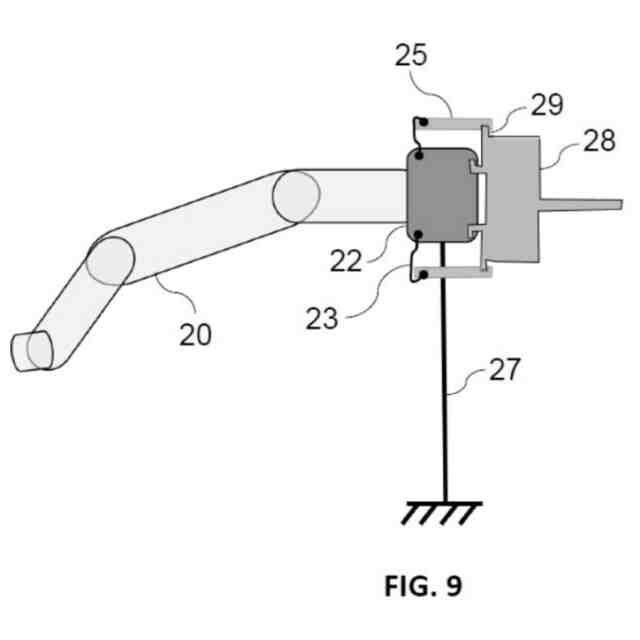
- プラグ(21)を含むロボットアーム(20)または遠隔マニピュレーターのスレーブアームであって、前記ロボットアームまたは前記スレーブアームは、前記保護スリーブの前記開放端部を密封して塞ぐ前記プラグとともに前記保護スリーブの中へ挿入されるように適合されている、ロボットアーム(20)または遠隔マニピュレーターのスレーブアームと、
を含む、デバイス(12)。
続きを表示(約 1,300 文字)
【請求項2】
前記支持リングが前記エンクロージャーリングの中へフィットされるときに前記支持リングをロックするための固定化リング(17)を含む、請求項1に記載のデバイス。
【請求項3】
前記ロボットアームまたは前記スレーブアームは、前記ロボットアームまたは前記スレーブアームによって働かされる力を吸収するために支持体(27)の上に装着されており、前記支持体は、地面に、壁部などのような構造体の仕切りに、または天井に固定されるように適合されている、請求項1または2に記載のデバイス。
【請求項4】
前記保護スリーブおよび前記プラグによって境界を定められた密封体積の中の圧力の変化を検出するために、前記プラグによって塞がれた前記保護スリーブの中に配置されるように設計されている圧力センサーを含む、請求項1から3のいずれか一項に記載のデバイス。
【請求項5】
前記プラグは、ベース(22)と、前記ベースの周りに密封して固定された密封カラー(23)と、前記カラーを前記支持リングに密封して固定するための手段と、を含む、請求項1から4のいずれか一項に記載のデバイス。
【請求項6】
前記カラーは、可撓性ポリマー、好ましくは、ポリウレタンまたはポリ塩化ビニルから作製されている、請求項5に記載のデバイス。
【請求項7】
前記カラーは、前記ベースの中に形成された溝部の中に収容されて圧縮されている内側ビード(24)を含む、請求項5または6に記載のデバイス。
【請求項8】
前記固定手段は、支持フープ(25)であり、前記カラーが、前記支持フープ(25)の上に装着されており、前記支持フープは、前記カラーを前記支持リングに密封して固定するように前記支持リングの中へフィットされるように適合されている、請求項5から7のいずれか一項に記載のデバイス。
【請求項9】
前記支持フープは、前記カラーと前記支持リングとの間にシールを提供するように、前記支持リングに対して前記カラーを圧縮するように適合されており、前記カラーは、好ましくは、外側ビード(26)を含み、前記外側ビード(26)は、前記支持フープの中に形成された溝部の中に収容されており、前記支持リングに対して圧縮されるように適合されている、請求項8に記載のデバイス。
【請求項10】
グローブボックス(10)であって、前記グローブボックス(10)は、
- その壁部(16)のうちの1つの中に形成された貫通開口部(11)と、
- 請求項1から9のいずれか一項に記載のデバイス(12)であって、前記エンクロージャーリング(13)は、前記貫通開口部の縁部に固定されており、前記支持リング(14)は、前記エンクロージャーリングの中へフィットされており、したがって、密封された前記保護スリーブ(15)を前記エンクロージャーリングに密封して固定している、デバイス(12)と、
を含む、グローブボックス(10)。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、グローブボックスの分野に関し、より具体的には、グローブボックスの中に含有されているアイテムを操作するためのデバイスに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
グローブボックスは、少なくとも1つの透明な壁部を有する密封エンクロージャーであり、密封エンクロージャーは、制御された雰囲気の中での物質および物体の操作に適合されている。グローブボックスは、たとえば、原子力、化学、製薬、および医療の分野の場合のように、操作されることとなる物質または物体が人体に有害でありまたは汚染を受けるときに、とりわけ有用である。
【0003】
グローブボックスは、グローブボックスの内側に存在する製品および材料にアクセスする目的のために、その壁部のうちの1つの中に形成された少なくとも1つの貫通開口部を含み、可撓性スリーブが、その中に密封して装着されるように設計されている。可撓性スリーブは、密封バリアを形成することによって、制御された雰囲気がエンクロージャーの中に維持されることを確保し、密封バリアを通して、エンクロージャーの中に含有されているアイテムが操作されることが可能である。
【0004】
可撓性スリーブは、通常、オペレーターの手を収容するためのグローブである。
【0005】
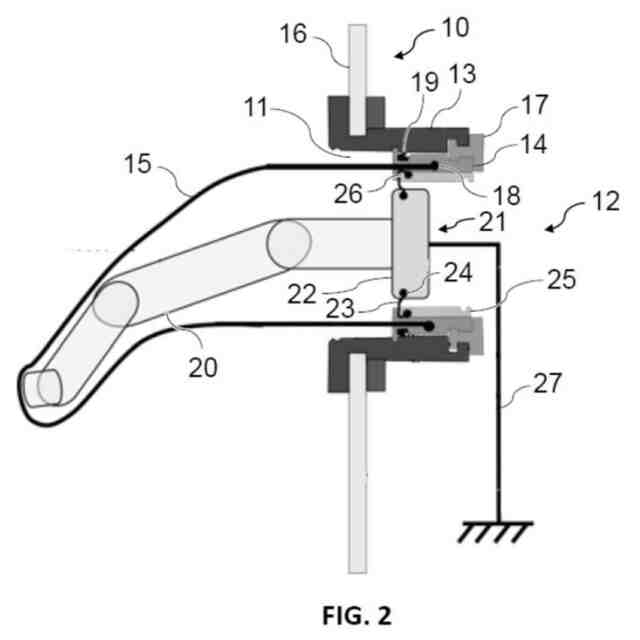
図1は、貫通開口部2を含むグローブボックス1の一部を示しており、グローブ3が、貫通開口部2の中に密封して装着されている。グローブ3は、スクリューおよびナットシステム6を使用して、クランピングによってエンクロージャーの境界を定める壁部5に固定されたエンクロージャーリング4によって、開口部2の中に装着されている。
【0006】
支持リング7は、エンクロージャーリング4の上に除去可能に装着されている。グローブ3の端部は、ビード8が提供されており、ビード8は、支持リング7とエンクロージャーリング4との間に収容されている。支持リング7は、エンクロージャーリング4に対してビード8を圧縮し、したがって、アッセンブリの密封を確保する。支持リングおよびエンクロージャーリングによってグローブボックスの開口部の中に固定されたグローブも、先行技術から知られており、前記グローブは、ビードを有しておらず、密封は、ガスケットによって確保されている。
【0007】
固定化リング9は、支持リング7がエンクロージャーリング4に対して固定化されることを可能にする。
【0008】
図1に図示されているものなどのようなグローブを使用してグローブボックスの中に含有されているアイテムを操作することは、オペレーターにとって危険なままである。
【0009】
これは、グローブボックスのシールを破壊し、その中に含有されている有害なアイテムにオペレーターを結果的にさらす可能性のある事故のリスクが存在するからである。特に、操作の間にグローブを穿刺するリスクが存在している。
【0010】
グローブボックスは、アルファおよびベータ放射線に対して不透明であるが、ガンマ放射線は、グローブを通して透過されることが可能である。したがって、グローブを可撓性スリーブとして使用するグローブボックスは、オペレーターによる放射性アイテムの操作のための最適な保護を提供しない。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
7日前
日東精工株式会社
電動ドライバ
1か月前
株式会社不二越
ロボット
2か月前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
個人
ペグハンマおよびペグハンマ用部品
今日
株式会社ダイヘン
搬送装置
今日
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
22日前
工機ホールディングス株式会社
作業機
22日前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
22日前
住友重機械工業株式会社
支援装置
今日
川崎重工業株式会社
制動システム
2か月前
住友重機械工業株式会社
ロボット
1か月前
住友重機械工業株式会社
支援装置
今日
株式会社PILLAR
チューブ保持治具
1か月前
株式会社アイエイアイ
グリッパー
1か月前
庄内機械株式会社
釘打装置
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
28日前
オークラ輸送機株式会社
ハンド装置
15日前
アピュアン株式会社
衝撃工具
2日前
ホシデン株式会社
分解用治具
今日
芝浦機械株式会社
双腕ロボット
1か月前
株式会社リコー
多関節ロボット
今日
川崎重工業株式会社
ロボットシステム
16日前
株式会社リコー
多関節ロボット
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社安川電機
ロボット
28日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
28日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































