TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095531
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211592
出願日
2023-12-14
発明の名称
移動制御システム、移動制御方法、及び移動制御プログラム
出願人
日本電気株式会社
代理人
個人
主分類
G05D
1/247 20240101AFI20250619BHJP(制御;調整)
要約
【課題】地上からの基準電波による移動体の誘導を可能とする移動制御システム等を提供する。
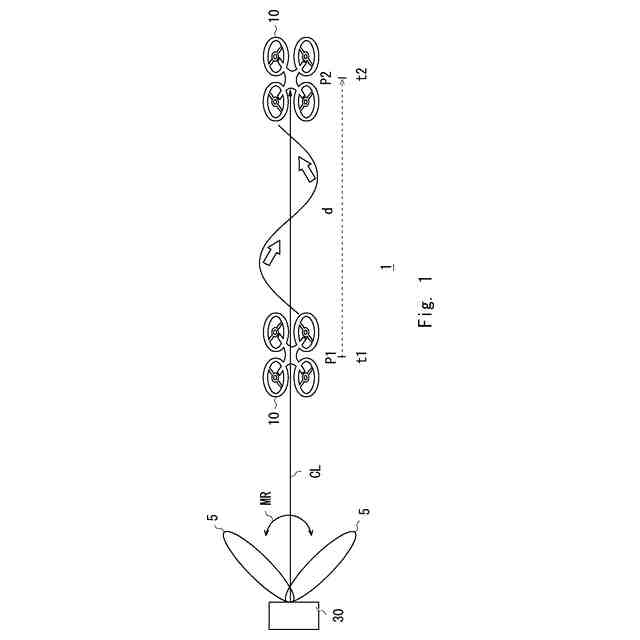
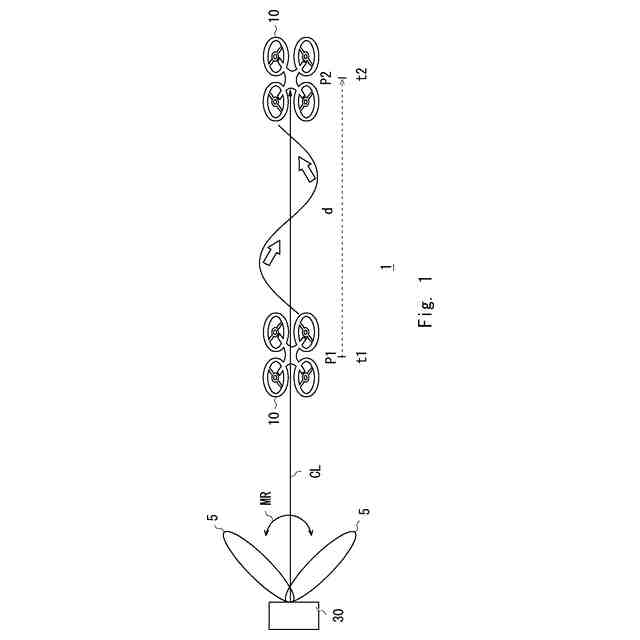
【解決手段】移動制御システムは移動体と、電波を送信するアンテナ機構と、を備える。移動体は、アンテナ機構からの電波を受信する受信機アンテナと、移動体を移動させる駆動機構と、前記移動体を制御する制御部と、アンテナ機構のクロックと同期したクロックと、を備える。アンテナ機構は、指向性のある電波を、所定の可動範囲で、所定の周期で可動させながら送信する。移動体の制御部は、受信機アンテナが受信した電波の電界強度と当該電界強度を受ける周期を測定する測定手段と、測定手段により測定された前記電波の電界強度と前記周期に基づいて、前記電波の前記所定の可動範囲の中心線からの前記移動体のずれ量を取得するずれ量取得手段と、取得した中心線からの移動体のずれ量に基づいて、移動体を可動範囲の中心線上に移動させる駆動制御手段と、を含む。
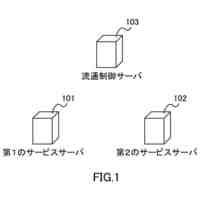
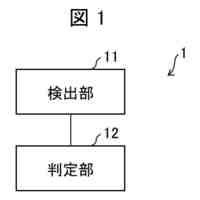
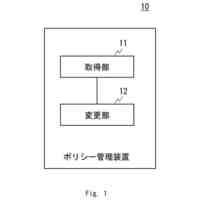
【選択図】図1
特許請求の範囲
【請求項1】
移動体と、電波を送信するアンテナ機構と、を備えた移動制御システムであって、
前記移動体は、
前記アンテナ機構からの電波を受信する受信機アンテナと、
前記移動体を移動させる駆動機構と、
前記移動体を制御する制御部と、
前記アンテナ機構のクロックと同期したクロックと、
を備え、
前記アンテナ機構は、指向性のある電波を、所定の可動範囲で、所定の周期で可動させながら送信し、
前記移動体の前記制御部は、
前記受信機アンテナが受信した電波の電界強度と当該電界強度を受ける周期を測定する測定手段と、
測定された前記電波の電界強度と前記周期に基づいて、前記電波の前記所定の可動範囲の中心線からの前記移動体のずれ量を取得するずれ量取得手段と、
取得した前記中心線からの前記移動体のずれ量に基づいて、前記移動体を前記電波の前記可動範囲の中心線上に移動させる駆動制御手段と、を備える、移動制御システム。
続きを表示(約 2,000 文字)
【請求項2】
前記移動体は、衛星局から測位信号を受信する測位信号受信機を更に備え、
前記移動体の前記制御部は、受信した前記測位信号に基づき、前記移動体の位置を特定する測位手段と、
特定された前記移動体の位置と目的地に基づいて、前記移動体の駆動機構を制御する駆動制御手段と、を更に備える、請求項1に記載の移動制御システム。
【請求項3】
前記測位信号受信機が衛星局から測位信号を受信できる場合には、
前記駆動制御手段は、特定された前記移動体の位置と目的地に基づいて、前記移動体の駆動部を制御し、
前記測位信号受信機が衛星局から測位信号を受信できない場合には、
前記駆動制御手段は、取得した前記中心線からの前記移動体のずれ量に基づいて、前記移動体を前記可動範囲の中心線上に移動させる、請求項2に記載の移動制御システム。
【請求項4】
前記クロックは、原子時計を用いる、請求項1に記載の移動制御システム。
【請求項5】
移動体と、電波を送信するアンテナ機構と、を備えた移動制御システムであって、
前記移動体は、
前記アンテナ機構からの電波を受信する受信機アンテナと、
前記移動体を移動させる駆動機構と、
前記移動体を制御する制御部と、
前記アンテナ機構のクロックと同期したクロックと、
を備えた、移動制御システムの移動制御方法であって、
前記アンテナ機構は、指向性のある電波を、所定の可動範囲で、所定の周期で可動させながら送信し、
前記移動体は、
前記受信機アンテナが受信した電波の電界強度と当該電界強度を受ける周期を測定し、
測定された前記電波の電界強度と前記周期に基づいて、前記電波の前記所定の可動範囲の中心線からの前記移動体のずれ量を取得し、
取得した前記中心線からの前記移動体のずれ量に基づいて、前記移動体を前記電波の前記可動範囲の中心線上に移動させる、移動制御方法。
【請求項6】
前記移動体は、衛星局から測位信号を受信する測位信号受信機を更に備え、
前記移動体は、受信した前記測位信号に基づき、前記移動体の位置を特定し、
特定された前記移動体の位置と目的地に基づいて、前記移動体の駆動機構を制御する、請求項5に記載の移動制御方法。
【請求項7】
前記測位信号受信機が衛星局から測位信号を受信できる場合には、
特定された前記移動体の位置と目的地に基づいて、前記移動体の駆動機構を制御し、
前記測位信号受信機が衛星局から測位信号を受信できない場合には、
取得した前記中心線からの前記移動体のずれ量に基づいて、前記移動体を前記電波の前記可動範囲の中心線上に移動させる、請求項6に記載の移動制御方法。
【請求項8】
アンテナ機構からの電波を受信する受信機アンテナと、
移動体を移動させる駆動機構と、
前記移動体を制御する制御部と、
前記アンテナ機構のクロックと同期したクロックと、
を備えた移動体のための移動制御プログラムであって、
前記アンテナ機構は、指向性のある電波を、所定の可動範囲で、所定の周期で可動させながら送信し、
前記移動体に、
前記受信機アンテナが受信した電波の電界強度と当該電界強度を受ける周期を測定させ、
測定された前記電波の電界強度と前記周期に基づいて、前記電波の前記所定の可動範囲の中心線からの前記移動体のずれ量を取得させ、
取得した前記中心線からの前記移動体のずれ量に基づいて、前記移動体を前記可動範囲の中心線上に移動させることをコンピュータに実行させる、移動制御プログラム。
【請求項9】
前記移動体は、衛星局から測位信号を受信する測位信号受信機を更に備え、
前記移動体に、受信した前記測位信号に基づき、前記移動体の位置を特定させ、
特定された前記移動体の位置と目的地に基づいて、前記移動体の駆動機構を制御させることをコンピュータに実行させる、請求項8に記載の移動制御プログラム。
【請求項10】
前記測位信号受信機が衛星局から測位信号を受信できる場合には、
特定された前記移動体の位置と目的地に基づいて、前記移動体の駆動機構を制御させ、
前記測位信号受信機が衛星局から測位信号を受信できない場合には、
取得した前記中心線からの前記移動体のずれ量に基づいて、前記移動体を前記可動範囲の中心線上に移動させることをコンピュータに実行させる、請求項9に記載の移動制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動制御システム、移動制御方法、及び移動制御プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
フライトコントローラが、GPS受信機にて受信したGPS衛星信号に基づいて自己の現在位置(経度及び緯度)を特定し、当該特定した現在位置と自己に予め設定されている飛行予定ルートとに基づいて、飛行予定ルートを飛行するようにESCを介して各プロペラを制御することが開示されている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2018-147412号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、例えば、ジャミングなどによりGPS信号が受信できない環境においても、移動体の自律移動又は誘導が求められている。
【0005】
本開示は、このような問題点を解決するためになされたものであり、地上からの基準電波による移動体の誘導を可能とする移動制御システム等を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様にかかる移動制御システムは、
移動体と、電波を送信するアンテナ機構と、を備えた移動制御システムであって、
前記移動体は、
前記アンテナ機構からの電波を受信する受信機アンテナと、
前記移動体を移動させる駆動機構と、
前記移動体を制御する制御部と、
前記アンテナ機構のクロックと同期したクロックと、
を備え、
前記アンテナ機構は、指向性のある電波を、所定の可動範囲で、所定の周期で可動させながら送信し、
前記移動体の前記制御部は、
前記受信機アンテナが受信した電波の電界強度と当該電界強度を受ける周期を測定する測定手段と、
測定された前記電波の電界強度と前記周期に基づいて、前記電波の前記所定の可動範囲の中心線からの前記移動体のずれ量を取得するずれ量取得手段と、
取得した前記中心線からの前記移動体のずれ量に基づいて、前記移動体を前記電波の前記可動範囲の中心線上に移動させる駆動制御手段と、を備える。
【0007】
本開示の一態様にかかる移動制御方法は、
移動体と、電波を送信するアンテナ機構と、を備えた移動制御システムであって、
前記移動体は、
前記アンテナ機構からの電波を受信する受信機アンテナと、
前記移動体を移動させる駆動機構と、
前記移動体を制御する制御部と、
前記アンテナ機構のクロックと同期したクロックと、
を備えた、移動制御システムの移動制御方法であって、
前記アンテナ機構は、指向性のある電波を、所定の可動範囲で、所定の周期で可動させながら送信し、
前記移動体は、
前記受信機アンテナが受信した電波の電界強度と当該電界強度を受ける周期を測定し、
測定された前記電波の電界強度と前記周期に基づいて、前記電波の前記所定の可動範囲の中心線からの前記移動体のずれ量を取得し、
取得した前記中心線からの前記移動体のずれ量に基づいて、前記移動体を前記電波の前記可動範囲の中心線上に移動させる。
【0008】
本開示の一態様にかかる移動制御プログラムは、
アンテナ機構からの電波を受信する受信機アンテナと、
移動体を移動させる駆動機構と、
前記移動体を制御する制御部と、
前記アンテナ機構のクロックと同期したクロックと、
を備えた移動体のための移動制御プログラムであって、
前記アンテナ機構は、指向性のある電波を、所定の可動範囲で、所定の周期で可動させながら送信し、
前記移動体に、
前記受信機アンテナが受信した電波の電界強度と当該電界強度を受ける周期を測定させ、
測定された前記電波の電界強度と前記周期に基づいて、前記電波の前記所定の可動範囲の中心線からの前記移動体のずれ量を取得させ、
取得した前記中心線からの前記移動体のずれ量に基づいて、前記移動体を前記可動範囲の中心線上に移動させることをコンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、地上からの基準電波による移動体の誘導を可能とする移動制御システム等を提供することができる。
【図面の簡単な説明】
【0010】
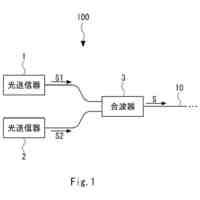
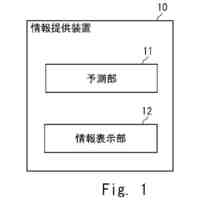
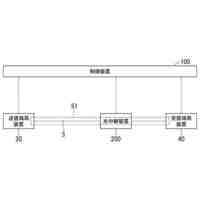
本開示にかかる移動制御システムを説明する図である。
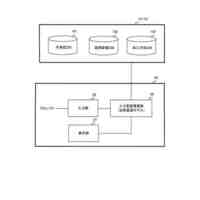
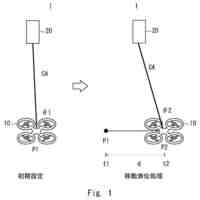
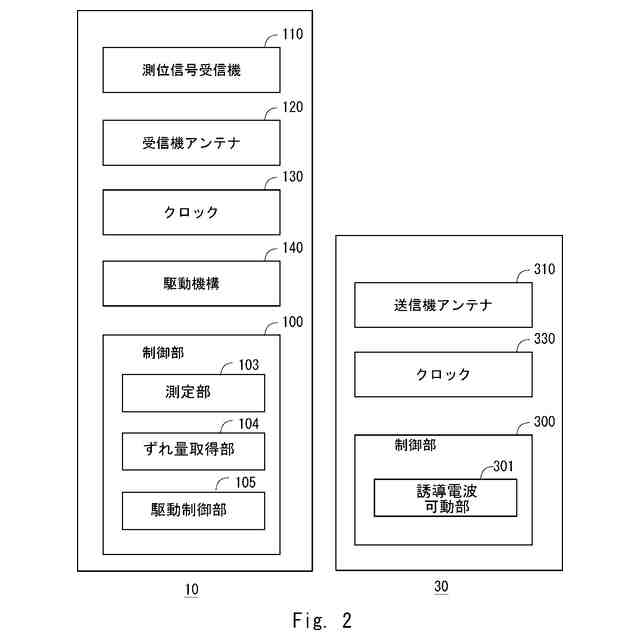
本開示にかかる移動制御システムを構成する、移動体とアンテナ機構の構成例を説明する図である。
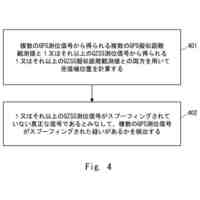
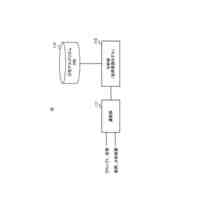
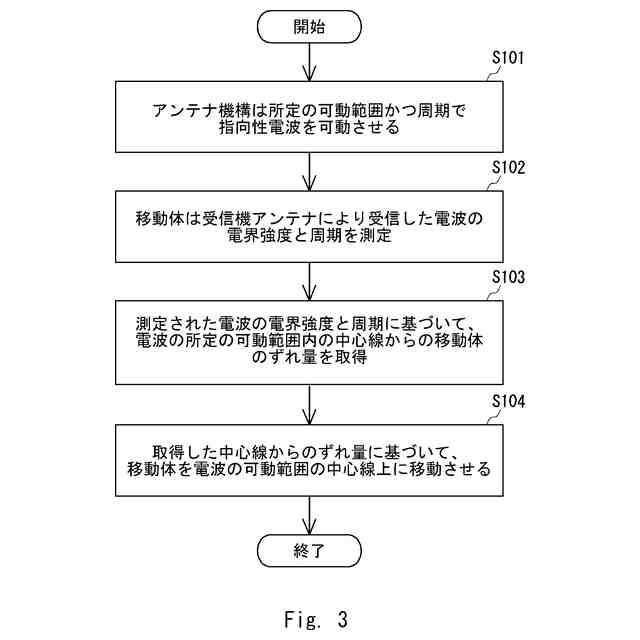
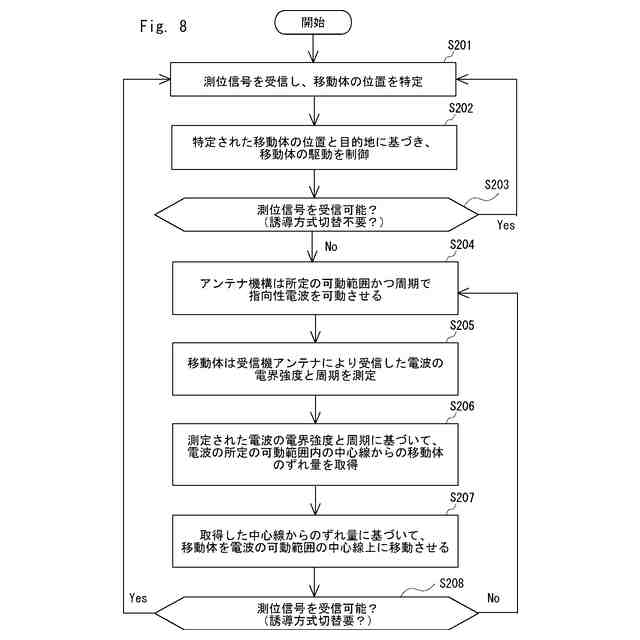
本開示にかかる移動制御方法を説明するフローチャートである。
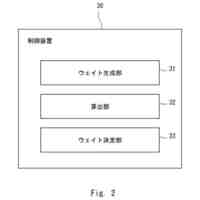
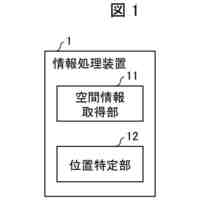
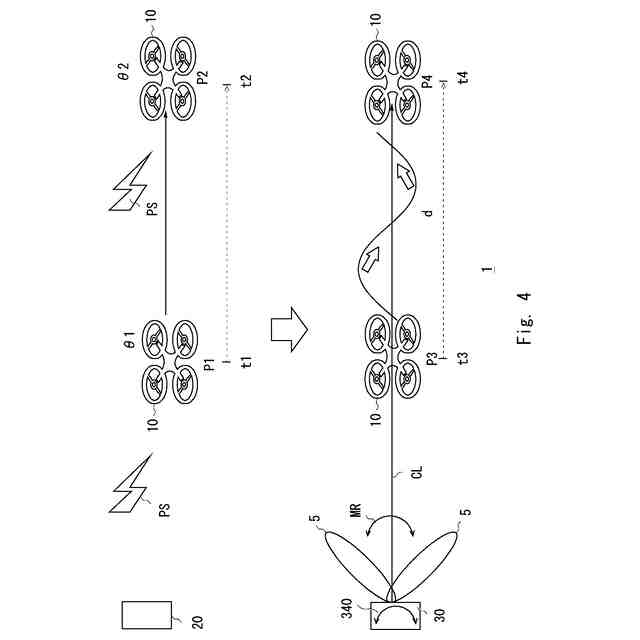
本開示にかかる移動制御システムを説明する図である。
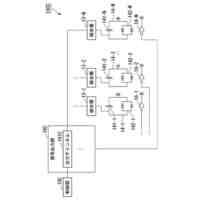
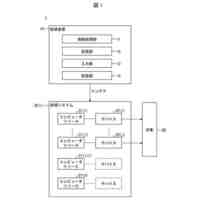
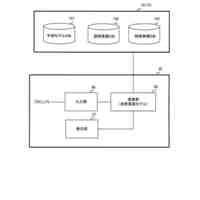
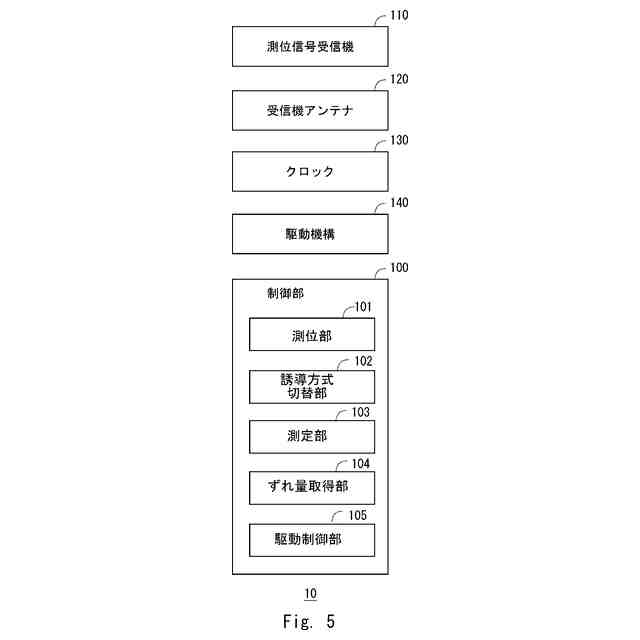
本開示にかかる移動体の構成例を説明する図である。
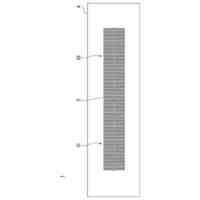
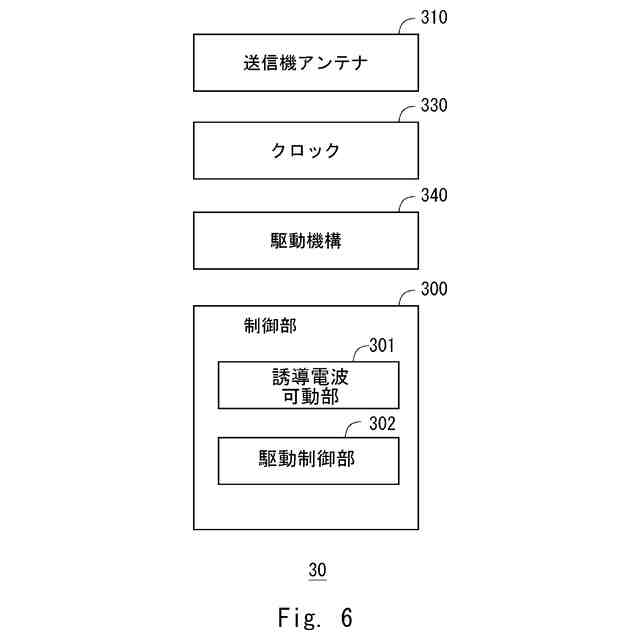
本開示にかかるアンテナ機構の構成例を説明する図である。
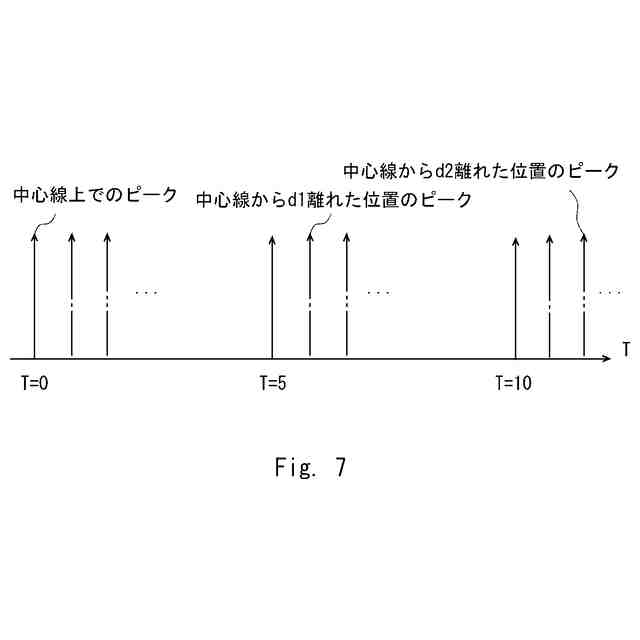
本開示にかかる中心線上の、又は中心線から所定距離だけずれた移動体が受信する電波の電界強度のピーク及び周期を説明する図である。
本開示にかかる移動制御方法を説明するフローチャートである。
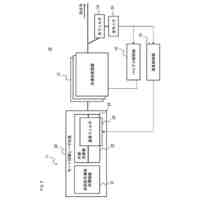
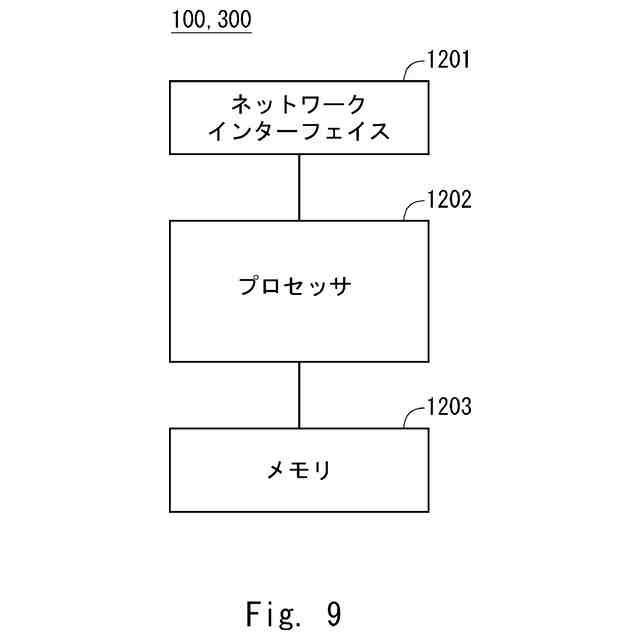
本開示にかかる制御部等のハードウェア構成を説明する図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
処理装置
22日前
日本電気株式会社
システム及び方法
今日
日本電気株式会社
測位装置及びその方法
16日前
日本電気株式会社
回路装置及び制御方法
1か月前
日本電気株式会社
取付構造及び半導体部品
20日前
日本電気株式会社
光軸調整方法および装置
1か月前
日本電気株式会社
光通信システム及び光通信方法
23日前
日本電気株式会社
光送信器及び光送信器の制御方法
22日前
日本電気株式会社
超伝導デバイスおよびその製造方法
27日前
日本電気株式会社
制御装置、制御方法、及びプログラム
1か月前
日本電気株式会社
共振器、発振器、および共振器の製造方法
1か月前
日本電気株式会社
判定装置、判定方法、及び判定プログラム
今日
日本電気株式会社
判定システム、判定方法、及びプログラム
1か月前
日本電気株式会社
配信装置、配信方法、及び、配信プログラム
1か月前
日本電気株式会社
デジタル署名システム、方法並びに記録媒体
1か月前
日本電気株式会社
モデル生成装置、モデル生成方法、プログラム
1か月前
日本電気株式会社
プログラム、情報処理方法、及び情報処理装置
1か月前
日本電気株式会社
プログラム、情報処理方法、及び情報処理装置
1か月前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
20日前
日本電気株式会社
配送管理装置、配送管理方法、及びプログラム
6日前
日本電気株式会社
情報提供装置、情報提供方法、及びプログラム
22日前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
29日前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
22日前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
29日前
日本電気株式会社
情報処理装置、情報処理方法、およびプログラム
1か月前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
15日前
日本電気株式会社
光通信システム、光信号制御方法及び光通信装置
15日前
日本電気株式会社
光ネットワークシステム、制御方法、プログラム
14日前
日本電気株式会社
測位方法、移動体、プログラム及び測位システム
14日前
日本電気株式会社
関係可視化装置、関係可視化方法、及びプログラム
1か月前
日本電気株式会社
情報処理装置、可視化方法、及び、可視化プログラム
20日前
日本電気株式会社
システム同定装置、システム同定方法及びプログラム
20日前
日本電気株式会社
コントローラ、学習コスト削減方法、及びプログラム
1か月前
日本電気株式会社
車両追跡方法、車両追跡システム、およびプログラム
29日前
日本電気株式会社
通信システム、監視装置、監視方法、及びプログラム
13日前
日本電気株式会社
ポリシー管理装置、ポリシー管理方法及びプログラム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ