TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025103352
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220697
出願日
2023-12-27
発明の名称
測位方法、移動体、プログラム及び測位システム
出願人
日本電気株式会社
代理人
個人
主分類
G01S
5/14 20060101AFI20250702BHJP(測定;試験)
要約
【課題】逐次演算を削減し、高速測位可能な測位方法等を提供する。
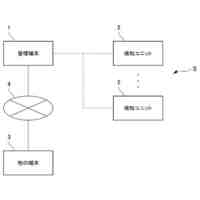
【解決手段】地上に固定された送信基準局と、前記送信基準局からの測位信号を受信する受信機を有する第1移動体又は前記第1移動体とは異なる第2移動体と、を備えた測位システムにおける測位方法が提供される。測定された第1移動体の位置を補正用停止位置として記憶するとともに、補正用停止位置と関連付けて、送信基準局と移動体との位相差と、送信基準局の位置と移動体の停止位置との距離を補正用パラメータとして記憶する。第1移動体又は第2移動体において、記憶した補正用パラメータを取得し、補正用停止位置において、補正用パラメータに基づいて、送信基準局のクロックと、前記第1移動体又は前記第2移動体のクロックとを同期させる。
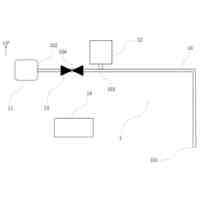
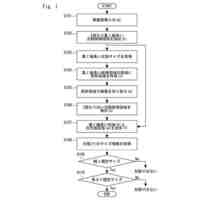
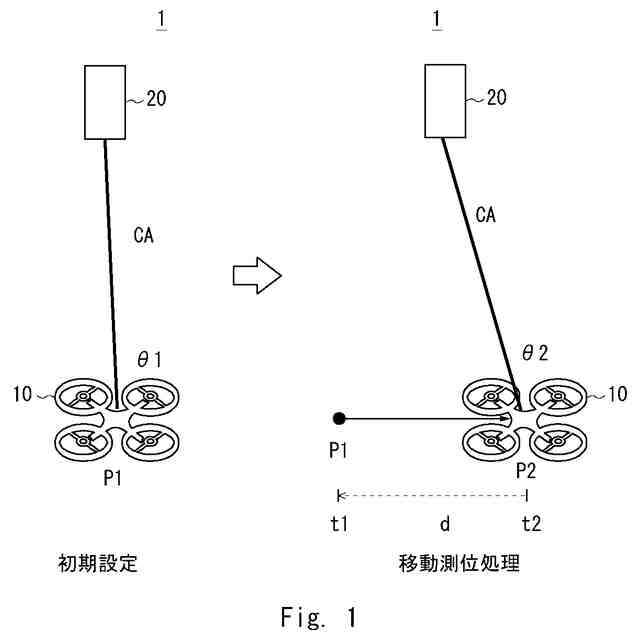
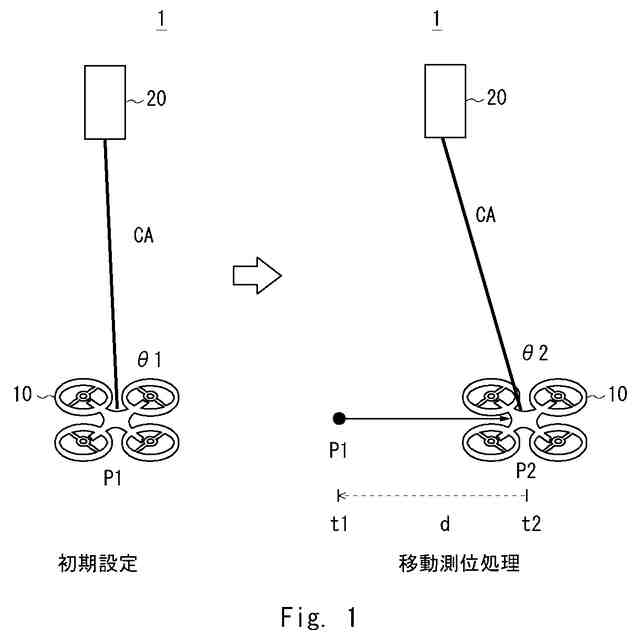
【選択図】図1
特許請求の範囲
【請求項1】
地上に固定された送信基準局と、前記送信基準局からの測位信号を受信する受信機を有する第1移動体又は前記第1移動体と通信可能な第2移動体と、を備えた測位システムによる測位方法であって、
前記第1移動体を停止させ、前記第1移動体の前記受信機により前記送信基準局から測位信号を受信して、前記第1移動体の停止位置を測定するとともに、当該停止位置における前記送信基準局からの測位信号の搬送波の位相を取得し、
前記送信基準局と前記第1移動体との位相差を算出し、
前記送信基準局の位置と、前記第1移動体の測定された停止位置から、前記送信基準局の位置と前記第1移動体の停止位置との距離を算出し、
測定された前記第1移動体の位置を補正用停止位置として記憶するとともに、前記補正用停止位置と関連付けて、前記送信基準局と前記第1移動体との位相差と、前記送信基準局の位置と前記第1移動体の停止位置との距離を補正用パラメータとして記憶し、
前記第1移動体又は前記第2移動体において、記憶した前記補正用パラメータを取得し、
前記補正用停止位置において、前記補正用パラメータに基づいて、前記送信基準局のクロックと、前記第1移動体又は前記第2移動体のクロックとを同期させて、
前記送信基準局のクロックと、前記第1移動体又は前記第2移動体のクロックとを同期させた状態で、前記第1移動体又は前記第2移動体を移動させ、前記送信基準局からの測位信号を、前記第1移動体又は前記第2移動体の前記受信機により受信して、前記第1移動体又は前記第2移動体の位置を測定する、測位方法。
続きを表示(約 2,900 文字)
【請求項2】
地上に固定され、互いに通信可能に接続された複数の前記送信基準局を更に備えた測位システムに用いられる測位方法であって、
前記複数の送信基準局のうち一つの送信基準局のクロックと、前記第1移動体又は前記第2移動体のクロックとを同期させた後に、前記複数の送信基準局のクロックを互いに同期させるために、互いに通信し、
前記複数の送信基準局のクロックと、前記第1移動体又は前記第2移動体のクロックとを同期させた状態で、前記第1移動体又は前記第2移動体を移動させ、前記複数の送信基準局からの測位信号を前記第1移動体又は前記第2移動体の前記受信機により受信して、前記第1移動体又は前記第2移動体の位置を測定する、
請求項1に記載の測位方法。
【請求項3】
前記送信基準局のクロックと前記第1移動体又は前記第2移動体のクロックとの同期は、PLL(フェーズ・ロック・ループ)制御を用いる、請求項1に記載の測位方法。
【請求項4】
前記第1移動体は、前記補正用停止位置及び前記補正用パラメータを記憶する記憶部を有する、請求項1に記載の測位方法。
【請求項5】
地上に固定された送信基準局からの測位信号を受信する受信機と、
少なくとも1つの命令を記憶する記憶部と、
前記命令を実行する少なくとも1つのプロセッサと、を備えた移動体であって、
前記少なくとも1つの命令は、
前記移動体を停止させ、前記移動体の前記受信機により前記送信基準局から測位信号を受信して、前記移動体の停止位置を測定するとともに、当該停止位置における前記送信基準局からの測位信号の搬送波の位相を取得し、
前記送信基準局と前記移動体との位相差を算出し、
前記送信基準局の位置と、前記移動体の測定された停止位置から、前記送信基準局の位置と前記移動体の停止位置との距離を算出し、
測定された前記移動体の位置を補正用停止位置として記憶するとともに、前記補正用停止位置と関連付けて、前記送信基準局と前記移動体との位相差と、前記送信基準局の位置と前記移動体の停止位置との距離を補正用パラメータとして記憶し、
記憶した前記補正用パラメータを取得し、
前記補正用停止位置において、前記補正用パラメータに基づいて、前記送信基準局のクロックと、移動体のクロックとを同期させて、
前記送信基準局のクロックと、前記移動体の受信機のクロックとを同期させた状態で、前記移動体を移動させ、前記送信基準局からの測位信号を前記受信機により受信して、前記移動体の位置を測定することを含む、
移動体。
【請求項6】
前記送信基準局のクロックと、前記移動体のクロックとの同期させるPLL(Phase Locked Loop)回路を更に備える、請求項5に記載の移動体。
【請求項7】
測定された前記移動体の位置を補正用停止位置として記憶する記憶部を有する、請求項5に記載の移動体。
【請求項8】
地上に固定された送信基準局からの測位信号を受信する受信機を有する移動体に用いられるプログラムであって、
前記移動体を停止させ、前記移動体の前記受信機により前記送信基準局から測位信号を受信して、前記移動体の停止位置を測定するとともに、当該停止位置における前記送信基準局からの測位信号の搬送波の位相を取得し、
前記送信基準局と前記移動体との位相差を算出し、
前記送信基準局の位置と、前記移動体の測定された停止位置から、前記送信基準局の位置と前記移動体の停止位置との距離を算出し、
測定された前記移動体の位置を補正用停止位置として記憶するとともに、前記補正用停止位置と関連付けて、前記送信基準局と前記移動体との位相差と、前記送信基準局の位置と前記移動体の停止位置との距離を補正用パラメータとして記憶し、
記憶した前記補正用パラメータを取得し、
前記補正用停止位置において、前記補正用パラメータに基づいて、前記送信基準局のクロックと、移動体のクロックとを同期させて、
前記送信基準局のクロックと、前記移動体の受信機のクロックとを同期させた状態で、前記移動体を移動させ、前記送信基準局からの測位信号を前記受信機により受信して、前記移動体の位置を測定する処理をコンピュータに実行させる、プログラム。
【請求項9】
地上に固定された送信基準局と、前記送信基準局からの測位信号を受信する受信機を有する第1移動体と、前記第1移動体と通信可能な第2移動体と、を備えた測位システムであって、
前記第1移動体は、
地上に固定された送信基準局からの測位信号を受信する受信機と、
少なくとも1つの命令を記憶する記憶部と、
前記命令を実行する少なくとも1つのプロセッサと、を備え、
前記少なくとも1つの命令は、
前記第1移動体を停止させ、前記第1移動体の前記受信機により前記送信基準局から測位信号を受信して、前記第1移動体の停止位置を測定するとともに、当該停止位置における前記送信基準局からの測位信号の搬送波の位相を取得し、
前記送信基準局と前記第1移動体との位相差を算出し、
前記送信基準局の位置と、前記第1移動体の測定された停止位置から、前記送信基準局の位置と前記第1移動体の停止位置との距離を算出し、
測定された前記第1移動体の位置を補正用停止位置として記憶するとともに、前記補正用停止位置と関連付けて、前記送信基準局と前記第1移動体との位相差と、前記送信基準局の位置と前記第1移動体の停止位置との距離を補正用パラメータとして記憶することを含み、
前記第2移動体は、
地上に固定された前記送信基準局からの測位信号を受信する受信機と、
少なくとも1つの命令を記憶する記憶部と、
前記命令を実行する少なくとも1つのプロセッサと、を備え、
前記少なくとも1つの命令は、
前記第1移動体からネットワークを介して、記憶した前記補正用パラメータを取得し、
前記補正用停止位置において、前記補正用パラメータに基づいて、前記送信基準局のクロックと、前記第2移動体のクロックとを同期させて、
前記送信基準局のクロックと、前記第2移動体の受信機のクロックとを同期させた状態で、前記第2移動体を移動させ、前記送信基準局からの測位信号を前記第2移動体の前記受信機により受信して、前記第2移動体の位置を測定することを含む、
測位システム。
【請求項10】
ネットワークを介して互いに通信可能に接続された複数の送信基準局を更に備え、
各送信基準局は、各送信基準局のクロックを同期させるように互いに通信する、請求項9に記載の測位システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、測位方法、移動体、プログラム及び測位システムに関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
衛星測位システムでは、測位を行う際に、高精度な位置測位を行うためには、搬送波位相測位が用いられている。搬送波位相測位は、受信測位局は送信基準局からの測位信号を受信し、その受信した測位信号の位相から送信基準局と受信測位局との距離を求めるものである。
【先行技術文献】
【特許文献】
【0003】
特開2004-286494号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
屋内測位を行う場合には、複数の送信基準局は互いにケーブル等で通信可能に接続され、各送信基準局は地上等に固定されているので、各送信基準局は、定期的に信号を互いに送信し、その遅延量を把握でき、複数の送信基準局間の時刻差を無くすことができる。しかし、送信基準局と受信測位局との間の時刻差を無くすことができない場合がある。
【0005】
その場合には、受信測位局である移動体を移動させて、複数の場所で取得した位相情報を逐次計算することによって、送信基準局と受信測位局との間の時刻差を無くす必要があり、位置測位のために時間がかかる。
【0006】
本開示は、このような問題点を解決するためになされたものであり、事前に送信基準局と受信測位局(移動体)との間で同期することで、逐次演算を削減し、高速測位可能な測位方法等を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の一態様にかかる測位方法は、
地上に固定された送信基準局と、前記送信基準局からの測位信号を受信する受信機を有する第1移動体又は前記第1移動体と通信可能な第2移動体と、を備えた測位システムによる測位方法であって、
前記第1移動体を停止させ、前記第1移動体の前記受信機により前記送信基準局から測位信号を受信して、前記第1移動体の停止位置を測定するとともに、当該停止位置における前記送信基準局からの測位信号の搬送波の位相を取得し、
前記送信基準局と前記第1移動体との位相差を算出し、
前記送信基準局の位置と、前記第1移動体の測定された停止位置から、前記送信基準局の位置と前記第1移動体の停止位置との距離を算出し、
測定された前記第1移動体の位置を補正用停止位置として記憶するとともに、前記補正用停止位置と関連付けて、前記送信基準局と前記第1移動体との位相差と、前記送信基準局の位置と前記第1移動体の停止位置との距離を補正用パラメータとして記憶し、
前記第1移動体又は前記第2移動体において、記憶した前記補正用パラメータを取得し、
前記補正用停止位置において、前記補正用パラメータに基づいて、前記送信基準局のクロックと、前記第1移動体又は前記第2移動体のクロックとを同期させて、
前記送信基準局のクロックと、前記第1移動体又は前記第2移動体のクロックとを同期させた状態で、前記第1移動体又は前記第2移動体を移動させ、前記送信基準局からの測位信号を、前記第1移動体又は前記第2移動体の前記受信機により受信して、前記第1移動体又は前記第2移動体の位置を測定する。
【0008】
本開示の一態様にかかる移動体は、
地上に固定された送信基準局からの測位信号を受信する受信機と、
少なくとも1つの命令を記憶する記憶部と、
前記命令を実行する少なくとも1つのプロセッサと、を備えた移動体であって、
前記少なくとも1つの命令は、
前記移動体を停止させ、前記移動体の前記受信機により前記送信基準局から測位信号を受信して、前記移動体の停止位置を測定するとともに、当該停止位置における前記送信基準局からの測位信号の搬送波の位相を取得し、
前記送信基準局と前記移動体との位相差を算出し、
前記送信基準局の位置と、前記移動体の測定された停止位置から、前記送信基準局の位置と前記移動体の停止位置との距離を算出し、
測定された前記移動体の位置を補正用停止位置として記憶するとともに、前記補正用停止位置と関連付けて、前記送信基準局と前記移動体との位相差と、前記送信基準局の位置と前記移動体の停止位置との距離を補正用パラメータとして記憶し、
記憶した前記補正用パラメータを取得し、
前記補正用停止位置において、前記補正用パラメータに基づいて、前記送信基準局のクロックと、移動体のクロックとを同期させて、
前記送信基準局のクロックと、前記移動体の受信機のクロックとを同期させた状態で、前記移動体を移動させ、前記送信基準局からの測位信号を前記受信機により受信して、前記移動体の位置を測定することを含む。
【0009】
本開示の一態様にかかるプログラムは、
地上に固定された送信基準局からの測位信号を受信する受信機を有する移動体に用いられるプログラムであって、
前記移動体を停止させ、前記移動体の前記受信機により前記送信基準局から測位信号を受信して、前記移動体の停止位置を測定するとともに、当該停止位置における前記送信基準局からの測位信号の搬送波の位相を取得し、
前記送信基準局と前記移動体との位相差を算出し、
前記送信基準局の位置と、前記移動体の測定された停止位置から、前記送信基準局の位置と前記移動体の停止位置との距離を算出し、
測定された前記移動体の位置を補正用停止位置として記憶するとともに、前記補正用停止位置と関連付けて、前記送信基準局と前記移動体との位相差と、前記送信基準局の位置と前記移動体の停止位置との距離を補正用パラメータとして記憶し、
記憶した前記補正用パラメータを取得し、
前記補正用停止位置において、前記補正用パラメータに基づいて、前記送信基準局のクロックと、移動体のクロックとを同期させて、
前記送信基準局のクロックと、前記移動体の受信機のクロックとを同期させた状態で、前記移動体を移動させ、前記送信基準局からの測位信号を前記受信機により受信して、前記移動体の位置を測定する処理をコンピュータに実行させる。
【0010】
本開示の一態様にかかる測位システムは、
地上に固定された送信基準局と、前記送信基準局からの測位信号を受信する受信機を有する第1移動体と、前記第1移動体と通信可能な第2移動体と、を備えた測位システムであって、
前記第1移動体は、
地上に固定された送信基準局からの測位信号を受信する受信機と、
少なくとも1つの命令を記憶する記憶部と、
前記命令を実行する少なくとも1つのプロセッサと、を備え、
前記少なくとも1つの命令は、
前記移動体を停止させ、前記移動体の前記受信機により前記送信基準局から測位信号を受信して、前記移動体の停止位置を測定するとともに、当該停止位置における前記送信基準局からの測位信号の搬送波の位相を取得し、
前記送信基準局と前記移動体との位相差を算出し、
前記送信基準局の位置と、前記移動体の測定された停止位置から、前記送信基準局の位置と前記移動体の停止位置との距離を算出し、
測定された前記移動体の位置を補正用停止位置として記憶するとともに、前記補正用停止位置と関連付けて、前記送信基準局と前記移動体との位相差と、前記送信基準局の位置と前記移動体の停止位置との距離を補正用パラメータとして記憶することを含み、
前記第2移動体は、
地上に固定された送信基準局からの測位信号を受信する受信機と、
少なくとも1つの命令を記憶する記憶部と、
前記命令を実行する少なくとも1つのプロセッサと、を備え、
前記少なくとも1つの命令は、
前記第1移動体からネットワークを介して、記憶した前記補正用パラメータを取得し、
前記補正用停止位置において、前記補正用パラメータに基づいて、前記送信基準局のクロックと、移動体のクロックとを同期させて、
前記送信基準局のクロックと、前記移動体の受信機のクロックとを同期させた状態で、前記移動体を移動させ、前記送信基準局からの測位信号を前記受信機により受信して、前記移動体の位置を測定することを含む。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ユニパルス株式会社
力変換器
5日前
株式会社豊田自動織機
産業車両
12日前
横浜ゴム株式会社
音響窓
7日前
株式会社国際電気
試験装置
19日前
個人
センサーを備えた装置
9日前
日置電機株式会社
測定装置
6日前
IPU株式会社
距離検出装置
5日前
日本精機株式会社
施工管理システム
9日前
株式会社東芝
センサ
8日前
株式会社田中設備
報知装置
13日前
株式会社CAST
センサ固定治具
12日前
日本装置開発株式会社
X線検査装置
22日前
富士電機株式会社
半導体パッケージ
1日前
株式会社熊平製作所
刃物類判別装置
12日前
WOTA株式会社
液位検出システム
19日前
アズビル株式会社
火炎状態判定装置
6日前
オムロン株式会社
スイッチング装置
19日前
本多電子株式会社
超音波ソナー装置
今日
個人
ヨウ素滴定を用いたアミノ酸の定量方法
16日前
トヨタ自動車株式会社
表面傷の検査方法
7日前
已久工業股ふん有限公司
空気圧縮機構造
8日前
トヨタ自動車株式会社
データの補正方法
今日
東ソー株式会社
クロマトグラムの形状判定方法
1日前
TDK株式会社
磁気検出システム
19日前
コニカミノルタ株式会社
光学特性測定装置
12日前
ミネベアミツミ株式会社
角度センサ
16日前
テックス理研株式会社
外周検査装置
27日前
ミネベアミツミ株式会社
角度センサ
16日前
株式会社 ミックウェア
端末装置及びプログラム
14日前
愛知時計電機株式会社
超音波流量計
5日前
ミネベアミツミ株式会社
ひずみゲージ
6日前
ミネベアミツミ株式会社
ひずみゲージ
12日前
新明和工業株式会社
ダンプカー
12日前
矢崎総業株式会社
導通検査装置
15日前
株式会社東芝
センサ及び電子装置
12日前
オプテックス株式会社
検知装置
15日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ