TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025100123
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023217257
出願日
2023-12-22
発明の名称
システム同定装置、システム同定方法及びプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
G05B
13/02 20060101AFI20250626BHJP(制御;調整)
要約
【課題】学習データにノイズが含まれる場合であっても精度よく対象を同定することができる方法を提供する。
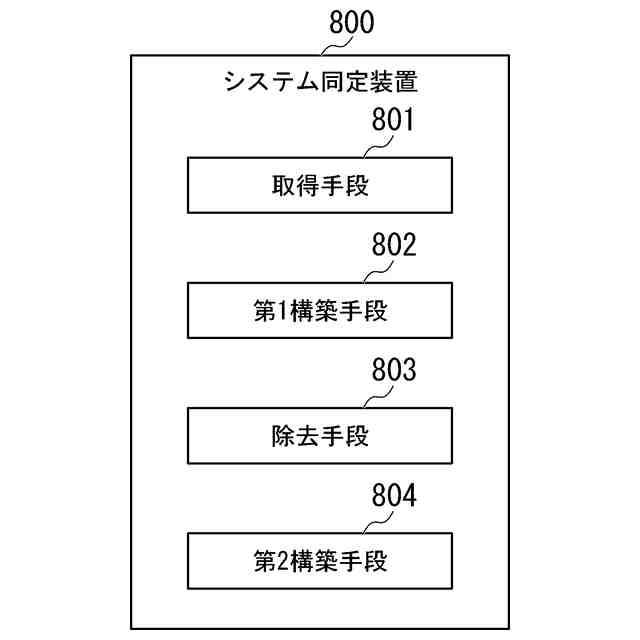
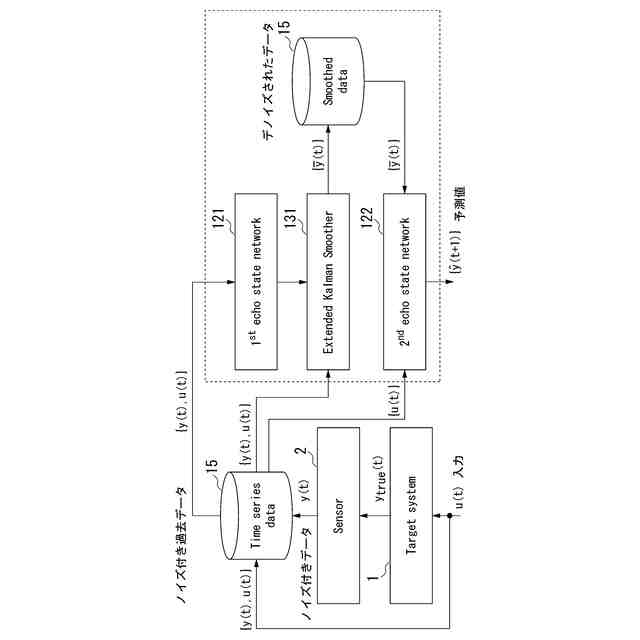
【解決手段】システム同定装置は、対象への入力値と前記同定対象の状態を示す観測値の時系列データを取得する手段と、前記時系列データを学習して、前記同定対象を同定した第1のモデルを構築する手段と、前記時系列データと、前記時系列データに基づいて前記第1のモデルが予測する前記同定対象の状態の予測値とに基づいて、前記時系列データからノイズを除去する手段と、前記ノイズが除去された前記時系列データを学習して、前記同定対象を同定した第2のモデルを構築する手段と、を備える。
【選択図】図12
特許請求の範囲
【請求項1】
同定対象への入力値および前記同定対象の状態を示す観測値の時系列データを取得する手段と、
前記時系列データを学習することにより、前記同定対象を同定した第1のモデルを構築する手段と、
前記時系列データと、前記時系列データに基づいて前記第1のモデルが予測する前記同定対象の状態の予測値と、に基づいて、前記時系列データからノイズを除去する手段と、
前記ノイズが除去された前記時系列データを学習することにより、前記同定対象を同定した第2のモデルを構築する手段と、
を備えるシステム同定装置。
続きを表示(約 1,500 文字)
【請求項2】
前記第1のモデルを構築する手段が、前記第1のモデルを構築し、
前記ノイズを除去する手段が、前記第1のモデルを用いて前記時系列データからノイズを除去した後に、
前記第1のモデルを構築する手段が、前記ノイズが除去された前記時系列データを学習して、前記第1のモデルを再度構築し、前記ノイズを除去する手段が、再度構築された前記第1のモデルを用いて前記時系列データからノイズを除去する、という処理を1回または複数回繰り返し、
前記第2のモデルを構築する手段は、前記処理を1回または複数回繰り返して生成された前記ノイズが除去された前記時系列データを学習して、前記第2のモデルを構築する、
請求項1に記載のシステム同定装置。
【請求項3】
前記同定対象は、時間とともに非線形に挙動が変化する非線形動的システムである、
請求項1または請求項2に記載のシステム同定装置。
【請求項4】
前記第1のモデルと前記第2のモデルは、リザーバコンピューティングである、
請求項1または請求項2に記載のシステム同定装置。
【請求項5】
前記第1のモデルと前記第2のモデルは、エコーステートネットワークである、
請求項1または請求項2に記載のシステム同定装置。
【請求項6】
前記ノイズを除去する手段は、カルマンスムーザーによって前記ノイズの除去を行う、
請求項1または請求項2に記載のシステム同定装置。
【請求項7】
前記入力値と前記観測値を前記第2のモデルに入力することにより、前記同定対象の状態を予測する手段、
をさらに備える請求項1または請求項2に記載のシステム同定装置。
【請求項8】
前記時系列データを取得する手段は、前記同定対象の動作中に当該同定対象から前記時系列データを取得し、
前記第1のモデルを構築する手段は、前記同定対象の動作中に前記第1のモデルを構築し、
前記ノイズを除去する手段は、前記同定対象の動作中に前記ノイズを除去し、
前記第2のモデルを構築する手段は、前記同定対象の動作中に前記第2のモデルを構築し、
前記予測する手段は、前記同定対象の動作中に構築された前記第2のモデルに基づいて、動作中の前記同定対象の未来の状態を予測する、
請求項7に記載のシステム同定装置。
【請求項9】
同定対象への入力値および前記同定対象の状態を示す観測値の時系列データを取得し、
前記時系列データを学習することにより、前記同定対象を同定した第1のモデルを構築し、
前記時系列データと、前記時系列データに基づいて前記第1のモデルが予測する前記同定対象の状態の予測値と、に基づいて、前記時系列データからノイズを除去し、
前記ノイズが除去された前記時系列データを学習することにより、前記同定対象を同定した第2のモデルを構築する、
システム同定方法。
【請求項10】
コンピュータを、
同定対象への入力値および前記同定対象の状態を示す観測値の時系列データを取得する手段、
前記時系列データを学習することにより、前記同定対象を同定した第1のモデルを構築する手段、
前記時系列データと、前記時系列データに基づいて前記第1のモデルが予測する前記同定対象の状態の予測値と、に基づいて、前記時系列データからノイズを除去する手段、
前記ノイズが除去された前記時系列データを学習することにより、前記同定対象を同定した第2のモデルを構築する手段、
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、システム同定装置、システム同定方法及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、エコーステートネットワーク(ESN:Echo State Network)で構築された学習済みモデルによって、自動車やデスクに着座するユーザの脈拍や呼吸等の観測値からユーザの眠気を推定するシステムが開示されている。ESNは、リカレントニューラルネットワークと同様に、入力層、リザバー(Reservoir)層、出力層から構成されるが、ESNの場合、入力層とリザバー層はランダムに生成した後、学習せず、出力層だけを学習してモデルを構築する。そのため、学習に要する計算コストが少なく、短時間にモデルを構築することができる。ESNは、リザーバコンピューティング(Reservoir computing)の一種である。ESNを用いると、例えば、モデル化対象の機械等の動作中に速やかにシステム同定してモデルを構築し、構築したモデルによって、未来の対象の状態を予測し、その予測を制御等に活用することができる。
【0003】
ESNを用いると、短時間で高精度にシステム同定を行うことができるが、学習データとしてセンサ等の観測値を用いると、観測値に含まれるノイズの影響により、モデルの精度が低下する可能性がある。
【先行技術文献】
【特許文献】
【0004】
特開2020-185284
【発明の概要】
【発明が解決しようとする課題】
【0005】
学習データにノイズが含まれる場合であっても、高精度にモデルを構築することができる技術を提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
本開示の一態様によれば、システム同定装置は、同定対象への入力値および前記同定対象の状態を示す観測値の時系列データを取得する手段と、前記時系列データを学習することにより、前記同定対象を同定した第1のモデルを構築する手段と、前記時系列データと、前記時系列データに基づいて前記第1のモデルが予測する前記同定対象の状態の予測値と、に基づいて、前記時系列データからノイズを除去する手段と、前記ノイズが除去された前記時系列データを学習することにより、前記同定対象を同定した第2のモデルを構築する手段と、を備える。
【0007】
本開示の一態様によれば、システム同定方法は、同定対象への入力値および前記同定対象の状態を示す観測値の時系列データを取得し、前記時系列データを学習することにより、前記同定対象を同定した第1のモデルを構築し、前記時系列データと、前記時系列データに基づいて前記第1のモデルが予測する前記同定対象の状態の予測値と、に基づいて、前記時系列データからノイズを除去し、前記ノイズが除去された前記時系列データを学習することにより、前記同定対象を同定した第2のモデルを構築する。
【0008】
本開示の一態様によれば、プログラムは、コンピュータを、同定対象への入力値および前記同定対象の状態を示す観測値の時系列データを取得する手段、前記時系列データを学習することにより、前記同定対象を同定した第1のモデルを構築する手段、前記時系列データと、前記時系列データに基づいて前記第1のモデルが予測する前記同定対象の状態の予測値と、に基づいて、前記時系列データからノイズを除去する手段、前記ノイズが除去された前記時系列データを学習することにより、前記同定対象を同定した第2のモデルを構築する手段、として機能させる。
【発明の効果】
【0009】
本開示によれば、学習データにノイズが含まれる場合であっても、高精度にシステム同定を行って、対象のモデルを構築することができる。
【図面の簡単な説明】
【0010】
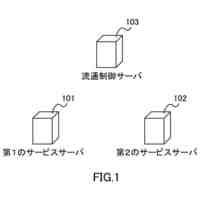
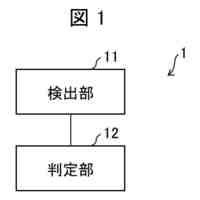
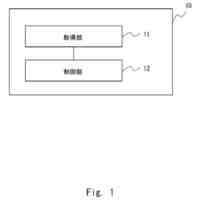
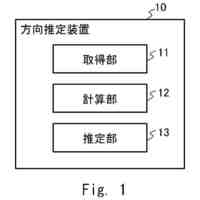
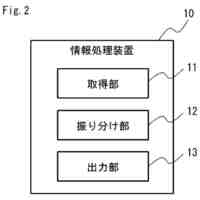
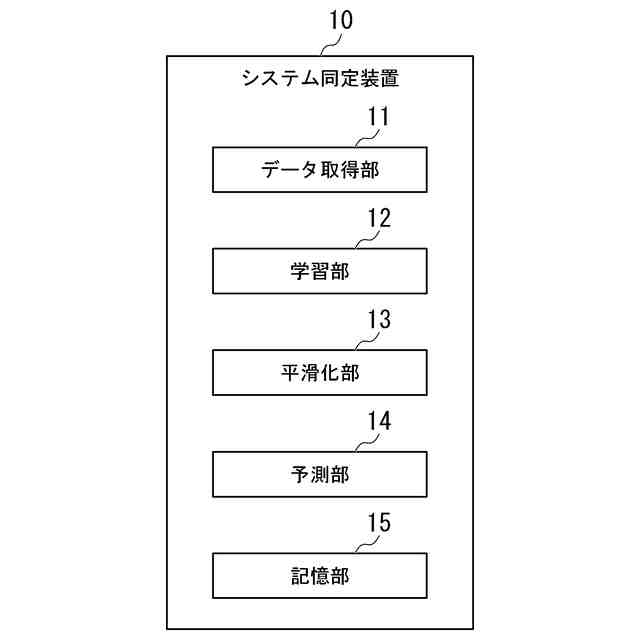
実施形態に係るシステム同定装置の一例を示す図である。
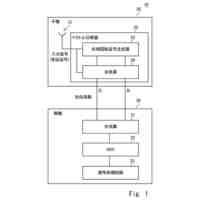
実施形態に係るシステム同定処理の構成例を示す図である。
実施形態に係るシステム同定処理の一例を示すフローチャートである。
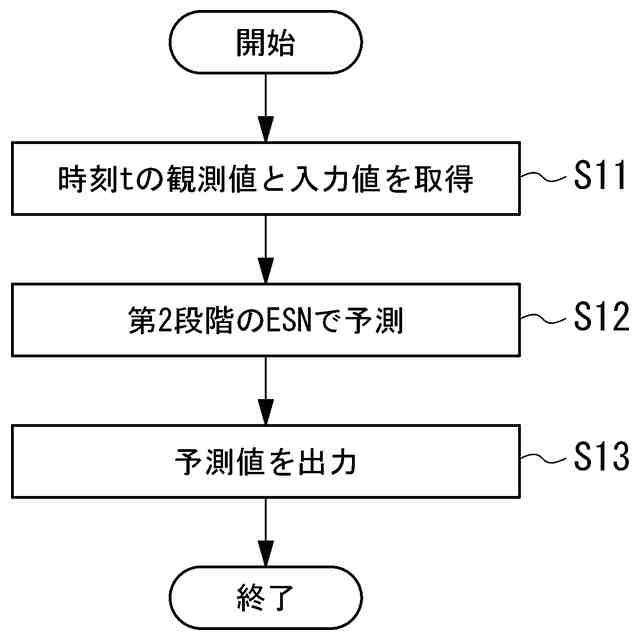
実施形態に係る予測処理の一例を示すフローチャートである。
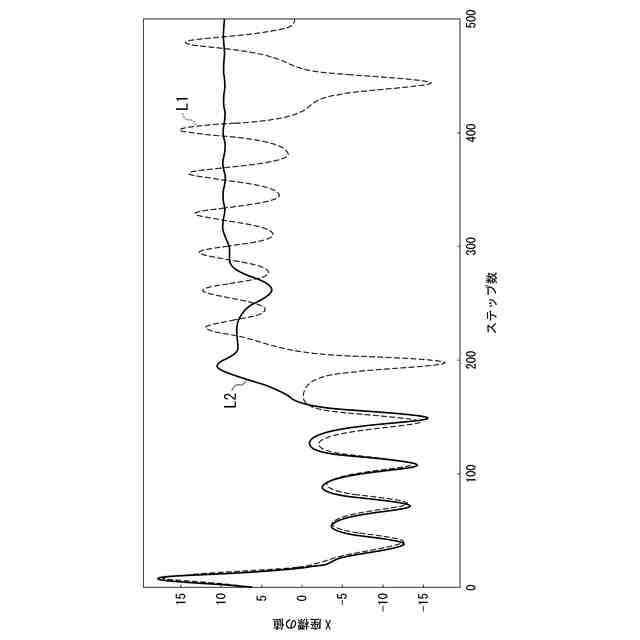
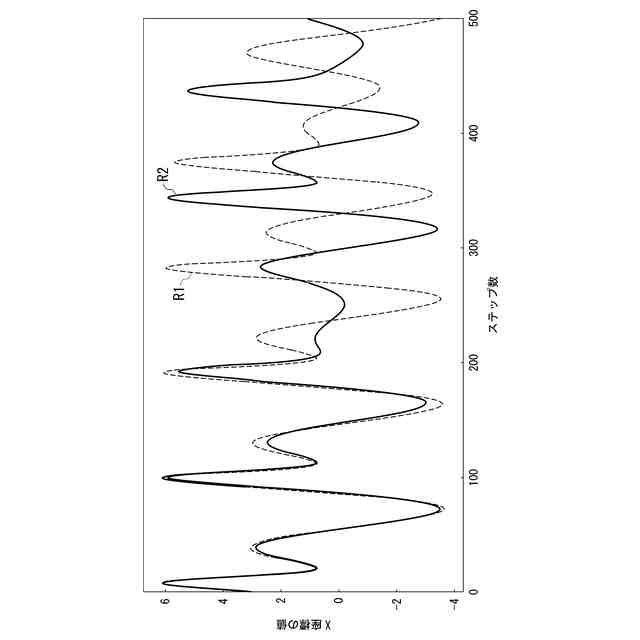
ノイズを含まない観測値に基づく予測結果の一例を示す第1の図である。
ノイズを含む観測値に基づく予測結果の一例を示す第1の図である。
実施形態に係るESNを用いたノイズを含む観測値に基づく予測結果の一例を示す第1の図である。
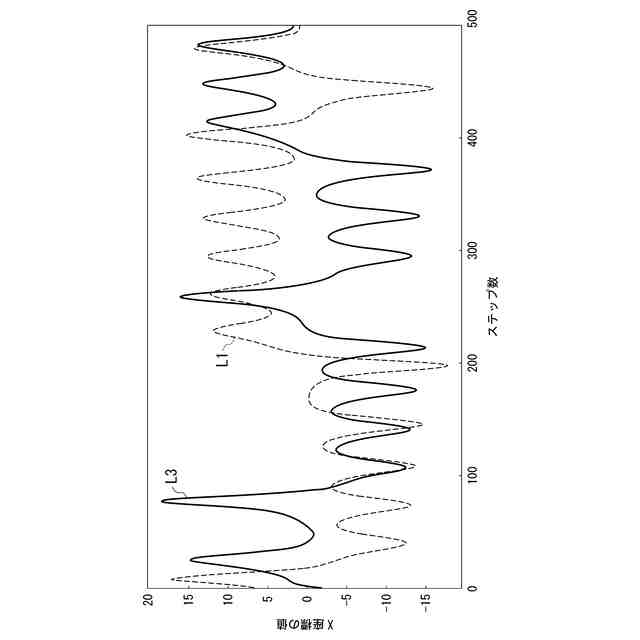
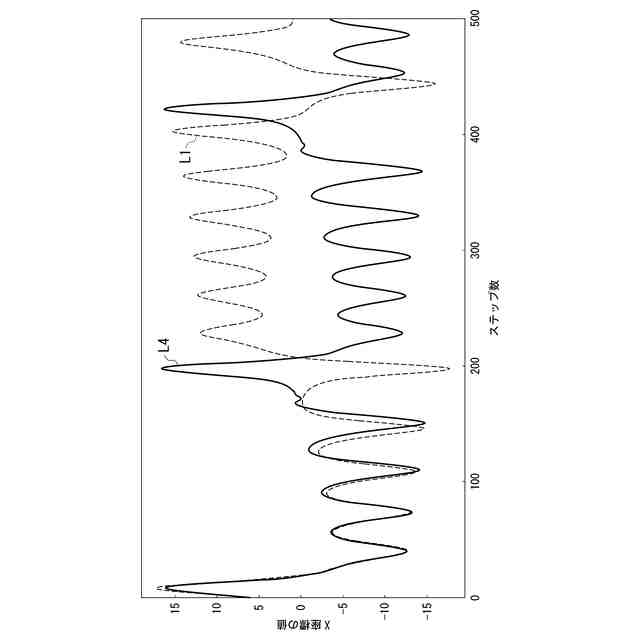
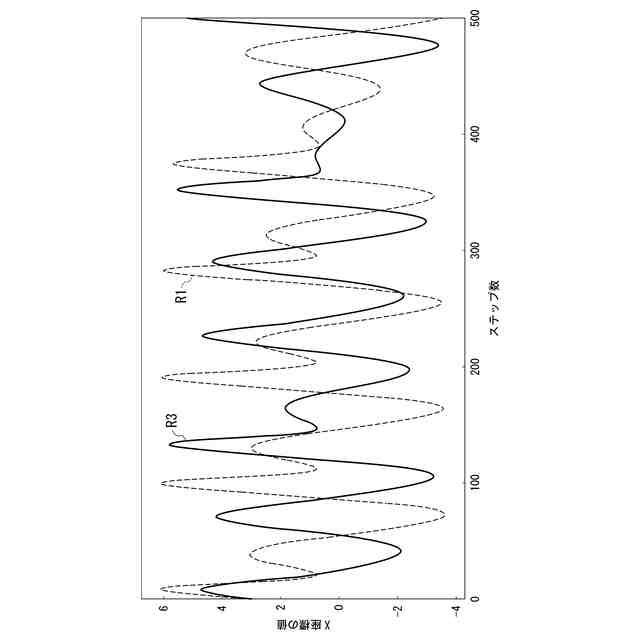
ノイズを含まない観測値に基づく予測結果の一例を示す第2の図である。
ノイズを含む観測値に基づく予測結果の一例を示す第2の図である。
第1実施形態に係るESNを用いたノイズを含む観測値に基づく予測結果の一例を示す第2の図である。
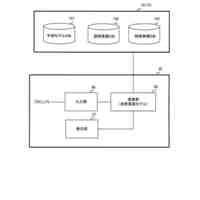
実施形態に係るシステム同定処理の構成例を示す第2の図である。
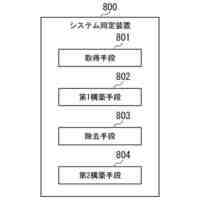
実施形態に係るシステム同定装置の一例を示す第2の図である。
実施形態に係るシステム同定処理の一例を示す第2のフローチャートである。
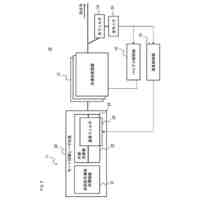
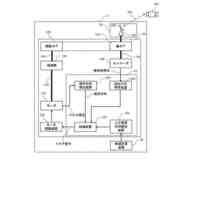
実施形態に係るシステム同定装置のハードウェア構成の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
電子装置
3日前
日本電気株式会社
処理装置
26日前
日本電気株式会社
システム及び方法
4日前
日本電気株式会社
測位装置及びその方法
20日前
日本電気株式会社
取付構造及び半導体部品
24日前
日本電気株式会社
光通信システム及び光通信方法
27日前
日本電気株式会社
光送信器及び光送信器の制御方法
26日前
日本電気株式会社
電子装置及びネットワークシステム
3日前
日本電気株式会社
判定装置、判定方法、及び判定プログラム
4日前
日本電気株式会社
配送管理装置、配送管理方法、及びプログラム
10日前
日本電気株式会社
情報処理装置、情報処理方法、及びプログラム
24日前
日本電気株式会社
情報提供装置、情報提供方法、及びプログラム
26日前
日本電気株式会社
画像生成装置、画像生成方法及び、プログラム
2日前
日本電気株式会社
情報生成装置、情報生成方法およびプログラム
2日前
日本電気株式会社
光通信システム、光信号制御方法及び光通信装置
19日前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
19日前
日本電気株式会社
光ネットワークシステム、制御方法、プログラム
18日前
日本電気株式会社
測位方法、移動体、プログラム及び測位システム
18日前
日本電気株式会社
情報処理装置、情報処理方法、及び、プログラム
26日前
日本電気株式会社
システム同定装置、システム同定方法及びプログラム
24日前
日本電気株式会社
情報処理装置、可視化方法、及び、可視化プログラム
24日前
日本電気株式会社
通信システム、監視装置、監視方法、及びプログラム
17日前
日本電気株式会社
管理装置、管理システム、管理方法、及びプログラム
26日前
NECソリューションイノベータ株式会社
処理装置
2日前
日本電気株式会社
情報処理装置、データ抽出方法、及びデータ抽出プログラム
25日前
日本電気株式会社
システム構成導出装置、システム構成導出方法及びプログラム
25日前
日本電気株式会社
超伝導量子回路、量子ビット、量子コンピュータ、及び製造方法
25日前
日本電気株式会社
方向推定装置、無線通信装置、方向推定方法、及び、プログラム
24日前
日本電気株式会社
光ファイバ監視システム、遠隔監視装置及び光ファイバ監視方法
2日前
日本電気株式会社
情報処理装置、情報処理システム、情報処理方法、及びプログラム
3日前
日本電気株式会社
漏洩検知システム、漏洩検知装置、漏洩検知方法、及びプログラム
27日前
日本電気株式会社
情報管理装置、情報管理システム、情報管理方法、およびプログラム
24日前
日本電気株式会社
通信制御装置、通信システム、通信制御プログラム、及び通信制御方法
18日前
日本電気株式会社
ベクトル分解器、光無線伝送システム、通信装置、及びベクトル分解方法
24日前
日本電気株式会社
認証暗号化装置、認証復号装置、認証暗号システム、方法及びプログラム
2日前
日本電気株式会社
回転駆動装置、回転駆動方法、回転駆動プログラム、およびアンテナ装置
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ