TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103383
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220739
出願日
2023-12-27
発明の名称
回転駆動装置、回転駆動方法、回転駆動プログラム、およびアンテナ装置
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
H01Q
3/04 20060101AFI20250702BHJP(基本的電気素子)
要約
【課題】離散的なパルスを含む信号を出力するエンコーダなどの位相検出装置を用いて角度を検出しても、その誤差により制限される精度よりも高い精度で角度検出値を得られるようにすることに寄与する。
【解決手段】回転角度検出装置と、減速機と、回転装置と、方向検出装置とを備える回転駆動装置が提供される。回転角度検出装置は、電力が供給されて第1の回転軸を回転駆動するモータの回転方向および回転量を検出する。減速機は、回転駆動された前記第1の回転軸の回転速度を減速させて第2の回転軸を回転駆動する。回転装置は、回転速度が減速された前記第2の回転軸により回転駆動され、方向が定義された対象物を回転駆動する。方向検出装置は、前記対象物に対して定義された方向を検出する。
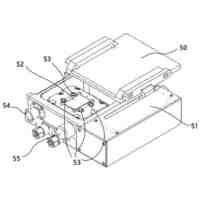
【選択図】図2A
特許請求の範囲
【請求項1】
電力が供給されて第1の回転軸を回転駆動するモータの回転方向および回転量を検出する第1の回転角度検出装置と、
回転駆動された前記第1の回転軸の回転速度を減速させて第2の回転軸を回転駆動する減速機と、
回転速度が減速された前記第2の回転軸により回転駆動され、方向が定義された対象物を回転駆動する回転駆動装置と、
検出された前記モータの回転方向および回転量に基づいて、前記対象物に対して定義された方向を検出する方向検出装置と
を備える回転駆動装置。
続きを表示(約 1,900 文字)
【請求項2】
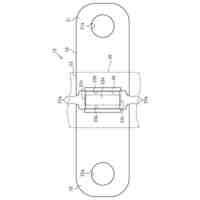
前記回転駆動装置と前記方向検出装置とは、前記回転駆動装置の回転に対応する方向に前記回転駆動装置と同じ回転量で回転するギアを介して取り付けられる
請求項1に記載の回転駆動装置。
【請求項3】
前記対象物は指向性を有するアンテナであり、
前記アンテナに対して定義された方向は、前記アンテナが最も大きい利得を示す方向である
請求項1に記載の回転駆動装置。
【請求項4】
前記第1の回転角度検出装置により検出された回転方向および回転量から、前記アンテナに対して定義された方向を算出する第1の方向算出装置と、
前記方向検出装置により検出され、前記アンテナに対して定義された方向を取得する方向取得装置と
をさらに備える請求項3に記載の回転駆動装置。
【請求項5】
前記モータに電力を供給して駆動するモータ駆動装置と、
目標物の位置を示す方向を算出する第2の方向算出装置と、
前記対象物に対して定義された方向と、前記目標物の位置を示す方向とを合わせるように前記モータ駆動装置を制御して前記モータを駆動させる制御装置と
をさらに備える請求項4に記載の回転駆動装置。
【請求項6】
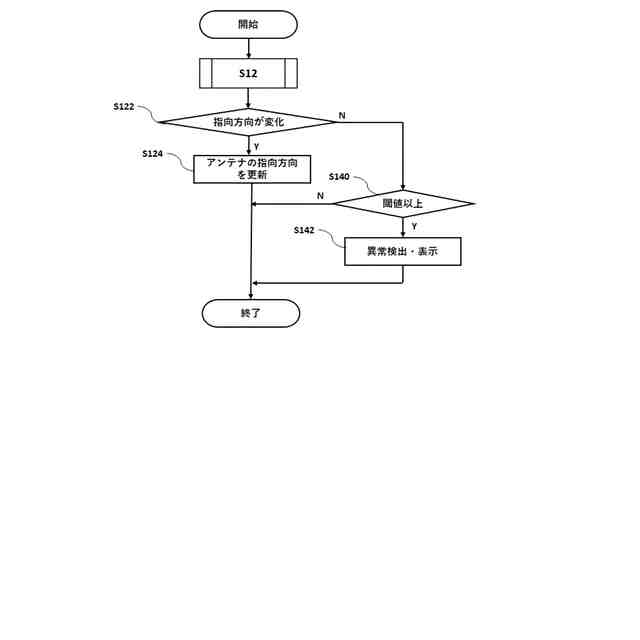
前記制御装置は、前記第1の方向算出装置により算出された前記方向と、前記方向取得装置により取得された前記方向とに、予め決められた閾値以上の差分がある場合には、前記方向取得装置により取得された方向を、実際に前記対象物が向いている方向とする
請求項5に記載の回転駆動装置。
【請求項7】
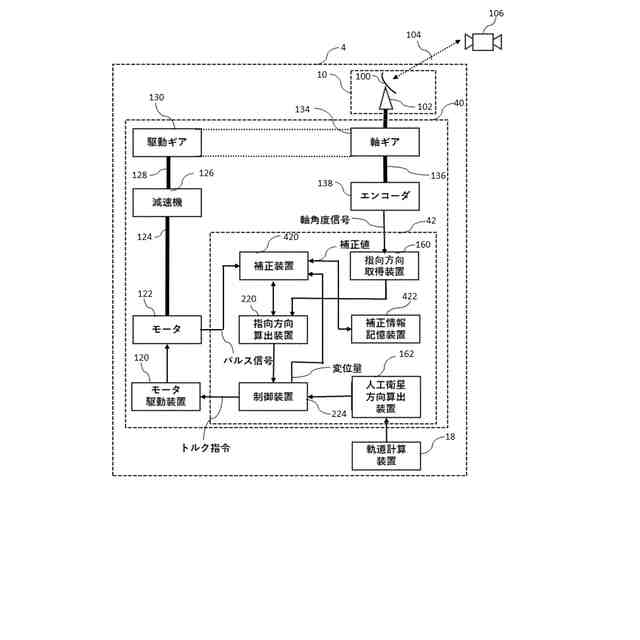
前記対象物に対して定義された方向に応じた補正量に基づいて、前記第1の方向算出装置により算出される前記方向を補正する補正装置
をさらに備える請求項5に記載の回転駆動装置。
【請求項8】
電力が供給されて第1の回転軸を回転駆動するモータの回転方向および回転量を検出する回転角度検出ステップと、
回転駆動された前記第1の回転軸の回転速度を減速させて第2の回転軸を回転駆動する減速ステップと、
回転速度が減速された前記第2の回転軸により回転駆動され、方向が定義された対象物を回転駆動する回転駆動ステップと、
検出された前記モータの回転方向および回転量に基づいて、前記対象物に対して定義された方向を検出する方向検出ステップと
を備える回転駆動方法。
【請求項9】
電力が供給されて第1の回転軸を回転駆動するモータの回転方向および回転量を検出する回転角度検出装置と、回転駆動された前記第1の回転軸の回転速度を減速させて第2の回転軸を回転駆動する減速機と、回転速度が減速された前記第2の回転軸により回転駆動され、方向が定義された対象物を回転駆動する回転駆動装置と、検出された前記モータの回転方向および回転量に基づいて、前記対象物に対して定義された方向を検出する方向検出装置とを備える回転駆動装置において、
前記回転角度検出装置により検出された回転方向および回転量から、前記対象物に対して定義された方向を算出する方向算出プロセスと、
前記方向検出装置により検出され、前記対象物に対して定義された方向を取得する方向取得プロセスと
を備える回転駆動プログラム。
【請求項10】
電力が供給されて第1の回転軸を回転駆動する第1のモータの回転方向および回転量の方位角成分を検出する第1の回転角度検出装置と、
回転駆動された前記第1の回転軸の回転速度を減速させて第2の回転軸を回転駆動する第1の減速機と、
回転速度が減速された前記第2の回転軸により回転駆動され、方向が定義されたアンテナを回転駆動する第1の回転駆動装置と、
検出された前記第1のモータの回転方向および回転量に基づいて、前記アンテナに対して定義された方向の方位角成分を検出する第1の方向検出装置と、
電力が供給されて第3の回転軸を回転駆動する第2のモータの回転方向および回転量の仰角成分を検出する第2の回転角度検出装置と、
回転駆動された前記第3の回転軸の回転速度を減速させて第4の回転軸を回転駆動する第2の減速機と、
回転速度が減速された前記第4の回転軸により回転駆動され、方向が定義されたアンテナを回転駆動する第2の回転駆動装置と、
検出された前記第2のモータの回転方向および回転量に基づいて、前記アンテナに対して定義された方向の仰角成分を検出する第2の方向検出装置と
を備えるアンテナ装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、回転駆動装置、回転駆動方法、回転駆動プログラム、およびアンテナ装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
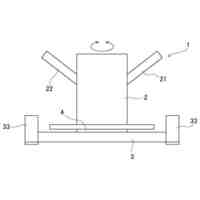
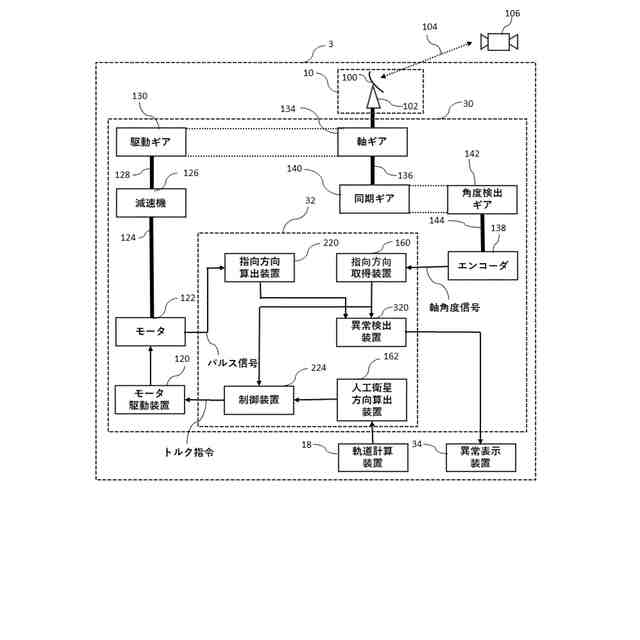
自動車などの移動体および人工衛星などの飛翔体といった目標物と通信したり、目標物が存在する位置を検出したりするために、パラボラアンテナおよび八木アンテナといった指向性を有するアンテナ(空中線)が用いられる。この場合、アンテナが最も高い利得を示す方向を、目標物が存在する方向に合わせる必要が生じる。この必要を満たすため、アンテナの指向方向を検出し、検出した方向に基づいて、アンテナの指向方向を目標物の方向に合わせる方法がとられる。指向性を有するアンテナ(指向性アンテナ)の方向を検出するために、このアンテナを既知の回転速度で回転させるモータの減速機の回転駆動軸に取り付けられたエンコーダから得られるパルスを用いる方法が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開昭61-267402号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
なお、上記先行技術文献の開示は、本書に引用をもって組み込まれる。以下の分析は、本発明者らによってなされたものである。
【0005】
上述した方法により角度を検出する装置においては、アナログ的な信号を出力するエンコーダではなく、離散的なパルスを含む信号を出力するエンコーダが用いられることがある。このようなエンコーダは、アンテナの回転駆動軸の回転角度を、光学的または機械的な手段により検出して量子化し、量子化した角度に応じた離散的な数のパルスを含む信号を出力する。従って、エンコーダを用いると、検出されるアンテナの方向の分解能は、エンコーダの1ステップ分の量子化誤差およびエンコーダ自体の誤差により制限されてしまう。そこで、エンコーダからの信号を用いてアンテナの方向を検出する場合であっても、エンコーダの量子化誤差およびエンコーダ自体の誤差により制限される精度よりも高い精度でアンテナの方向を検出することが望まれる。
【0006】
本開示の目的は、離散的なパルスを含む信号を出力するエンコーダなどの位相検出装置を用いて角度を検出しても、その誤差により制限される精度よりも高い精度で角度検出値を得られるようにすることに寄与することである。
【課題を解決するための手段】
【0007】
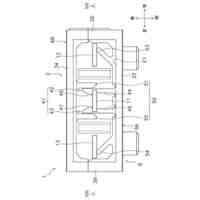
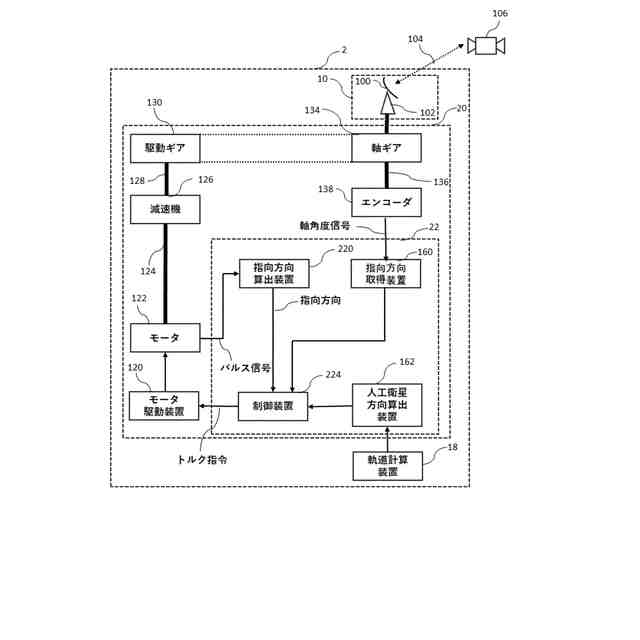
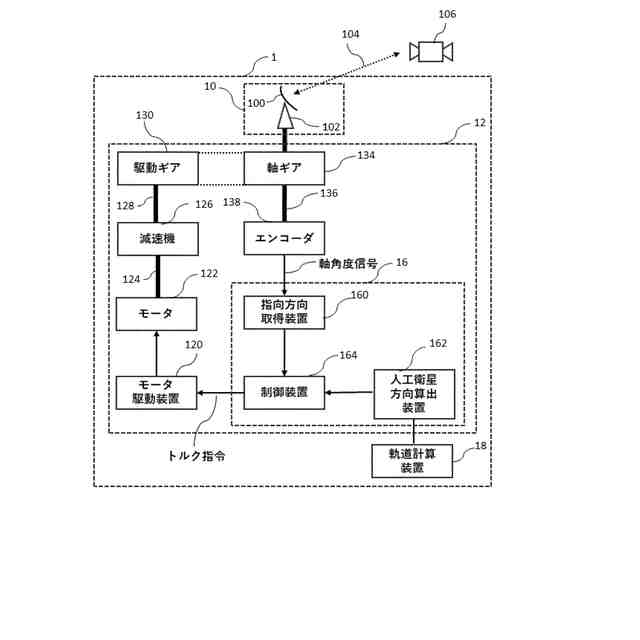
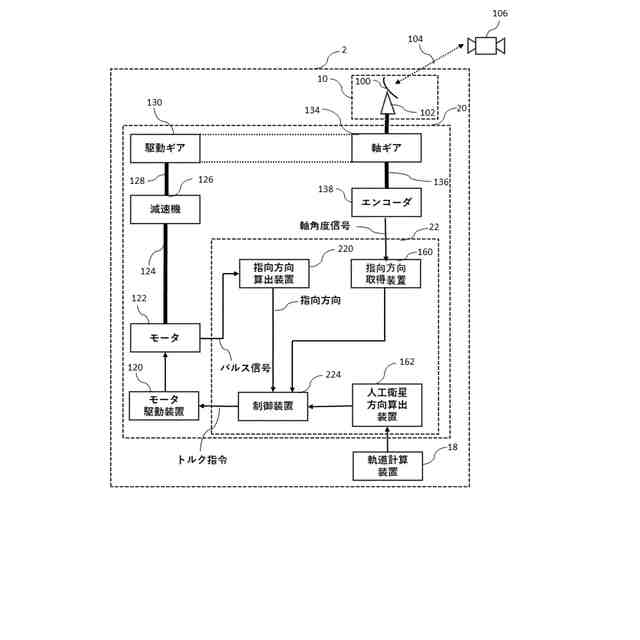
本開示の第1の視点では、第1の回転角度検出装置と、減速機と、回転駆動装置と、方向検出装置とを備える回転駆動装置が提供される。第1の回転角度検出装置は、電力が供給されて第1の回転軸を回転駆動するモータの回転方向および回転量を検出する。減速機は、回転駆動された前記第1の回転軸の回転速度を減速させて第2の回転軸を回転駆動する。回転駆動装置は、回転速度が減速された前記第2の回転軸により回転駆動され、方向が定義された対象物を回転駆動する。方向検出装置は、検出された前記モータの回転方向および回転量に基づいて、前記対象物に対して定義された方向を検出する。
【0008】
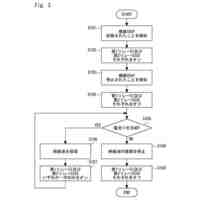
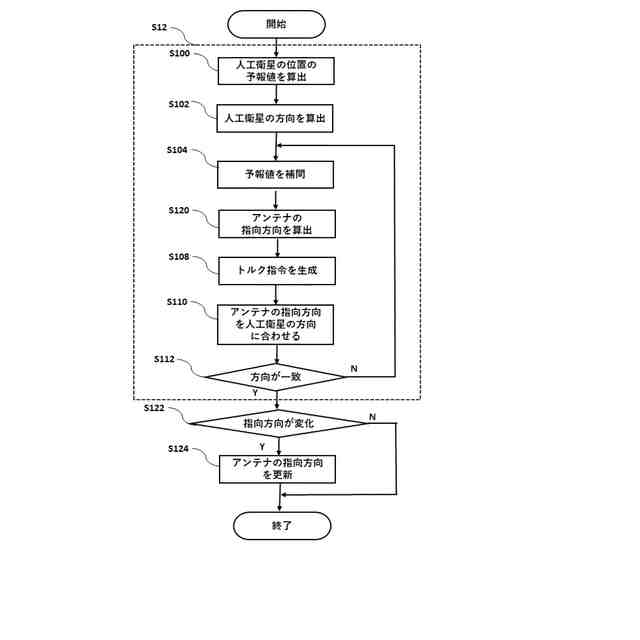
本開示の第2の視点では、回転角度検出ステップと、減速ステップと、回転駆動ステップと、方向検出ステップとを備える回転駆動方法が提供される。回転角度検出ステップは、電力が供給されて第1の回転軸を回転駆動するモータの回転方向および回転量を検出する。減速ステップは、回転駆動された前記第1の回転軸の回転速度を減速させて第2の回転軸を回転駆動する。回転駆動ステップは、回転速度が減速された前記第2の回転軸により回転駆動され、方向が定義された対象物を回転駆動する。方向検出ステップは、検出された前記モータの回転方向および回転量に基づいて、前記対象物に対して定義された方向を検出する。
【0009】
本開示の第3の視点では、本開示の第1の視点により提供される回転駆動装置において、方向算出プロセスと、方向取得プロセスとを備える回転駆動プログラムが提供される。方向算出プロセスは、前記回転角度検出装置により検出された回転方向および回転量から、前記対象物に対して定義された方向を算出する。方向取得プロセスは、前記方向検出装置により検出され、前記対象物に対して定義された方向を取得する。
【0010】
本開示の第4の視点では、第1の回転角度検出装置と、第1の減速機と、第1の回転駆動装置と、第1の方向検出装置と、第2の回転角度検出装置と、第2の減速機と、第2の回転駆動装置と、第2の方向検出装置とを備えるアンテナ装置が提供される。第1の回転角度検出装置は、電力が供給されて第1の回転軸を回転駆動する第1のモータの回転方向および回転量の方位角成分を検出する。第1の減速機は、回転駆動された前記第1の回転軸の回転速度を減速させて第2の回転軸を回転駆動する。第1の回転駆動装置は、回転速度が減速された前記第2の回転軸により回転駆動され、方向が定義されたアンテナを回転駆動する。第1の方向検出装置は、検出された前記第1のモータの回転方向および回転量に基づいて、前記アンテナに対して定義された方向の方位角成分を検出する。第2の回転角度検出装置は、電力が供給されて第3の回転軸を回転駆動する第2のモータの回転方向および回転量の仰角成分を検出する。第2の減速機は、回転駆動された前記第3の回転軸の回転速度を減速させて第4の回転軸を回転駆動する。第2の回転駆動装置は、回転速度が減速された前記第4の回転軸により回転駆動され、方向が定義されたアンテナを回転駆動する。第2の方向検出装置は、検出された前記第2のモータの回転方向および回転量に基づいて、前記アンテナに対して定義された方向の仰角成分を検出する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
情報処理装置、情報処理方法及び記録媒体
4日前
NECスペーステクノロジー株式会社
無線通信装置、無線通信方法、無線通信プログラムおよび地上局
4日前
日東精工株式会社
端子部品
26日前
株式会社潤工社
同軸ケーブル
4日前
レナタ・アーゲー
電池
21日前
株式会社ExH
電流開閉装置
6日前
株式会社クオルテック
空気電池
18日前
個人
鉄心用材料とその製造方法
11日前
株式会社メルビル
ステージ
13日前
エイブリック株式会社
半導体装置
6日前
株式会社GSユアサ
蓄電装置
11日前
三洲電線株式会社
撚線
25日前
豊田鉄工株式会社
コイル部品
20日前
株式会社GSユアサ
蓄電装置
11日前
株式会社GSユアサ
蓄電装置
4日前
株式会社GSユアサ
蓄電装置
11日前
オムロン株式会社
電磁継電器
7日前
三菱電機株式会社
漏電遮断器
25日前
株式会社GSユアサ
蓄電装置
27日前
株式会社GSユアサ
蓄電装置
6日前
株式会社GSユアサ
蓄電装置
11日前
株式会社GSユアサ
蓄電装置
11日前
中国電力株式会社
移動用変圧器
20日前
トヨタ自動車株式会社
電源装置
6日前
オムロン株式会社
スイッチ装置
4日前
住友電装株式会社
端子台
5日前
日星電気株式会社
ケーブルアセンブリ
5日前
東洋電装株式会社
操作装置
7日前
トヨタ自動車株式会社
電池パック
28日前
中国電力株式会社
断路器操作構造
7日前
住友電装株式会社
コネクタ
11日前
株式会社GSユアサ
極板積層装置
27日前
トヨタ自動車株式会社
電池パック
6日前
トヨタ自動車株式会社
電池パック
6日前
住友電装株式会社
コネクタ
11日前
ローム株式会社
チップ部品
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ