TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025094184
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2025048948,2023222577
出願日
2025-03-24,2020-01-15
発明の名称
移動体検出装置、移動体検出方法、プログラム、及び記憶媒体
出願人
パイオニア株式会社
,
パイオニアスマートセンシングイノベーションズ株式会社
代理人
個人
,
個人
主分類
G01S
17/894 20200101AFI20250617BHJP(測定;試験)
要約
【課題】物体の裏側に移動体が移動したことを検知する。
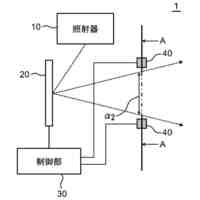
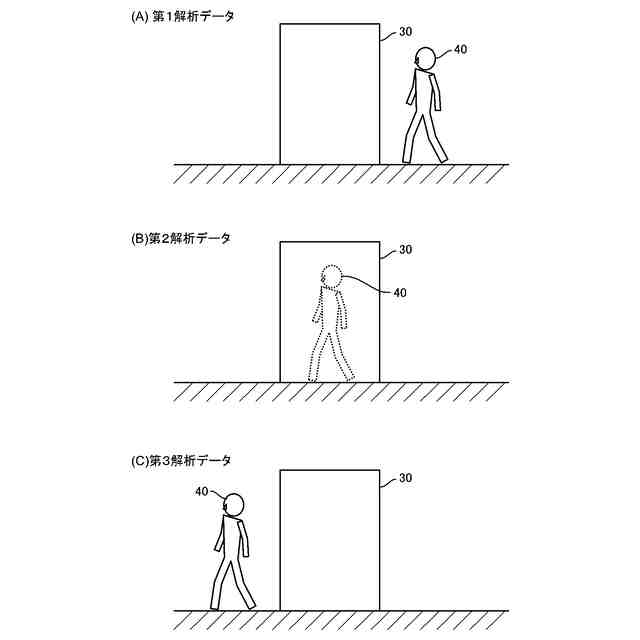
【解決手段】対象領域に照射された電磁波の反射波を解析することにより生成され、第1タイミングにおける電磁波の反射点の3次元分布を示す第1測定データと、第1タイミングより後である第2タイミングにおける第2測定データと、を取得する測定データ取得部と、第1測定データを処理することにより、第1タイミングにおいて対象領域に移動体があった時に当該移動体の位置が特定可能な第1解析データを生成するとともに、第2測定データを処理することにより、第2解析データを生成する測定データ解析部と、対象領域のうち電磁波が届かないとされる領域である非測定領域を特定可能な非測定領域特定情報、第1解析データ、及び第2解析データを用いて、第2タイミングにおいて非測定領域に位置すると推定される移動体を検出する非測定領域処理部と、を備える移動体検出装置。
【選択図】図1
特許請求の範囲
【請求項1】
対象領域に照射された電磁波の反射波を解析することにより生成され、第1タイミングにおける前記電磁波の反射点の3次元分布を示す第1測定データと、前記第1タイミングより後である第2タイミングにおける前記電磁波の前記反射点の3次元分布を示す第2測定データと、を取得する測定データ取得部と、
前記第1測定データを処理することにより、前記第1タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第1解析データを生成するとともに、前記第2測定データを処理することにより、前記第2タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第2解析データを生成する測定データ解析部と、
前記対象領域のうち前記電磁波が届かないとされる領域である非測定領域を特定可能な非測定領域特定情報、前記第1測定データ、及び前記第2測定データを用いて、前記第2タイミングにおいて前記非測定領域に位置すると推定される移動体を検出する非測定領域処理部とを備える移動体検出装置。
続きを表示(約 2,300 文字)
【請求項2】
請求項1に記載の移動体検出装置において、
前記非測定領域処理部は、前記第1解析データにおいて前記非測定領域から第1基準距離以内に移動体が検知されており、かつ、前記第2解析データにおいて当該移動体の少なくとも一部が検知されなかった場合、前記第2タイミングにおいて当該移動体の少なくとも一部が前記非測定領域に位置すると推定する移動体検出装置。
【請求項3】
請求項2に記載の移動体検出装置において、
前記非測定領域処理部は、前記第1解析データにおいて、前記反射波を受信する受信部を起点とした場合、前記移動体が、前記非測定領域の生成原因となる前記反射点より遠方に位置する場合に、前記第2タイミングにおいて前記移動体の少なくとも一部が前記非測定領域に位置すると推定する移動体検出装置。
【請求項4】
請求項2又は3に記載の移動体検出装置において、
前記測定データ取得部は、前記第2タイミングより後である第3タイミングにおける前記反射点の3次元分布を示す第3測定データを取得し、
前記測定データ解析部は、前記第3測定データを処理することにより、前記第3タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第3解析データを生成し、
前記非測定領域処理部は、前記第2タイミングにおいて前記移動体が前記非測定領域に位置すると推定し、かつ、前記第3タイミングにおいて前記非測定領域から第2基準距離以内に移動体が検知された場合において、前記第2タイミングにおいて前記非測定領域に位置していた前記移動体が前記第3タイミングにおいて前記非測定領域から出てきていると推定する移動体検出装置。
【請求項5】
請求項4に記載の移動体検出装置において、
前記第1測定データおよび前記第3測定データは、いずれも前記移動体による前記反射波の強度を含んでおり、
前記非測定領域処理部は、前記第1測定データに含まれる前記移動体による前記反射波の強度と、前記第3測定データに含まれる前記移動体による前記反射波の強度の差が基準以下の場合に、前記第2タイミングにおいて前記非測定領域に位置していた前記移動体が前記第3タイミングにおいて前記非測定領域から出てきていると推定する移動体検出装置。
【請求項6】
請求項4に記載の移動体検出装置において、
前記第1測定データおよび前記第3測定データは、いずれも前記移動体による前記反射波の強度を含んでおり、
前記非測定領域処理部は、前記第1測定データに含まれる前記移動体による前記反射波の強度と、前記第3測定データに含まれる前記移動体による前記反射波の強度の差が基準以上の場合に、警告処理を行う移動体検出装置。
【請求項7】
請求項4~6のいずれか一項に記載の移動体検出装置において、
前記第1解析データおよび前記第3解析データは、いずれも前記移動体の形状が特定可能なデータを含んでおり、
前記非測定領域処理部は、前記第1解析データによって特定される前記移動体の形状と、前記第3解析データによって特定される前記移動体の形状との差が基準以上の場合に、警告処理を行う移動体検出装置。
【請求項8】
コンピュータが、
対象領域に照射された電磁波の反射波を解析することにより生成され、第1タイミングにおける前記電磁波の反射点の3次元分布を示す第1測定データと、前記第1タイミングより後である第2タイミングにおける前記電磁波の前記反射点の3次元分布を示す第2測定データと、を取得し、
前記第1測定データを処理することにより、前記第1タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第1解析データを生成するとともに、前記第2測定データを処理することにより、前記第2タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第2解析データを生成し、
前記対象領域のうち前記電磁波が届かないとされる領域である非測定領域を特定可能な非測定領域特定情報、前記第1解析データ、及び前記第2解析データを用いて、前記第2タイミングにおいて前記非測定領域に位置すると推定される移動体を検出する、移動体検出方法。
【請求項9】
コンピュータに、
対象領域に照射された電磁波の反射波を解析することにより生成され、第1タイミングにおける前記電磁波の反射点の3次元分布を示す第1測定データと、前記第1タイミングより後である第2タイミングにおける前記電磁波の前記反射点の3次元分布を示す第2測定データと、を取得する機能と、
前記第1測定データを処理することにより、前記第1タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第1解析データを生成するとともに、前記第2測定データを処理することにより、前記第2タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第2解析データを生成する機能と、
前記対象領域のうち前記電磁波が届かないとされる領域である非測定領域を特定可能な非測定領域特定情報、前記第1解析データ、及び前記第2解析データを用いて、前記第2タイミングにおいて前記非測定領域に位置すると推定される移動体を検出する機能と、
を持たせるプログラム。
【請求項10】
請求項9に記載のプログラムを記憶する記憶媒体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体検出装置、移動体検出方法、プログラム、及び記憶媒体に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年、光などの電磁波を走査しながら照射し、この電磁波の反射波を解析することにより、物体や人などを検出することが行われている。この方法は、例えば特許文献1に記載されているように、車両の自動運転を支援するために用いられることが多い。
【先行技術文献】
【特許文献】
【0003】
国際公開第2016/152873号
【発明の概要】
【発明が解決しようとする課題】
【0004】
電磁波の反射波を解析することにより人などの移動体を検出する場合、物体の裏側に移動体が移動してしまうと、当該移動体に起因した反射波を得ることができなくなるため、その移動体を検知できなくなる。
【0005】
本発明が解決しようとする課題は、物体の裏側に移動体が移動したことを検知することが一例として挙げられる。
【課題を解決するための手段】
【0006】
請求項1に記載の発明は、対象領域に照射された電磁波の反射波を解析することにより生成され、第1タイミングにおける前記電磁波の反射点の3次元分布を示す第1測定データと、前記第1タイミングより後である第2タイミングにおける前記電磁波の前記反射点の3次元分布を示す第2測定データと、を取得する測定データ取得部と、
前記第1測定データを処理することにより、前記第1タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第1解析データを生成するとともに、前記第2測定データを処理することにより、前記第2タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第2解析データを生成する測定データ解析部と、
前記対象領域のうち前記電磁波が届かないとされる領域である非測定領域を特定可能な非測定領域特定情報、前記第1解析データ、及び前記第2解析データを用いて、前記第2タイミングにおいて前記非測定領域に位置すると推定される移動体を検出する非測定領域処理部と、
を備える移動体検出装置である。
【0007】
請求項8に記載の発明は、コンピュータが、
対象領域に照射された電磁波の反射波を解析することにより生成され、第1タイミングにおける前記電磁波の反射点の3次元分布を示す第1測定データと、前記第1タイミングより後である第2タイミングにおける前記電磁波の前記反射点の3次元分布を示す第2測定データと、を取得し、
前記第1測定データを処理することにより、前記第1タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第1解析データを生成するとともに、前記第2測定データを処理することにより、前記第2タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第2解析データを生成し、
前記対象領域のうち前記電磁波が届かないとされる領域である非測定領域を特定可能な非測定領域特定情報、前記第1解析データ、及び前記第2解析データを用いて、前記第2タイミングにおいて前記非測定領域に位置すると推定される移動体を検出する、移動体検出方法である。
【0008】
請求項9に記載の発明は、コンピュータに、
対象領域に照射された電磁波の反射波を解析することにより生成され、第1タイミングにおける前記電磁波の反射点の3次元分布を示す第1測定データと、前記第1タイミングより後である第2タイミングにおける前記電磁波の前記反射点の3次元分布を示す第2測定データと、を取得する機能と、
前記第1測定データを処理することにより、前記第1タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第1解析データを生成するとともに、前記第2測定データを処理することにより、前記第2タイミングにおいて前記対象領域に移動体があった時に当該移動体の位置が特定可能な第2解析データを生成する機能と、
前記対象領域のうち前記電磁波が届かないとされる領域である非測定領域を特定可能な非測定領域特定情報、前記第1解析データ、及び前記第2解析データを用いて、前記第2タイミングにおいて前記非測定領域に位置すると推定される移動体を検出する機能と、
を持たせるプログラムである。
請求項10に記載の発明は、上記プログラムを記憶した記憶媒体である。
【図面の簡単な説明】
【0009】
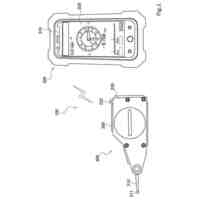
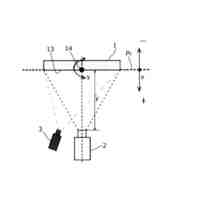
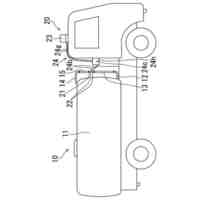
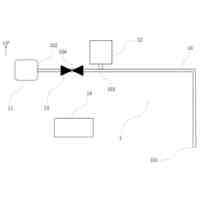
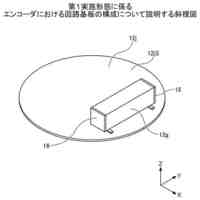
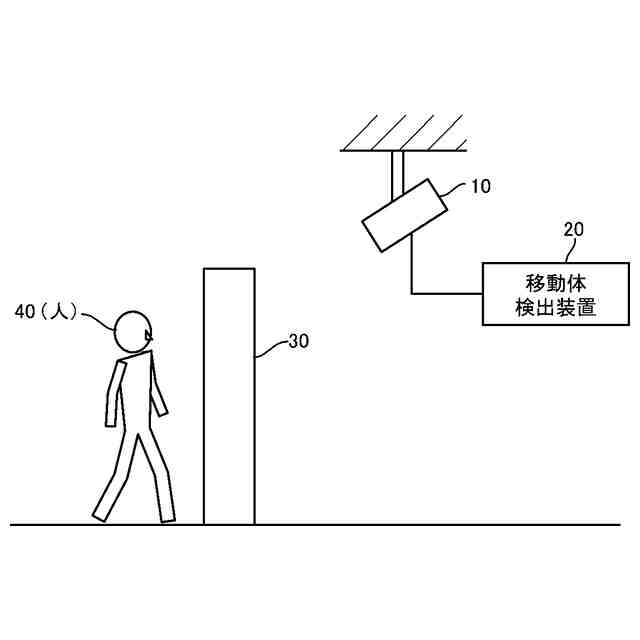
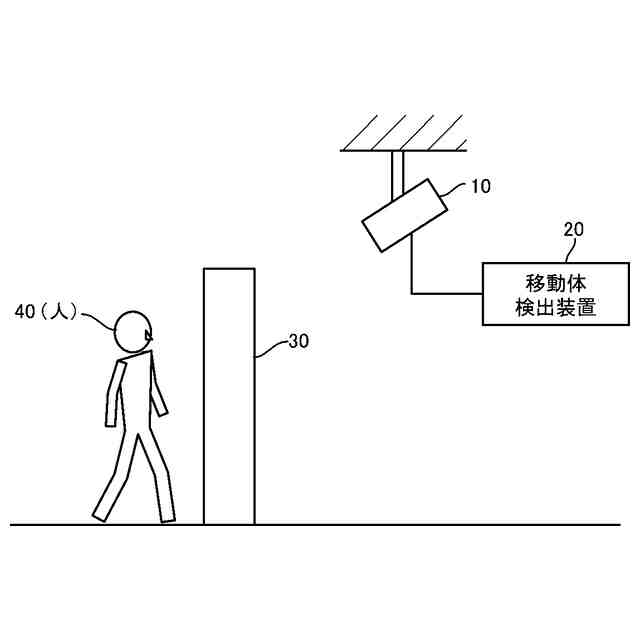
実施形態に係る移動体検出装置の使用環境を説明するための図である。
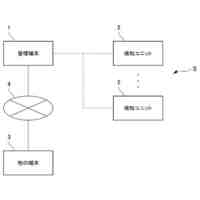
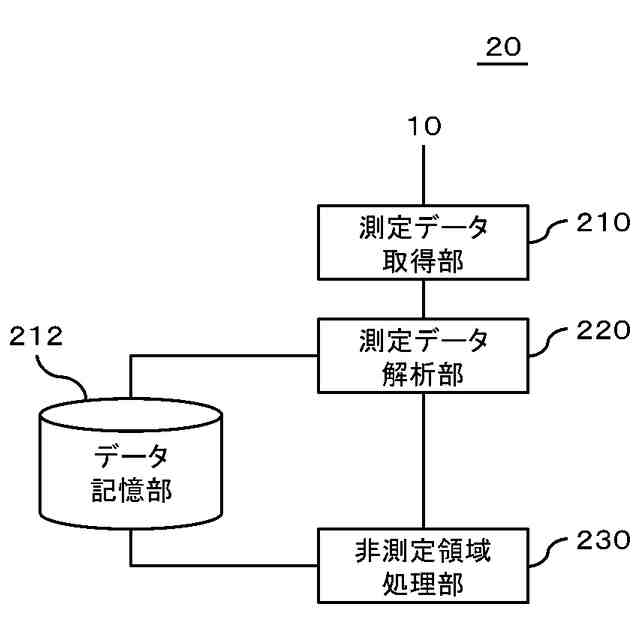
移動体検出装置の機能構成の一例を示す図である。
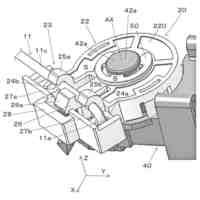
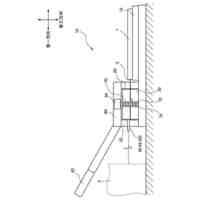
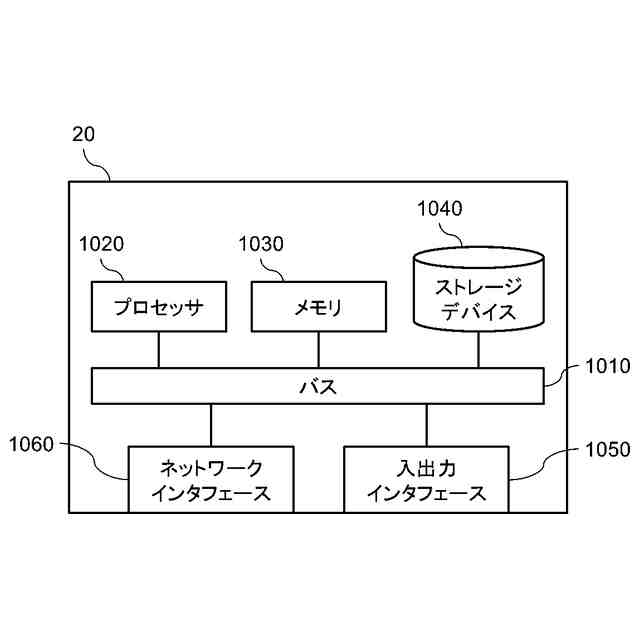
移動体検出装置のハードウェア構成例を示す図である。
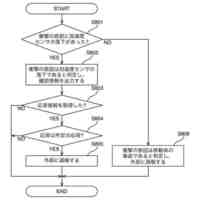
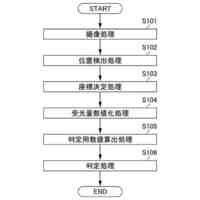
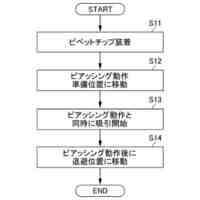
移動体検出装置が行う処理の一例を説明するためのフローチャートである。
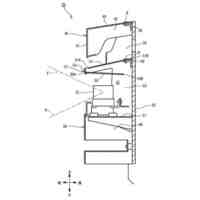
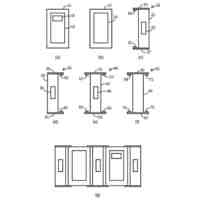
非測定領域処理部が行う処理を説明するための図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態について、図面を用いて説明する。尚、すべての図面において、同様な構成要素には同様の符号を付し、適宜説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
パイオニア株式会社
測定装置
10日前
パイオニア株式会社
情報処理装置
5日前
パイオニア株式会社
情報処理装置
5日前
日本精機株式会社
計器装置
1か月前
株式会社東光高岳
計器
28日前
日本精機株式会社
液面検出装置
1か月前
株式会社ミツトヨ
測定器
25日前
株式会社豊田自動織機
産業車両
3日前
大和製衡株式会社
組合せ秤
1か月前
個人
センサーを備えた装置
今日
大和製衡株式会社
組合せ秤
1か月前
大和製衡株式会社
組合せ秤
1か月前
株式会社国際電気
試験装置
10日前
日本精機株式会社
施工管理システム
今日
大同特殊鋼株式会社
疵検出方法
25日前
ダイハツ工業株式会社
試験用治具
1か月前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社田中設備
報知装置
4日前
エグゼヴィータ株式会社
端末装置
26日前
日本特殊陶業株式会社
ガスセンサ
1か月前
株式会社CAST
センサ固定治具
3日前
日本特殊陶業株式会社
ガスセンサ
26日前
日本特殊陶業株式会社
ガスセンサ
26日前
柳井電機工業株式会社
部材検査装置
26日前
株式会社クボタ
作業車
1か月前
WOTA株式会社
液位検出システム
10日前
タカノ株式会社
試料分析装置
25日前
タカノ株式会社
試料分析装置
25日前
富士電機株式会社
エンコーダ
27日前
バイオテック株式会社
容器設置装置
26日前
株式会社熊平製作所
刃物類判別装置
3日前
富士電機株式会社
エンコーダ
27日前
日本装置開発株式会社
X線検査装置
13日前
オムロン株式会社
スイッチング装置
10日前
JNC株式会社
トランジスタ型センサ
25日前
JNC株式会社
トランジスタ型センサ
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ