TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025088664
公報種別
公開特許公報(A)
公開日
2025-06-11
出願番号
2023203489
出願日
2023-11-30
発明の名称
ハンド、搬送装置、及び被搬送物の搬送方法
出願人
平田機工株式会社
代理人
個人
主分類
H01L
21/677 20060101AFI20250604BHJP(基本的電気素子)
要約
【課題】反りが生じた被搬送物であっても吸着保持することができるパッドを用いたハンド、そのハンドを装着する搬送装置、及び搬送装置を用いた被搬送物の搬送方法を提供する。
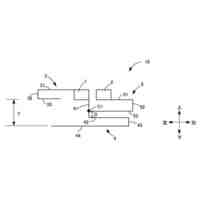
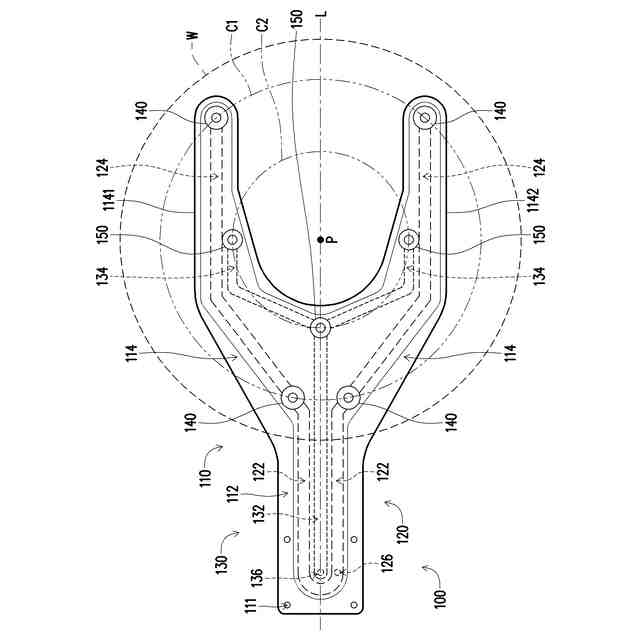
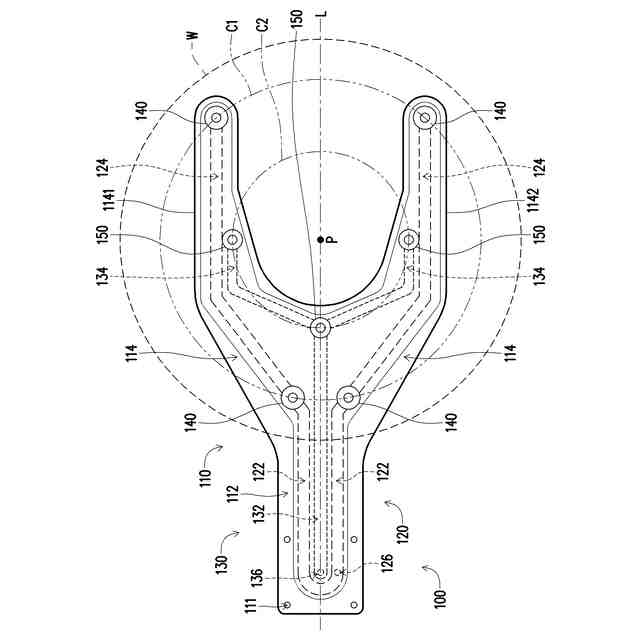
【解決手段】本発明のハンドは、ハンド本体と、第1通気路と、第2通気路と、第1通気路と連通し、被搬送物を吸着する第1パッドと、第2通気路と連通し、被搬送物を吸引する第2パッドと、を備え、第1パッド及び第2パッドは、ハンド本体に複数設けられ、且つ第1パッドは、第2パッドよりも吸引量が小さい。搬送装置は、上記のハンドと、搬送ロボットと、第1通気路及び第2通気路のそれぞれの連通状態を切り換える切換部と、制御部と、を備える。また、被搬送物の搬送方法は、上記の搬送装置によって実行され、被搬送物を吸引する吸引工程と、被搬送物を吸着保持した後、第2通気路を遮断状態へ移行させる遮断工程と、被搬送物を搬送する搬送工程と、を含む。
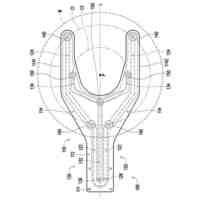
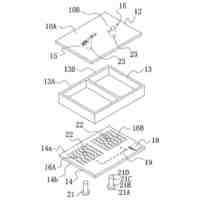
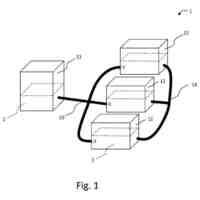
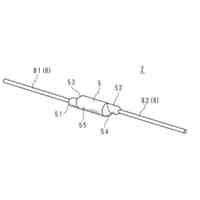
【選択図】図1
特許請求の範囲
【請求項1】
搬送装置に装着され、被搬送物を保持するハンドであって、
ハンド本体と、
真空源に接続される第1通気路と、
前記真空源に接続される第2通気路と、
前記第1通気路と連通し、前記被搬送物を吸着する第1パッドと、
前記第2通気路と連通し、前記被搬送物を吸引する第2パッドと、を備え、
前記第1パッド及び前記第2パッドは、前記ハンド本体に複数設けられ、
前記第1パッドは、前記第2パッドよりも吸引量が小さい
ことを特徴とするハンド。
続きを表示(約 1,200 文字)
【請求項2】
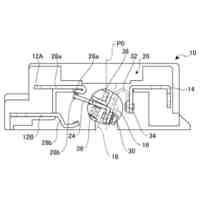
前記ハンド本体は、前記第1パッドが設置される複数の第1設置部と、前記第2パッドが設置される複数の第2設置部と、を更に備え、
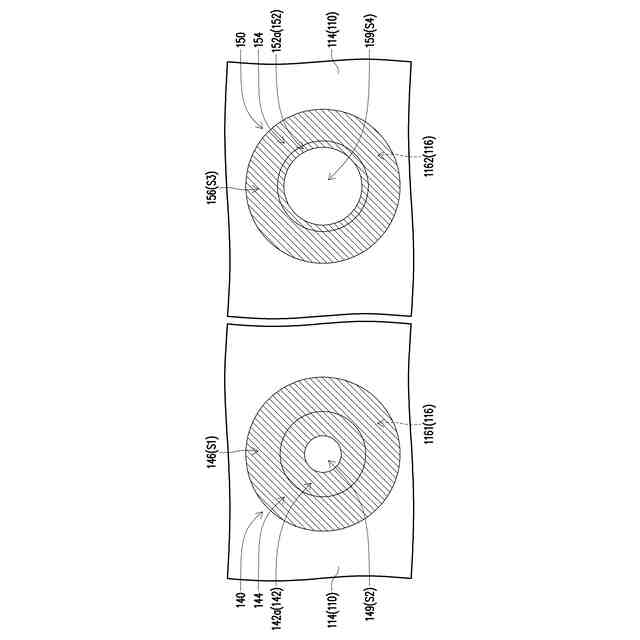
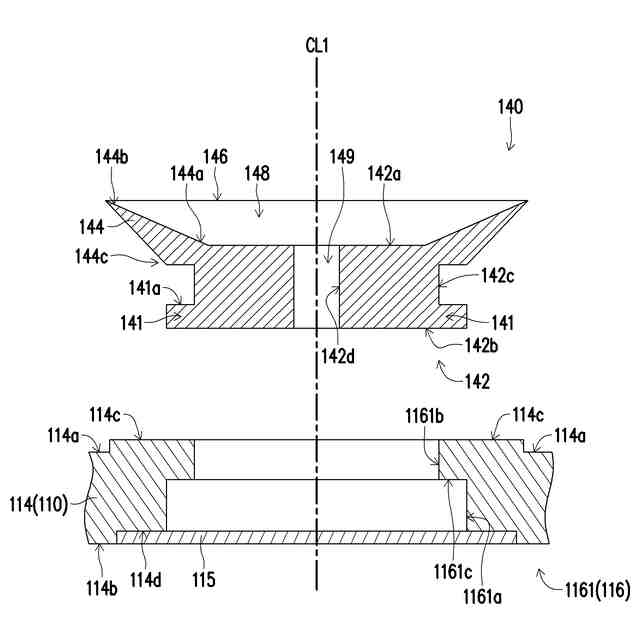
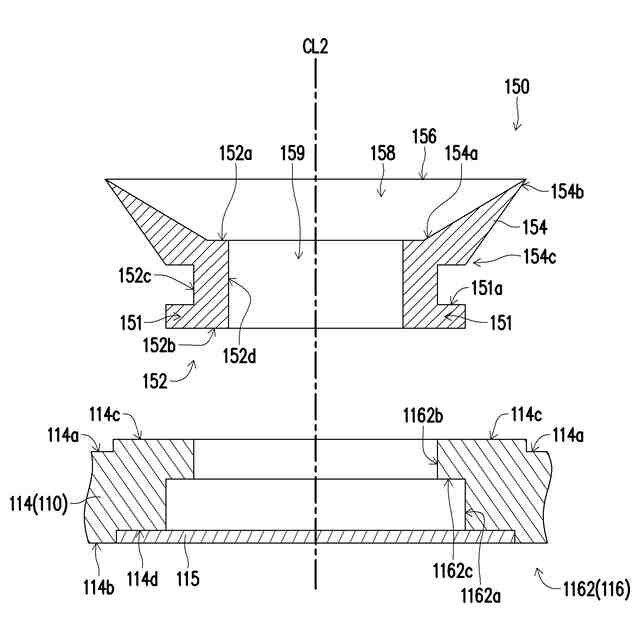
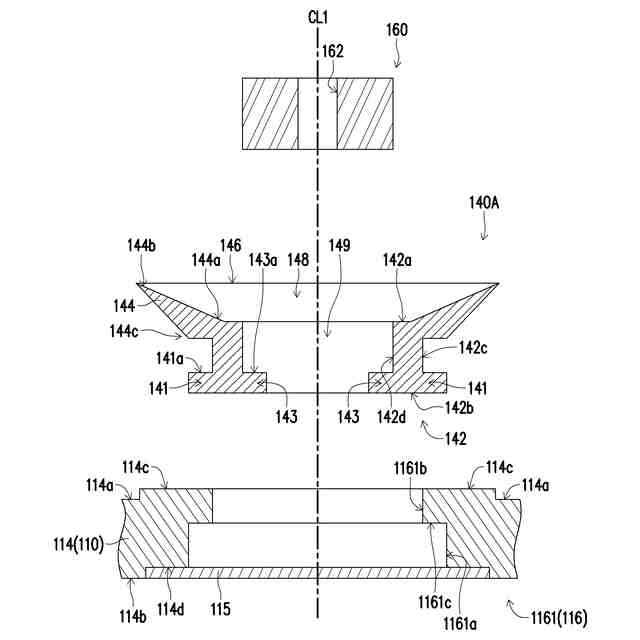
前記第1パッドは、中空形状であり、前記第1設置部と係合する第1係合部と、前記第1係合部から延在する第1延在部と、前記第1通気路と連通する第1貫通孔を有し、
前記第2パッドは、中空形状であり、前記第2設置部と係合する第2係合部と、前記第2係合部から延在する第2延在部と、前記第2通気路と連通する第2貫通孔を有する
ことを特徴とする請求項1に記載のハンド。
【請求項3】
前記第2延在部は、前記第2延在部の端部が、前記第1延在部の端部よりも前記ハンド本体の上面から離間する第1位置と、前記第1延在部の端部よりも前記ハンド本体の上面へ接近する第2位置とで変位可能に構成される
ことを特徴とする請求項2に記載のハンド。
【請求項4】
前記第1貫通孔の面積は、前記第2貫通孔の面積よりも小さい
ことを特徴とする請求項2に記載のハンド。
【請求項5】
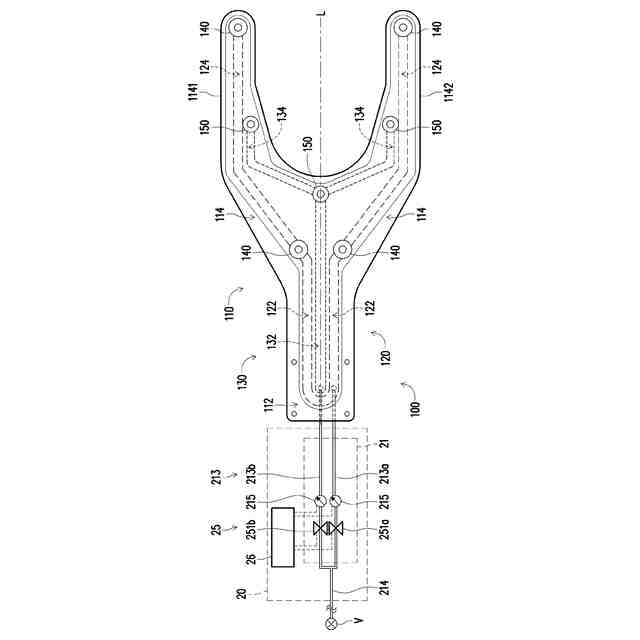
前記ハンド本体は、
前記第1通気路と前記真空源とを接続する第1接続孔と、前記第2通気路と前記真空源とを接続する第2接続孔と、が設けられる基部と、
前記基部から二股に分かれて延在する第1フィンガ部と第2フィンガ部とを含むハンド部とを有し、
前記第1パッドと前記第2パッドは、前記第1フィンガ部と前記第2フィンガ部とのそれぞれに設けられる
ことを特徴とする請求項1に記載のハンド。
【請求項6】
前記第2パッドは、前記ハンド本体において、同一円周上に3つ配置される
ことを特徴とする請求項1記載のハンド。
【請求項7】
前記第2パッドは、前記ハンド本体の延伸方向に沿って延伸する中心線に位置する基準点を中心とした同一円周上に配置される
ことを特徴とする請求項1に記載のハンド。
【請求項8】
前記ハンド本体は、前記ハンド本体の延伸方向に沿って延伸する中心線に位置する基準点に近い内側と、前記基準点から離れる外側を有し、
前記第2パッドは、前記ハンド本体において、前記第1パッドよりも前記内側に設けられる
ことを特徴とする請求項1に記載のハンド。
【請求項9】
前記第1通気路と前記第2通気路は、互いに連通しないように前記ハンド本体の異なる位置に形成され、且つ
前記第1通気路は、前記第2通気路よりも前記外側に形成される
ことを特徴とする請求項8に記載のハンド。
【請求項10】
前記第1通気路と前記第2通気路は、互いに連通しないように前記ハンド本体の異なる位置に形成される
ことを特徴とする請求項1に記載のハンド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ハンド、搬送装置、及び被搬送物の搬送方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
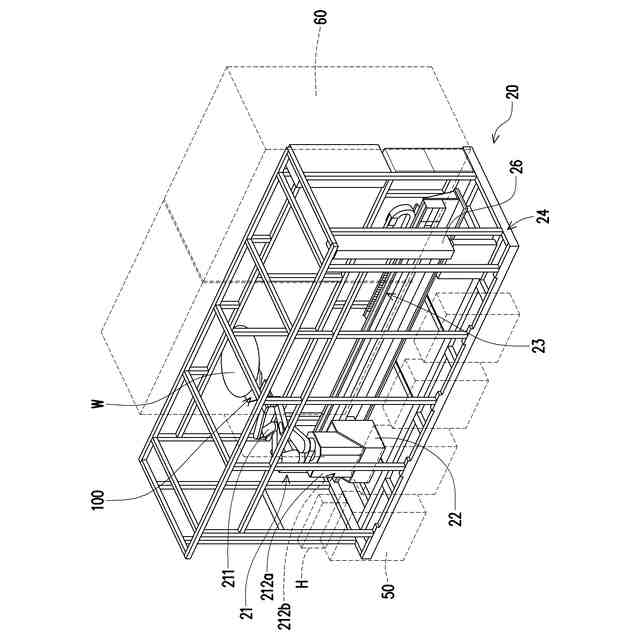
従来から、半導体等の製造分野において、FOUP(Front Opening Unified Pod)と呼ばれる収容容器に収容されている被搬送物(例えば、ウエハ、ガラス基板等)を、搬送装置によりFOUPから種々の処理装置に搬送し、搬送された被搬送物に対して処理を行う技術が存在している。そのうち、搬送装置は、搬送機構として、昇降且つ水平自在に移動可能なロボットアームと、ロボットアームに装着され被搬送物を吸着保持するパッド等の吸着部材を有するハンドと、からなる搬送ロボットを備える。例えば、搬送ロボットによる被搬送物の搬送方法としては、ハンドによって被搬送物を吸着保持した状態でロボットアームを移動させることで、収容容器から被搬送物を取り出す方法が知られている。
【0003】
被搬送物に反りやひずみが生じていると、吸着保持した状態で搬送する際、一部のパッドと被搬送物とが非接触になる可能性がある。この場合、パッドと被搬送物との隙間から空気が流入し吸気圧力が低下するため、パッドの被搬送物を吸着保持する力(以下、保持力)が低下する恐れがある。そこで、特許文献1では、パッドのエア流路を微細径に設定し、パッドが単位時間あたりに吸引する空気の量(吸引量)を意図的に抑制することで、パッドと被搬送物との隙間から単位時間あたりに流入する空気の量を抑制し、吸気圧力の低下を抑制するハンドが提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-51595号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のハンドは、パッドの空気の吸引量が小さくなるため、被搬送物をパッドに引き付ける力(以下、吸引力)が減少する。この場合、パッドは、被搬送物をパッドの吸着面まで引き寄せることができず、被搬送物を吸着保持するパッドの総数が少なくなり、十分な保持力を得られない恐れがある。
【0006】
以上より、被搬送物とパッドの隙間から空気の流入を抑制しつつ、パッドの吸引力を確保して被搬送物を吸着保持することができるハンド、そのハンドを装着する搬送装置、及び搬送装置を用いた被搬送物の搬送方法が求められる。
【0007】
そこで本発明は、反りが生じた被搬送物であっても吸着保持することができるパッドを用いたハンド、そのハンドを装着する搬送装置、及び搬送装置を用いた被搬送物の搬送方法を提供する。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明によれば、搬送装置に装着され、被搬送物を保持するハンドであって、ハンド本体と、真空源に接続される第1通気路と、前記真空源に接続される第2通気路と、前記第1通気路と連通し、前記被搬送物を吸着する第1パッドと、前記第2通気路と連通し、前記被搬送物を吸引する第2パッドと、を備え、前記第1パッド及び前記第2パッドは、前記ハンド本体に複数設けられ、前記第1パッドは、前記第2パッドよりも吸引量が小さいことを特徴とするハンドが提供される。
【0009】
上記目的を達成するために、本発明によれば、前記ハンドと、前記ハンドを自在に移動させる搬送ロボットと、前記第1通気路及び前記第2通気路のそれぞれの連通状態を切り換える切換部と、前記切換部を制御する制御部と、を備え、前記切換部は、前記真空源による空気の吸引力が及ぼされている吸引状態と前記真空源による空気の吸引力が及ぼされていない遮断状態とで連通状態を切り換えることを特徴とする搬送装置が提供される。
【0010】
上記目的を達成するために、本発明によれば、被搬送物を保持するハンドを備える搬送装置による被搬送物の搬送方法であって、前記ハンドは、ハンド本体と、真空源に接続される第1通気路と、前記真空源に接続される第2通気路と、前記第1通気路と連通し、前記被搬送物を吸着する第1パッドと、前記第2通気路と連通し、前記被搬送物を吸引する第2パッドと、を備え、前記第1パッド及び前記第2パッドは、前記ハンド本体に複数設けられ、前記第1パッドが、前記第2パッドよりも吸引量が小さく、前記被搬送物の搬送方法は、前記第1通気路と連通する前記第1パッド及び前記第2通気路と連通する前記第2パッドによって前記被搬送物を吸引する吸引工程と、前記被搬送物を吸着保持した後、前記第2通気路を遮断状態へ移行させる遮断工程と、前記被搬送物を所定位置まで搬送する搬送工程と、を含むことを特徴とする被搬送物の搬送方法が提供される。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
平田機工株式会社
ハンド、搬送装置、及び被搬送物の搬送方法
6日前
APB株式会社
二次電池
5日前
株式会社電知
組電池の製造方法
12日前
ローム株式会社
半導体装置
6日前
株式会社コロナ
タッチ式操作装置
15日前
株式会社GSユアサ
蓄電装置
今日
太陽誘電株式会社
コイル部品
6日前
株式会社GSユアサ
蓄電装置
12日前
株式会社高田製作所
電源切替器
6日前
トヨタ自動車株式会社
二次電池
7日前
トヨタ自動車株式会社
二次電池
18日前
株式会社村田製作所
電池
6日前
矢崎総業株式会社
コネクタ
7日前
株式会社不二越
ソレノイド
11日前
株式会社ダイヘン
搬送装置
18日前
株式会社ダイヘン
ヒューズ
15日前
トヨタ自動車株式会社
電池パック
1日前
ローム株式会社
半導体装置
20日前
株式会社GSユアサ
極板積層装置
今日
株式会社半導体エネルギー研究所
二次電池
12日前
株式会社ニフコ
構造体
5日前
TDK株式会社
電子部品
6日前
TDK株式会社
電子部品
6日前
トヨタバッテリー株式会社
電池パック
11日前
イビデン株式会社
電子部品搭載用基板
19日前
日本板硝子株式会社
車両用のガラス体
12日前
TDK株式会社
電子部品
6日前
日亜化学工業株式会社
発光素子
15日前
矢崎総業株式会社
コネクタ
1日前
株式会社安川電機
ロボット
12日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
電池パック
6日前
新光電気工業株式会社
半導体装置
7日前
太陽誘電株式会社
全固体電池の試験方法
7日前
Rapidus株式会社
電子装置
6日前
トヨタ自動車株式会社
電池パック
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ