TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025087311
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201876
出願日
2023-11-29
発明の名称
ロボットの制御方法及び制御装置
出願人
ニデックインスツルメンツ株式会社
代理人
個人
,
個人
主分類
B25J
9/06 20060101AFI20250603BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】旋回するスイングアームと、スイングアームに取り付けられた共通アームと、共通アームの両端にそれぞれ先端アームを介してハンドが取り付けられているロボットにおいて、アクセスポイント間でのロボットの移動完了までの時間を短縮する。
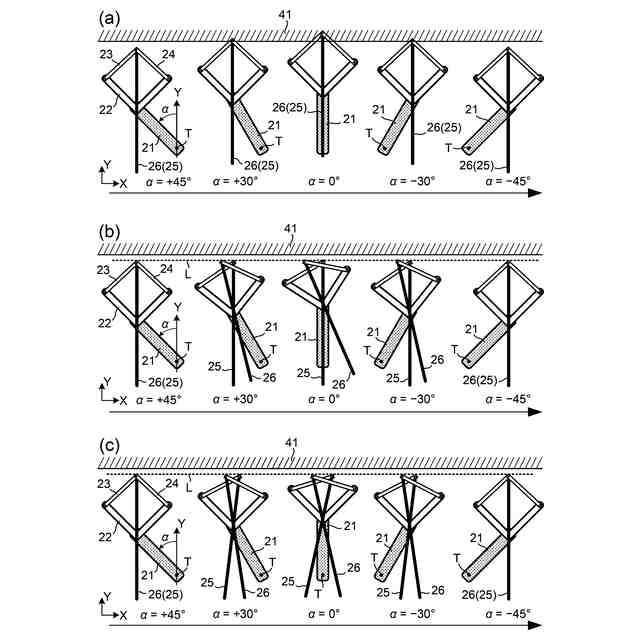
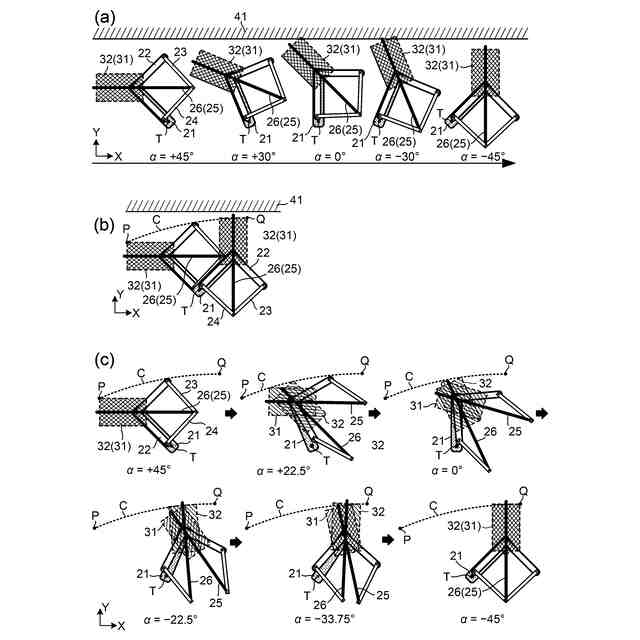
【解決手段】ハンド25,26が相互に重なり合って第1の方向を向いている起点アクセスポイントから、ハンド25,ハンド26が相互に重なり合って第2の方向を向いている終点アクセスポイントへと、軸Tの周りでスイングアーム21を回転させてロボットが移動するときに、ハンド26の先端が経路L上にありかつハンド26の向きの変化が指定されている連続経路(CP)動作によってハンド26を移動させる制御を行い、もう1つのハンド25についても先端が経路L上にあるように制御する。
【選択図】図3
特許請求の範囲
【請求項1】
第1の軸に基端が接続して前記第1の軸の周りで回転可能なスイングアームと、第2の軸を介して前記スイングアームの先端に接続して前記第2の軸の周りで回転可能な共通アームと、基端が第3の軸を介して前記共通アームの一方の先端に接続して前記第3の軸の周りで回転可能な第1先端アームと、基端が第4の軸を介して前記共通アームの他方の先端に接続して前記第4の軸の周りで回転可能な第2先端アームと、基端が第5の軸を介して前記第1先端アームの先端に接続し、前記第3の軸の周りでの前記共通アームに対する前記第1先端アームの回転に連動して前記第5の軸の周りを回転する第1ハンドと、基端が第6の軸を介して前記第2先端アームの先端に接続し、前記第4の軸の周りでの前記共通アームに対する前記第2先端アームの回転に連動して前記第6の軸の周りを回転する第2ハンドと、を有し、前記第1乃至第6の軸が相互に平行であるロボットを制御するロボット制御方法であって、
前記第1ハンド及び前記第2ハンドが相互に重なり合って第1の方向を向いている起点アクセスポイントから、前記第1ハンド及び前記第2ハンドが相互に重なり合って第2の方向を向いている終点アクセスポイントへと、前記第1の軸の周りで前記スイングアームを回転させて前記ロボットが移動させるときに、
前記第1ハンドの制御対象点が所定の経路上にありかつ前記第1ハンドの向きの変化が指定されている連続経路動作によって前記第1ハンドを移動させる制御を行い、同時に前記第2ハンドの制御対象点が前記所定の経路上にあるようにする制御を行う、ロボット制御方法。
続きを表示(約 3,100 文字)
【請求項2】
第1の軸に基端が接続して前記第1の軸の周りで回転可能なスイングアームと、第2の軸を介して前記スイングアームの先端に接続して前記第2の軸の周りで回転可能な共通アームと、基端が第3の軸を介して前記共通アームの一方の先端に接続して前記第3の軸の周りで回転可能な第1先端アームと、基端が第4の軸を介して前記共通アームの他方の先端に接続して前記第4の軸の周りで回転可能な第2先端アームと、基端が第5の軸を介して前記第1先端アームの先端に接続し、前記第3の軸の周りでの前記共通アームに対する前記第1先端アームの回転に連動して前記第5の軸の周りを回転する第1ハンドと、基端が第6の軸を介して前記第2先端アームの先端に接続し、前記第4の軸の周りでの前記共通アームに対する前記第2先端アームの回転に連動して前記第6の軸の周りを回転する第2ハンドと、を有し、前記第1乃至第6の軸が相互に平行であるロボットを制御するロボット制御方法であって、
前記第1ハンド及び前記第2ハンドが相互に重なり合って第1の方向を向いている起点アクセスポイントから、前記第1ハンド及び前記第2ハンドが相互に重なり合って第2の方向を向いている終点アクセスポイントへと、前記第1の軸の周りで前記スイングアームを回転させて前記ロボットが移動させるときに、
前記第1ハンドの制御対象点と前記第2ハンドの制御対象点とが所定の経路上に存在するように1以上の経由点を定め、前記1以上の経由点を経由させて前記起点アクセスポイントから前記終点アクセスポイントまでポイント・ツー・ポイント動作で前記ロボットを移動させるロボット制御方法。
【請求項3】
前記起点アクセスポイントと前記終点アクセスポイントとの間での前記共通アームの向きの角度差に応じ、前記第1の軸の周りでの前記スイングアームの回転量に比例して前記第2の軸の周りで前記共通アームが前記スイングアームに対して回転するという第1の拘束条件と、前記第1の軸の周りでの前記スイングアームの回転角の変化と前記第3の軸の周りでの前記第1先端アームの回転角の変化と前記第4の軸の周りでの前記第2先端アームの回転角の変化とが連動するという第2の拘束条件との下で、前記ポイント・ツー・ポイント動作を実行する、請求項2に記載のロボット制御方法。
【請求項4】
前記制御対象点は、前記第1ハンド及び前記第2ハンドの各々ごとに、当該ハンド上または当該ハンドに搭載された物体上の点であって、前記起点アクセスポイントから前記終点アクセスポイントまでの前記ロボットに移動に伴って前記ロボットの周囲の物体と潜在的に衝突する可能性のある点として定められ、
前記所定の経路は、前記制御対象点が前記ロボットの周囲の物体と衝突しない経路として定められる、請求項1乃至3のいずれか1項に記載のロボット制御方法。
【請求項5】
前記第1の方向と前記第2の方向とが同じ向きであって前記所定の経路は直線である、請求項4に記載のロボット制御方法。
【請求項6】
前記第1の方向に対して前記第2の方向が直交し、前記所定の経路は曲線である、請求項4に記載のロボット制御方法。
【請求項7】
前記ロボットにおいて、前記共通アームは、前記第2の軸を介して前記スイングアームに保持される位置において屈曲したアームであって、前記第2の軸と前記第3の軸の間の距離と、前記第2の軸と前記第5の軸の間の距離とが等しく、前記第2の軸と前記第4の軸の間の距離と、前記第4の軸と前記第6の軸の距離が等しい、請求項1乃至3のいずれか1項に記載のロボット制御方法。
【請求項8】
第1の軸に基端が接続して前記第1の軸の周りで回転可能なスイングアームと、第2の軸を介して前記スイングアームの先端に接続して前記第2の軸の周りで回転可能な共通アームと、基端が第3の軸を介して前記共通アームの一方の先端に接続して前記第3の軸の周りで回転可能な第1先端アームと、基端が第4の軸を介して前記共通アームの他方の先端に接続して前記第4の軸の周りで回転可能な第2先端アームと、基端が第5の軸を介して前記第1先端アームの先端に接続し、前記第3の軸の周りでの前記共通アームに対する前記第1先端アームの回転に連動して前記第5の軸の周りを回転する第1ハンドと、基端が第6の軸を介して前記第2先端アームの先端に接続し、前記第4の軸の周りでの前記共通アームに対する前記第2先端アームの回転に連動して前記第6の軸の周りを回転する第2ハンドと、を有し、前記第1乃至第6の軸が相互に平行であるロボットを制御するロボット制御装置であって、
前記ロボットの制御に必要なパラメータを格納する記憶部と、
前記第1ハンド及び前記第2ハンドが相互に重なり合って第1の方向を向いている起点アクセスポイントから、前記第1ハンド及び前記第2ハンドが相互に重なり合って第2の方向を向いている終点アクセスポイントへと、前記第1の軸の周りで前記スイングアームを回転させて前記ロボットが移動させるときに、前記記憶部内の前記パラメータを参照して演算を行うことにより、前記第1ハンドの制御対象点が所定の経路上にありかつ前記第1ハンドの向きの変化が指定されている連続経路動作によって前記第1ハンドが移動し、同時に前記第2ハンドの制御対象点が前記所定の経路上にあるように、前記第1乃至第4の軸を制御する演算部と、
を有するロボット制御装置。
【請求項9】
第1の軸に基端が接続して前記第1の軸の周りで回転可能なスイングアームと、第2の軸を介して前記スイングアームの先端に接続して前記第2の軸の周りで回転可能な共通アームと、基端が第3の軸を介して前記共通アームの一方の先端に接続して前記第3の軸の周りで回転可能な第1先端アームと、基端が第4の軸を介して前記共通アームの他方の先端に接続して前記第4の軸の周りで回転可能な第2先端アームと、基端が第5の軸を介して前記第1先端アームの先端に接続し、前記第3の軸の周りでの前記共通アームに対する前記第1先端アームの回転に連動して前記第5の軸の周りを回転する第1ハンドと、基端が第6の軸を介して前記第2先端アームの先端に接続し、前記第4の軸の周りでの前記共通アームに対する前記第2先端アームの回転に連動して前記第6の軸の周りを回転する第2ハンドと、を有し、前記第1乃至第6の軸が相互に平行であるロボットを制御するロボット制御装置であって、
前記ロボットの制御に必要なパラメータを格納する記憶部と、
前記第1ハンド及び前記第2ハンドが相互に重なり合って第1の方向を向いている起点アクセスポイントから、前記第1ハンド及び前記第2ハンドが相互に重なり合って第2の方向を向いている終点アクセスポイントへと、前記第1の軸の周りで前記スイングアームを回転させて前記ロボットが移動させるときに、前記記憶部内の前記パラメータを参照して演算を行うことにより、前記第1ハンドの制御対象点と前記第2ハンドの制御対象点とが所定の経路上に存在するように1以上の経由点を定め、前記1以上の経由点を経由させて前記起点アクセスポイントから前記終点アクセスポイントまでポイント・ツー・ポイント動作で前記ロボットが移動するように前記第1乃至第4の軸を制御する演算部と、
を有するロボット制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークの搬送に適した産業用ロボット(以下、ロボットと称する)の制御に関し、特に、ロボットの周囲に配置される壁面などの干渉を防ぎつつ高速でロボットを動作させることができる制御方法及び制御装置に関する。
続きを表示(約 3,100 文字)
【背景技術】
【0002】
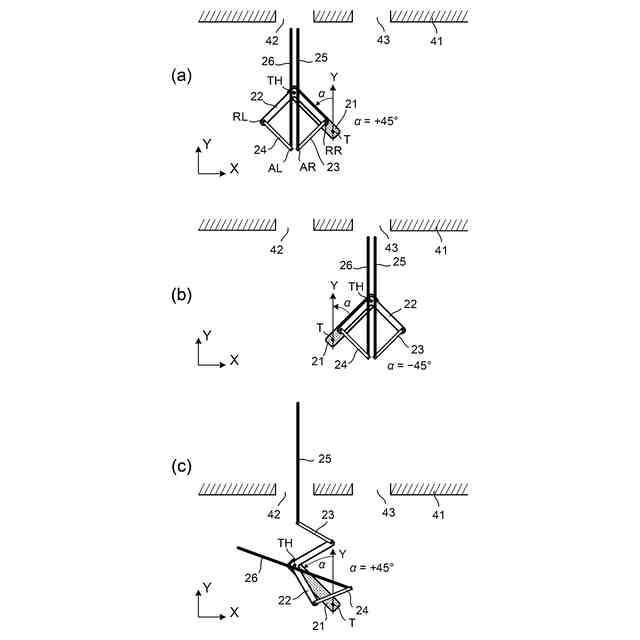
液晶表示パネルや有機EL(エレクトロルミネッセンス)表示パネルの製造では、それぞれの処理を実行するプロセスチャンバーの相互間でトランスファーチャンバーを経由して、ワークであるガラス基板を搬送する必要がある。このような目的で使用される搬送用のロボットには、例えば特許文献1に記載されるように、本体部(すなわち基台)に一端が接続されて水平面内を揺動するスイングアームと、スイングアームの他端すなわちスイングアームの先端に取り付けられたアーム群と、各アームの先端に取付られてワークを保持するハンドとを有するものがある。特に特許文献2,3には、L字形あるいはV字形に屈曲した共通アームをその中心部においてスイングアームの先端に取り付け、共通アームの両端にはそれぞれ先端アームを介してハンドが取り付けられているロボットが開示されている。ワークはハンドの上に載置されてプロセスチャンバー間で搬送される。またこれらのロボットは、スイングアームの向きがどのようなものであっても、ハンドの中心とスイングアームの先端とを結ぶ直線上をハンドが動くように構成されている。したがって、アーム群を駆動することによって、スイングアームの先端の位置に関してその位置から遠ざかりあるいはその位置に近づくようにハンドは伸縮する。プロセスチャンバーの搬出入口がトランスファーチャンバー内に開口するようにトランスファーチャンバーに隣接しており、ロボットは、まずプロセスチャンバーの前面の位置であるアクセスポイントにハンドを移動させ、その後、アクセスポイントからプロセスチャンバーの搬出入口にハンドを出し入れすることにより、プロセスチャンバー内にワークを配置したり、プロセスチャンバーからワークを取り出したりすることができる。
【先行技術文献】
【特許文献】
【0003】
特開2016-207938号公報
特開2023-54397号公報
特開2023-54938号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
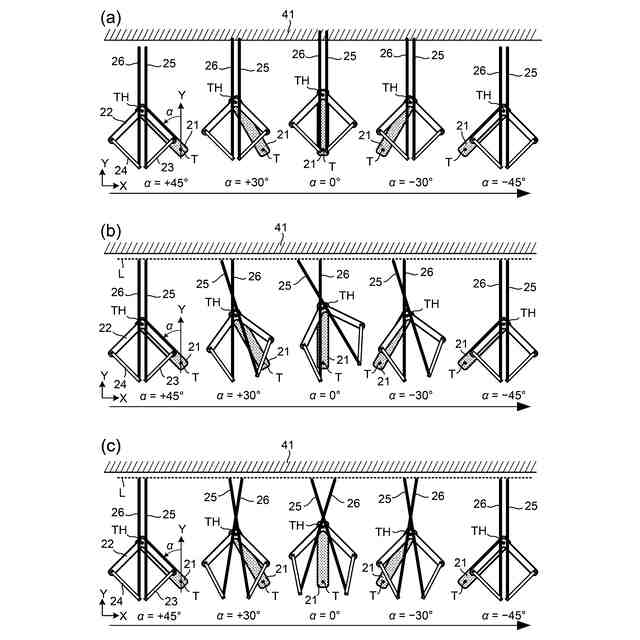
特許文献1-3に記載された搬送用のロボットを用いてプロセスチャンバー間でワークの搬送を行うときは、起点及び終点となるそれぞれのプロセスチャンバーの位置に応じてロボットのスイングアームも旋回する。その一方で、プロセスチャンバーに対してハンドを出し入れするときの移動距離を小さくするためにもトランスファーチャンバーの大きさは可能な限り小さくされるので、ある姿勢から別の姿勢へとロボットを移動させるときにハンドあるいはハンドに載置されているワークがトランスファーチャンバーの壁面に衝突するおそれが生じる。ロボットの移動中にハンドまたはワークがロボットの周囲の物体、例えば壁面と衝突するすなわち干渉することを防ぐためには、従来、ロボットの移動に際し、まずスイングアームの回転の外側方向にはハンドが大きく飛び出さないように、スイングアームを固定したまま共通アームを回転させてハンドの位置と向きを変える。その後、周囲の空間すなわちトランスファーチャンバーに対するハンドの向きが変わらないようにしたままスイングアームを所望の角度回転させ、スイングアームの回転終了後にハンドの位置と向きとが所望のものとなるようにロボットを制御している。しかしながらこのようにロボットの制御を行うときは、ハンドの向きをトランスファーチャンバーに対して相対的に変える操作とスイングアーム自体を回転させる操作とを別々の期間に行っているので、全体として、移動完了までの時間が長くなる、という課題が生じる。
【0005】
本発明の目的は、衝突などを防ぎつつ、スイングアーム自体を回転させる操作と周囲の空間に対してハンドの向きを相対的に動かす操作とを同時に実行してアクセスポイント間でのロボットの移動完了までの時間を短縮することができるロボット制御方法及びロボット制御装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明に基づくロボット制御方法及び制御装置が対象とするロボットは、例えば、第1の軸に基端が接続して第1の軸の周りで回転可能なスイングアームと、第2の軸を介してスイングアームの先端に接続して第2の軸の周りで回転可能な共通アームと、基端が第3の軸を介して共通アームの一方の先端に接続して第3の軸の周りで回転可能な第1先端アームと、基端が第4の軸を介して共通アームの他方の先端に接続して第4の軸の周りで回転可能な第2先端アームと、基端が第5の軸を介して第1先端アームの先端に接続し、第3の軸の周りでの共通アームに対する第1先端アームの回転に連動して第5の軸の周りを回転する第1ハンドと、基端が第6の軸を介して第2先端アームの先端に接続し、第4の軸の周りでの共通アームに対する第2先端アームの回転に連動して第6の軸の周りを回転する第2ハンドと、を有し、第1乃至第6の軸が相互に平行であるロボットである。
【0007】
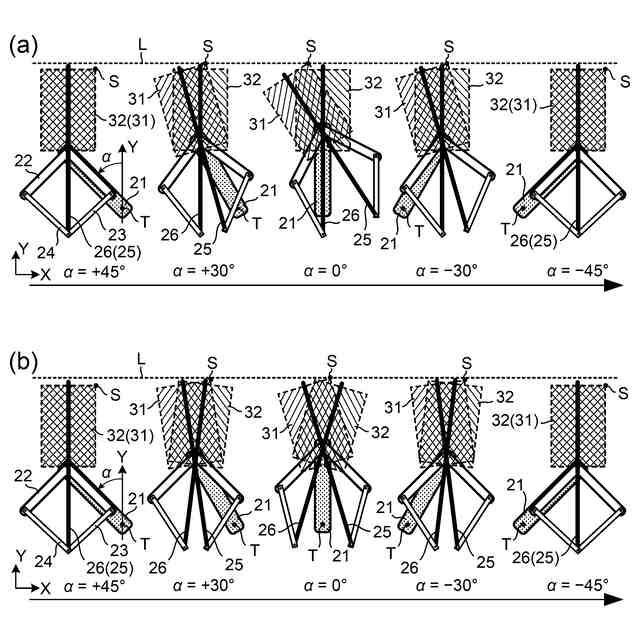
第1の態様のロボット制御方法では、第1ハンド及び第2ハンドが相互に重なり合って第1の方向を向いている起点アクセスポイントから、第1ハンド及び第2ハンドが相互に重なり合って第2の方向を向いている終点アクセスポイントへと、第1の軸の周りでスイングアームを回転させてロボットが移動させるときに、第1ハンドの制御対象点が所定の経路上にありかつ第1ハンドの向きの変化が指定されている連続経路(CP)動作によって第1ハンドを移動させる制御を行い、同時に第2ハンドの制御対象点が前述の所定の経路上にあるようにする制御を行う。
【0008】
このような制御を行うことにより、スイングアームの回転中に第1ハンド及び第2ハンドが所定の経路を通って動くので、ハンドやハンド上のワークなどが周囲の壁面などの物体に衝突することを防ぎつつ、起点アクセスポイントからロボットを全体として迅速に終点アクセスポイントまで移動させることができる。第1の方向と第2の方向とが同方向である場合には、CP動作において第1ハンドの向きを変えないようにすることが好ましい。第1の方向と第2の方向とが異なるときは、CP動作において第1ハンドの向きを一様な速度で第1の方向から第2の方向に変化させてもよいし、一様な速度でスイングアームを回転させるとして、スイングアームの回転角の変化に応じて第1ハンドの向きも変化させてもよい。
【0009】
第2の態様のロボット制御方法では、第1ハンド及び第2ハンドが相互に重なり合って第1の方向を向いている起点アクセスポイントから、第1ハンド及び第2ハンドが相互に重なり合って第2の方向を向いている終点アクセスポイントへと、第1軸の周りでスイングアームを回転させてロボットが移動させるときに、第1ハンドの制御対象点と第2ハンドの制御対象点とが所定の経路上に存在するように1以上の経由点を定め、1以上の経由点を経由させて起点アクセスポイントから終点アクセスポイントまでポイント・ツー・ポイント(PTP)動作でロボットを移動させる。
【0010】
このような制御を行ったときは、衝突が起こらないことが分かっている1以上の点を経由点として使用してPTP動作でロボットを移動させるので、ハンドやワークがロボット周囲の壁面などの衝突することを防ぎつつ、迅速に起点アクセスポイントから終点アクセスポイントまでロボットを移動させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
電動ドライバ
13日前
OMC株式会社
ロボット
1か月前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
16日前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
18日前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
27日前
株式会社スター精機
吸着パッド
12日前
学校法人五島育英会
アーム機構
18日前
株式会社スター精機
吸着パッド
12日前
工機ホールディングス株式会社
作業機
4日前
工機ホールディングス株式会社
作業機
4日前
工機ホールディングス株式会社
作業機
4日前
庄内機械株式会社
釘打装置
1か月前
住友重機械工業株式会社
ロボット
1か月前
株式会社PILLAR
チューブ保持治具
23日前
川崎重工業株式会社
制動システム
1か月前
株式会社アイエイアイ
グリッパー
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社スター精機
産業用ロボット
10日前
オークラ輸送機株式会社
ハンド装置
26日前
株式会社マキタ
電動作業機
19日前
株式会社マキタ
電動作業機
19日前
アイホン株式会社
ネジ締めカウントシステム
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
芝浦機械株式会社
双腕ロボット
1か月前
株式会社リコー
多関節ロボット
17日前
株式会社安川電機
ロボット
10日前
株式会社ダイヘン
ロボット制御システム
16日前
株式会社安川電機
ロボット
10日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
株式会社安川電機
ロボット
10日前
株式会社ジャノメ
ロボット
6日前
パナソニック株式会社
工具
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































