TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025085312
公報種別
公開特許公報(A)
公開日
2025-06-05
出願番号
2023199102
出願日
2023-11-24
発明の名称
ロボットハンド、及びロボット
出願人
三機工業株式会社
代理人
弁理士法人高田・高橋国際特許事務所
主分類
B25J
15/08 20060101AFI20250529BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークをロボットハンドの両面で把持することができ、且つ、ロボットハンドの移動時にワークの位置がずれないようにワークを把持し続けることのできるロボットハンド及びロボットを提供する。
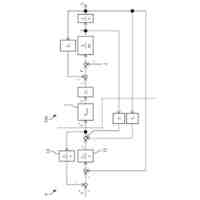
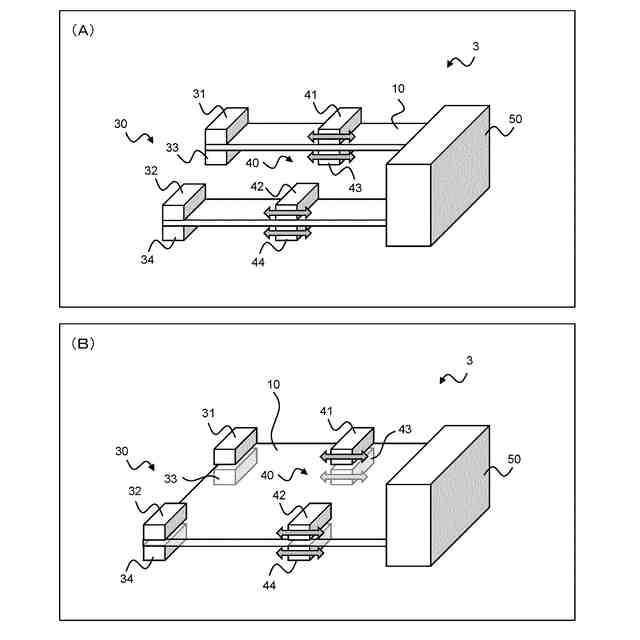
【解決手段】ロボットハンド3は、板状のロボットハンド本体10と、ロボットハンド本体10の上面及び下面のそれぞれの前端に設けられた先端爪30と、ロボットハンド本体10の上面及び下面の先端爪よりも根元側にそれぞれ設けられた根元爪40と、を備えている。また、先端爪30がロボットハンド本体10に固定される。更に、ロボットハンド3は、先端側を前側、根元側を後側とすると、根元爪40を、ワーク2を把持する把持位置とワーク2を開放する開放位置との間でロボットハンド本体10の前後方向に移動させることが可能な可動機構50を更に備えている。
【選択図】図3
特許請求の範囲
【請求項1】
ワークを把持するロボットハンドであって、
板状のロボットハンド本体と、
前記ロボットハンド本体の上面及び下面のそれぞれの先端側に設けられた先端爪と、
前記ロボットハンド本体の上面及び下面の前記先端爪よりも根元側にそれぞれ設けられた根元爪と、
を備え、
前記先端爪が前記ロボットハンド本体に固定され、
前記先端側を前側、前記根元側を後側とし、前記根元爪を、前記ワークを把持する把持位置と前記ワークを開放する開放位置との間で前記ロボットハンド本体の前後方向に移動させることが可能な可動機構を更に備える
ことを特徴とするロボットハンド。
続きを表示(約 960 文字)
【請求項2】
前記先端爪は、前記ロボットハンド本体の幅方向を左右方向とし、前記ロボットハンド本体の上面及び下面に左右方向に間隔を存してそれぞれ配置される左右一対の先端爪部を有し、
前記根元爪は、前記ロボットハンド本体の上面及び下面に左右方向に間隔を存してそれぞれ配置される左右一対の根元爪部を有する
ことを特徴とする請求項1に記載のロボットハンド。
【請求項3】
前記先端爪と前記根元爪の少なくとも一方のワーク把持面には、前記ワークを嵌め込むことが可能な溝が設けられている
ことを特徴とする請求項1に記載のロボットハンド。
【請求項4】
前記先端爪と前記根元爪の少なくとも一方のワーク把持面には、前記ワークとの摩擦係数が前記ワーク把持面よりも高い滑止部材が設けられている
ことを特徴とする請求項1に記載のロボットハンド。
【請求項5】
前記ロボットハンドは、前記ロボットハンド本体を反転させて上面となる面を第1面と前記第1面の反対側の第2面との間で切り替える反転機構を更に備える
ことを特徴とする請求項1に記載のロボットハンド。
【請求項6】
請求項1から請求項5のいずれか一項に記載のロボットハンドと、
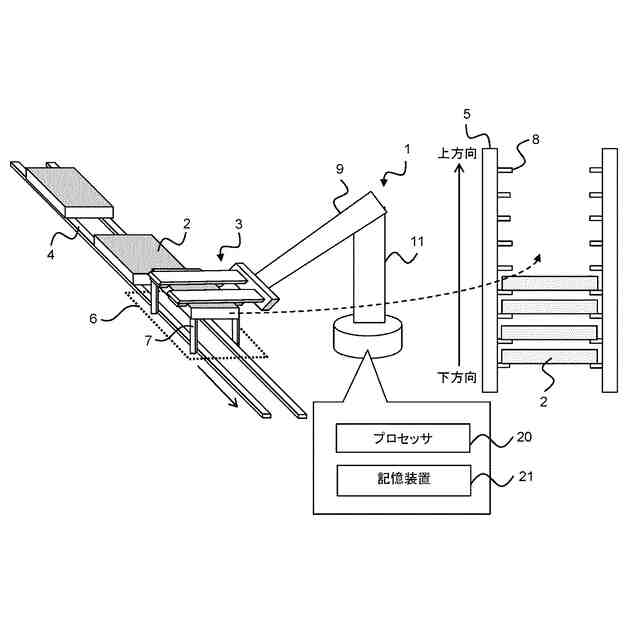
前記ロボットハンドを制御する1又は複数のプロセッサと、を備えるロボットであって、
前記1又は複数のプロセッサは、
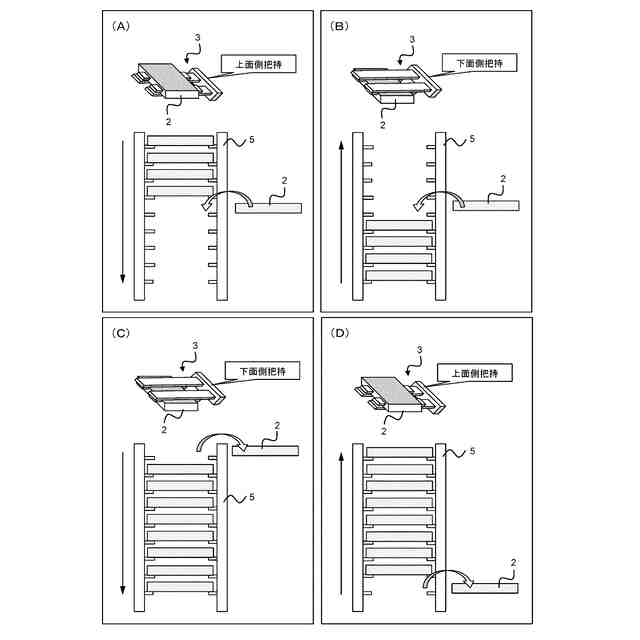
前記ワークを上下方向に複数の棚板が配置された保管棚の上段から下段の順に収納する場合、前記ワークを前記ロボットハンドの上面側で把持するように前記ロボットハンドを制御し、
前記ワークを前記保管棚の下段から上段の順に収納する場合、前記ワークを前記ロボットハンドの下面側で把持するように前記ロボットハンドを制御し、
前記ワークを前記保管棚の上段から下段の順に払い出す場合、前記ワークを前記ロボットハンドの下面側で把持するように前記ロボットハンドを制御し、
前記ワークを前記保管棚の下段から上段の順に払い出す場合、前記ワークを前記ロボットハンドの上面側で把持するように前記ロボットハンドを制御するように構成された
ことを特徴とするロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットハンド及びロボットハンドを有するロボットに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1は、ワークを表裏両面で把持する第1チャックと第2チャックとを備えたロボットハンドを開示している。第1チャックと第2チャックは回転軸を中心にして本体ブロックの表裏両面に対称的に配置されている。ロボットハンドは、第1チャックと第2チャックの各々において3本の爪(チャック爪)を動作させ、ワークを把持する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/049228号
【発明の概要】
【発明が解決しようとする課題】
【0004】
上下方向に間隔をあけて複数の棚板が配置され、上下に隣接する棚板の間の隙間が狭い保管棚に、ワークを収納する場合を考える。ワークを把持するための爪がロボットハンド本体の上面と下面のいずれか一方にのみ設けられている場合、保管棚に収納された日時の古いワークから順に払い出すことができない。例えば、当該爪がロボットハンド本体の下面側にのみ設けられている場合、ワークの収納時では、ワークが保管棚の下段から上段の順に収納され、ワークの払出時では、保管棚の上段から下段の順にワークが払い出される。これにより、収納日時の古いワークが払い出されるまでに一定の期間を要する場合、ワークの品質劣化を招くおそれがある。このため、ロボットハンド本体の上面側と下面側の両面にワークを把持するための爪を設け、ワークの収納時と払出時において、ワークを把持するロボットハンドの面を切り替えられるようにすることが望ましい。
【0005】
更に、ワークのサイズがロボットハンドよりも大きい場合、ロボットハンドはワーク全体を覆うようにワークを把持することができないので、特許文献1に示されるように全て(3本)の爪を径方向に移動させる構成ではワークを安定して把持することができない。仮に爪の数を増やしたとしても、ロボットハンドの基部であるアームが軸回転等の動作を行う際にかかる遠心力によりワークの位置がずれて、ワークがロボットハンドから落下してしまうおそれがある。
【0006】
本開示の1つの目的は、ワークをロボットハンドの両面で把持することができ、且つ、ロボットハンドの移動時にワークの位置がずれないようにワークを安定して把持し続けることのできるロボットハンド及びロボットを提供することにある。更に、本開示のもう一つの目的は、保管棚へのワークの収納順、あるいは保管棚からのワークの払い出し順に応じて、ワークをロボットハンドの上面側または下面側で把持するようにロボットハンドを制御して、保管棚に収納された日時の古いワークから順に払い出すロボットを提供することにある。
【課題を解決するための手段】
【0007】
本開示の第1の観点は、ワークを把持するロボットハンドに関連する。ロボットハンドは、板状のロボットハンド本体と、ロボットハンド本体の上面及び下面のそれぞれの先端側に設けられた先端爪と、ロボットハンド本体の上面及び下面の先端爪よりも根元側にそれぞれ設けられた根元爪と、を備えている。先端爪がロボットハンド本体に固定される。ロボットハンドは、先端側を前側、根元側を後側とすると、根元爪を、ワークを把持する把持位置とワークを開放する開放位置との間でロボットハンド本体の前後方向に移動させることが可能な可動機構を更に備えている。
【0008】
本開示の第2の観点は、第1の観点のロボットハンドと、ロボットハンドを制御する1又は複数のプロセッサと、を備えるロボットに関連する。1又は複数のプロセッサは、ワークを上下方向に複数の棚板が配置された保管棚の上段から下段の順に収納する場合、ワークをロボットハンドの上面側で把持するようにロボットハンドを制御する。あるいは、1又は複数のプロセッサは、保管棚の下段から上段の順に収納する場合、ワークをロボットハンドの下面側で把持するようにロボットハンドを制御する。あるいは、1又は複数のプロセッサは、ワークを保管棚の上段から下段の順に払い出す場合、ワークをロボットハンドの下面側で把持するようにロボットハンドを制御する。あるいは、1又は複数のプロセッサは、ワークを保管棚の下段から上段の順に払い出す場合、ワークをロボットハンドの上面側で把持するようにロボットハンドを制御する。
【発明の効果】
【0009】
本開示の第1の観点によれば、ロボットハンド本体の上面及び下面にそれぞれ先端爪と根元爪とが設けられているため、ワークをロボットハンドの両面で把持することができる。しかも、先端爪を固定し、根元爪のみを開放位置から把持位置に移動させるように構成したため、把持されたワークが根元爪から先端爪に向かう一方向に付勢される。これにより、ロボットハンドの移動時にワークの位置がずれないようにワークを安定して把持し続けることができる。
【0010】
本開示の第2の観点によれば、保管棚へのワークの収納順、あるいは保管棚からのワークの払い出し順に応じて、ワークをロボットハンドの上面側または下面側で把持するようにロボットハンドが制御される。これにより、保管棚に収納された日時の古いワークから順に払い出すことが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三機工業株式会社
長尺物の支持機構
1か月前
国立大学法人群馬大学
磁気浮上装置の制御システム
12日前
株式会社ザイテック
吸着装置
25日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
14日前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
個人
ペグハンマおよびペグハンマ用部品
18日前
株式会社ダイヘン
搬送装置
18日前
住友重機械工業株式会社
教示装置
11日前
川崎重工業株式会社
ロボット
12日前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
11日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
11日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
住友重機械工業株式会社
支援装置
18日前
住友重機械工業株式会社
支援装置
18日前
株式会社PILLAR
チューブ保持治具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
1か月前
株式会社マキタ
電気機器
12日前
ホシデン株式会社
分解用治具
18日前
アピュアン株式会社
衝撃工具
20日前
工機ホールディングス株式会社
作業機
14日前
工機ホールディングス株式会社
作業機
14日前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
14日前
株式会社リコー
多関節ロボット
18日前
工機ホールディングス株式会社
作業機
14日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ