TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084927
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2025032717,2020033589
出願日
2025-03-03,2020-02-28
発明の名称
モジュール制御方法、マイクロサービス制御アプリケーション、エッジコンピュータ
出願人
株式会社東芝
,
東芝デジタルソリューションズ株式会社
代理人
弁理士法人スズエ国際特許事務所
主分類
G06F
9/48 20060101AFI20250527BHJP(計算;計数)
要約
【課題】 本実施形態は、モジュール制御手段を利用してユーザへのサービスを提供するモジュール制御方法、マイクロサービス制御アプリケーション、エッジコンピュータ、サービス提供方法、サービス提供プラットフォーム、および協調作業支援方法を提供する。
【解決手段】 本実施形態では、第1のモジュールに関する第1の制御手段と第2のモジュールに関する第2の制御手段を組み合わせてユーザへのサービスを提供するためのモジュール制御方法、マイクロサービス制御アプリケーション、エッジコンピュータ等、を提供する。
【選択図】 図1
特許請求の範囲
【請求項1】
サーバが通信手段を介して複数のコンピュータに接続可能なモジュール制御方法において、
前記複数のコンピュータは、
それぞれアプリケーションエンジンにより動作可能に設定される複数のアプリケーションルールを、前記サーバから受信して格納しており、
前記複数のアプリケーションルールは、各ルールで特定されている第1のモジュールの動作を検知した場合、各ルールで特定されている第2のモジュールへ前記検知したことを伝達して前記第2のモジュールが動作するように設定したルールとして定義されており、
前記アプリケーションエンジンは、
第1のアプリケーションルールの前記第1のモジュールからの同様の動作データが入力しても、前記第1のアプリケーションルールの動作を指定された時間の間は抑制可能な同一イベント無視時間の設定が可能なことと、
特定の前記第2のモジュールの動作の実行タイミングをずらすことが可能なことと、を備える、モジュール制御方法。
続きを表示(約 270 文字)
【請求項2】
前記コンピュータでは、前記第1のモジュールからの入力を別のコンピュータに通知することを設定可能としている、請求項1に記載のモジュール制御方法。
【請求項3】
請求項1又は請求項2のモジュール制御方法を用いた、
マイクロサービス制御アプリケーション。
【請求項4】
請求項1又は請求項2のモジュール制御方法を用いた、
マイクロサービス制御アプリケーション。
【請求項5】
請求項1又は請求項2のモジュール制御方法を用いた、
エッジコンピュータ。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、モジュールを利用したユーザへのサービスを提供するモジュール制御方法、マイクロサービス制御アプリケーション、エッジコンピュータに関し、サービス提供方法、サービス提供プラットフォーム、および協調作業支援方法にも及ぶものである。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
インターネットを経由して実空間上の物体動作を連携させるIoT(Internet of Thing)技術において、実空間上の物体間の通信プロトコル規格が多く提案されている。その通信プロトコルに関する一例として、下記の技術が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-117587号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本実施形態では、所定の制御手段を利用してユーザへのサービスを提供するモジュール制御方法、マイクロサービス制御アプリケーション、エッジコンピュータ、サービス提供方法、サービス提供プラットフォーム、および協調作業支援方法を提供することを目的とする。
【課題を解決するための手段】
【0005】
本実施形態では、サーバが通信手段を介して複数のコンピュータに接続可能なモジュール制御方法において、
前記複数のコンピュータは、
それぞれアプリケーションエンジンにより動作可能に設定される複数のアプリケーションルールを、前記サーバから受信して格納しており、
前記複数の前記アプリケーションルールは、各ルールで特定されている第1のモジュールの動作を検知した場合、各ルールで特定されている第2のモジュールへ前記検知したことを伝達して前記第2のモジュールが動作するように設定したルールとして定義されており、
前記アプリケーションエンジンは、
第1のアプリケーションルールの前記第1のモジュールからの同様の動作データが入力しても、前記第1のアプリケーションルールの動作を指定された時間の間は抑制可能な同一イベント無視時間の設定が可能なことと、
特定の前記第2のモジュールの動作の実行タイミングをずらすことが可能なことと、を備える、モジュール制御方法が提供される。
【図面の簡単な説明】
【0006】
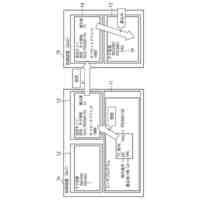
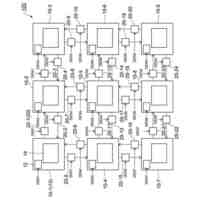
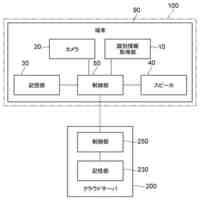
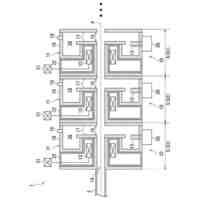
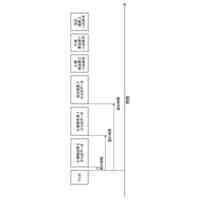
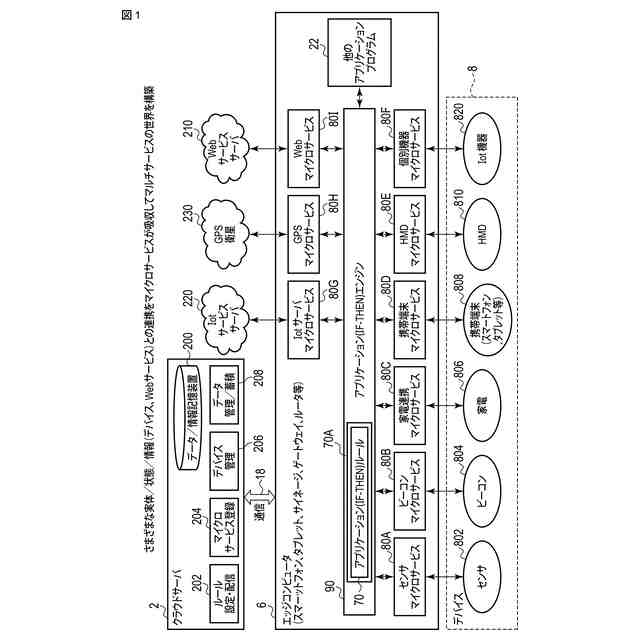
図1は本実施形態の基本概念を示す説明図である。
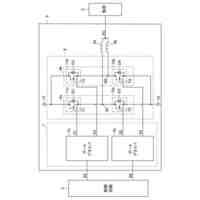
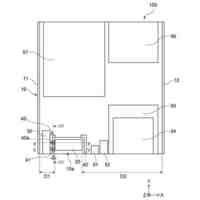
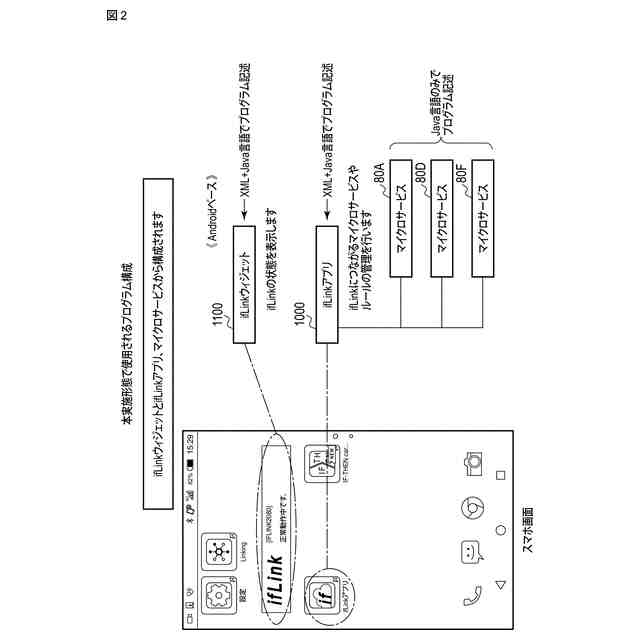
図2はアンドロイドベースのスマートフォンで使用されるプログラム構成を示す説明図である。
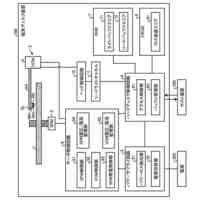
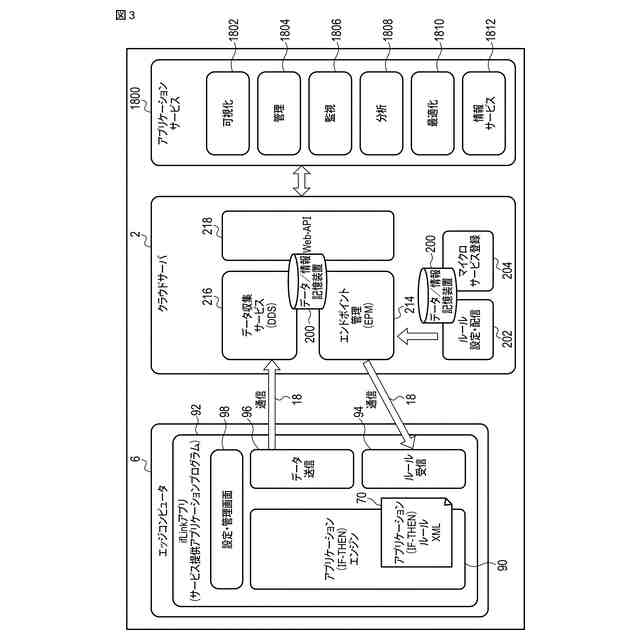
図3はエッジコンピュータ内部とクラウドサーバとの関係を示す説明図である。
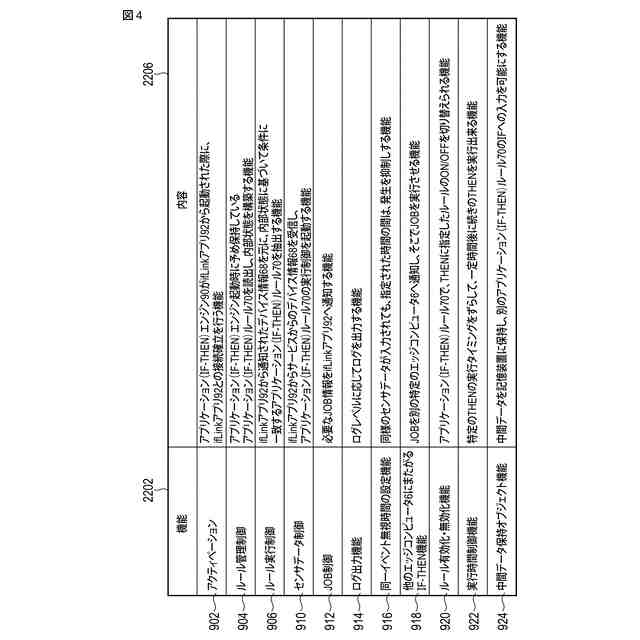
図4はアプリケーション(IF-THEN)エンジンの機能一覧を示す表である。
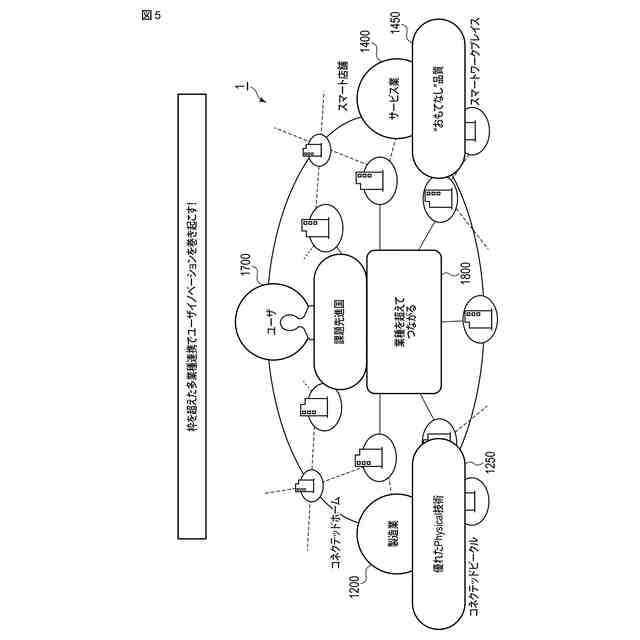
図5は本実施形態内のプレイス(サービス提供プラットフォーム)の基本概念を示す説明図である。
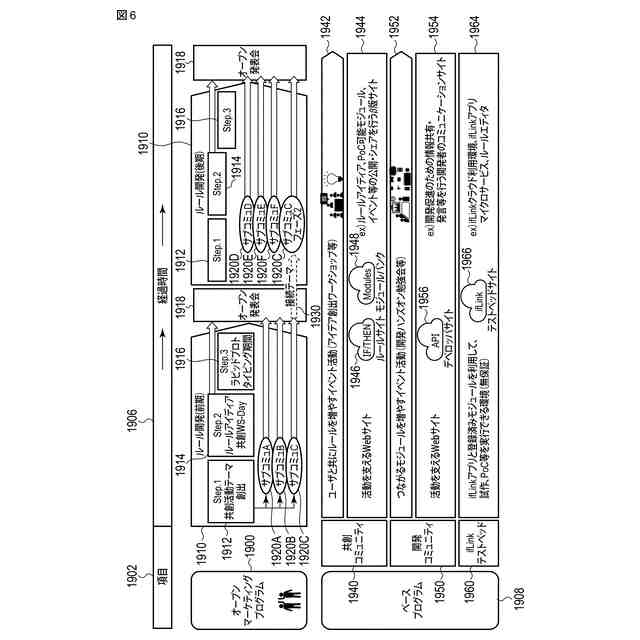
図6はプレイス1内で行う共創活動と共業活動の具体的活動例を示す説明図である。
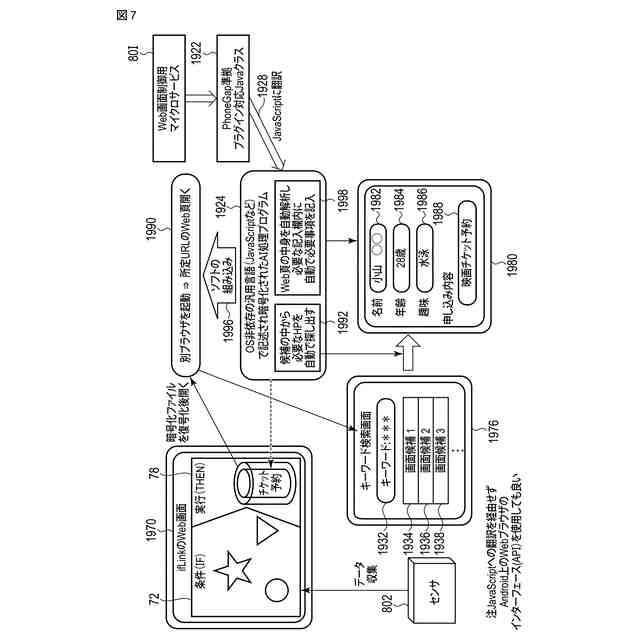
図7は本実施形態で提案するマルチサービス世界におけるサービス提供形態例を示す説明図である。
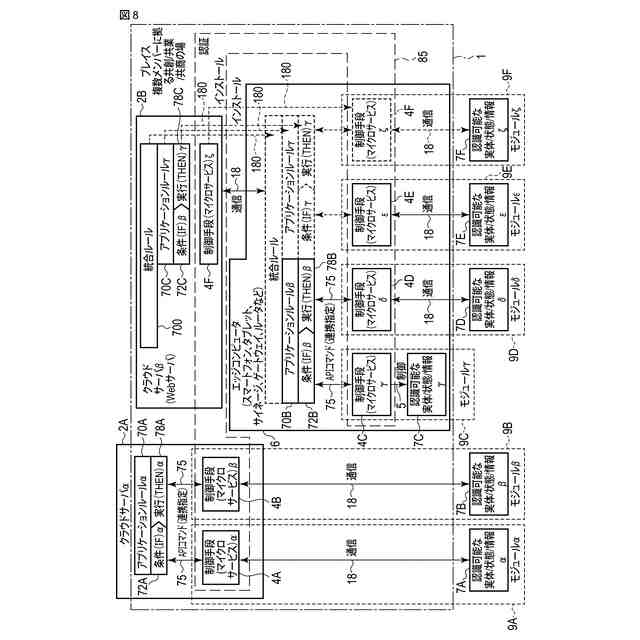
図8は図1に示す基本概念を別の形で表現した説明図である。
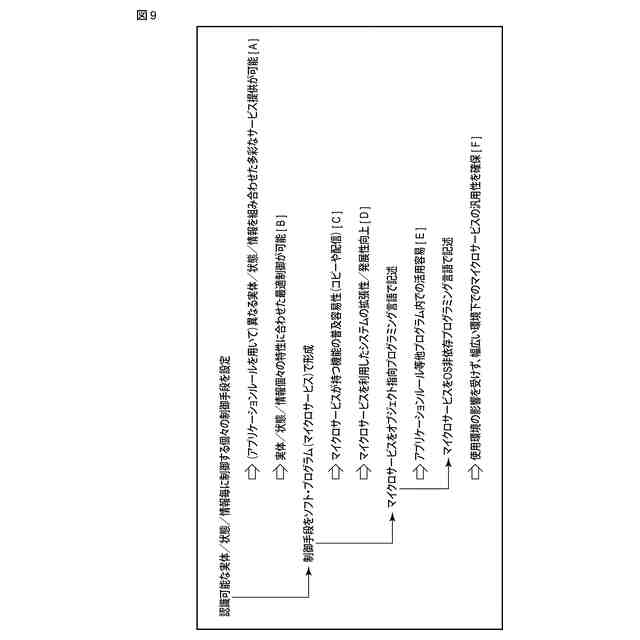
図9は本実施形態の基本概念を採用した場合の効果を説明した説明図である。
図10Aは従来のIoT規格を採用時の課題に関する説明図である。
図10Bはマイクロサービスの概念を使用した場合の効果を示す説明図である。
図11はマイクロサービスをOS非依存のプログラム言語で記述した場合の効果を説明した説明図である。
図12はマイクロサービス内のクラス構成を示す説明図である。
図13は個別デバイス制御用パッケージ内で設定されるマイクロサービスの機能に関する説明図である。
図14はマイクロサービス内制御テンプレートクラス(BaseIms Class)が提供するAPIの一覧を示す説明図である。
図15はデバイス制御テンプレートクラス(BaseDevice Class)が提供するAPIの一覧を示す説明図である。
図16はデバイスの状態遷移図である。
図17はデバイス状態とマイクロサービスの状態との関係を示す説明図である。
図18はプレイス内で行うモジュール認証手順を示す説明図である。
図19はマイクロサービスの暗号化/復号化方法の説明図である。
図20はマイクロサービスファイルとルールファイルの配信方法を示す説明図である。
図21はアプリケーション(IF-THEN)ルールの可視化例を示す説明図である。
図22は多業種間で跨った共創/共業/共商活動を行った場合の長所と短所を示す比較図である。
図23は多様な技術資産の長期的有効利用を可能にする技術の説明図である。
図24はプレイス内の共商活動例を示す説明図である。
図25はプレイス内モジュラ毎の貢献度評価方法例を解説する説明図である。
図26はXMLを用いたアプリケーション(IF-THEN)ルール記載例を示した説明図である。
図27Aは要素毎の記述階層構造に関する説明図である。
図27Bは階層1から階層3に対応した要素の説明図である。
図27Cは階層4から階層5に対応した要素の説明図である。
図27Dは階層6に対応した要素の説明図である。
図28はアプリケーション(IF-THEN)ルールの記載例を示す説明図である。
図29は高品質で感性豊かな音声での表現方法に関する説明図である。
【発明を実施するための形態】
【0007】
第1章 本実施形態の基本概念
図1を用いて本実施形態の概念を説明する。図1に示すシステム構成では、クラウドサーバ2とエッジコンピュータ6とが、互いに通信可能18な構成となっている。またこのエッジコンピュータ6は、センサ802やビーコン804、家電806、スマートフォンやタブレットなどの携帯端末808、HMD(head mounted display)810、IoT機器820などの各種デバイス8を制御して、ユーザに各種サービスを提供できる。これら各種デバイスが例えば温度センサ、圧力センサ、ジャイロなどの場合は、このエッジコンピュータ6内に内蔵されてもよい。それに限らず、これら各種デバイスの一部はこのエッジコンピュータ6の外に配置され、通信で制御されてもよい。
【0008】
このエッジコンピュータ6の内部はアプリケーション(IF-THEN)エンジン90を持ち、予め記録された(クラウドサーバ2から事前にインストールされた)アプリケーション(IF-THEN)ルール70に応じた処理を行って(各種デバイス8を制御して)、ユーザにサービスを提供する。
【0009】
また図1に示すように、センサ802やビーコン804、家電806、スマートフォンやタブレットなどの携帯端末808、HMD(head mounted display)810、IoT機器820などの各種デバイス8を個々に制御するマイクロサービス80A~80Fが、エッジコンピュータ6内に予め組み込まれて(クラウドサーバ2から事前にインストールされて)いる。そしてこれらのマイクロサービス80A~80Fをアプリケーション(IF-THEN)エンジン90が操作して、各種デバイス8間の連携制御を行う。この時には、アプリケーション(IF-THEN)エンジン90から操作したいマイクロサービス80A~80Fに対してAPI(application program interface)コマンドが発行される。
【0010】
またそれに限らず本実施形態では、IoTサービスサーバ220と連携制御するIoTサーバマイクロサービス80GやGPS衛星230から得られたGPS位置情報を取得するGPSマイクロサービス80H、Webサービスサーバ210に対してアクセスしてWebサービスを得るためのWebマイクロサービス80Iなどを所有(エッジコンピュータ6内に予めインストール)してもよい。またGPSは、計測精度の高いRTK-GNSSも含んでもよいことは勿論である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
16日前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
回転電機
1か月前
株式会社東芝
発振回路
2か月前
株式会社東芝
制御装置
2日前
株式会社東芝
立て看板
今日
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
13日前
株式会社東芝
半導体装置
6日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
1か月前
株式会社東芝
半導体装置
2か月前
株式会社東芝
半導体装置
8日前
株式会社東芝
真空バルブ
20日前
株式会社東芝
半導体装置
今日
株式会社東芝
半導体装置
2か月前
株式会社東芝
情報表示装置
1か月前
株式会社東芝
静止誘導電器
22日前
株式会社東芝
車両システム
20日前
株式会社東芝
静止誘導電器
24日前
株式会社東芝
電力変換装置
1か月前
株式会社東芝
配線支援装置
1か月前
株式会社東芝
区分システム
7日前
株式会社東芝
スイッチギヤ
21日前
株式会社東芝
粒子線治療装置
23日前
株式会社東芝
加速器システム
2か月前
株式会社東芝
電池モジュール
1か月前
株式会社東芝
電子計算機装置
1か月前
株式会社東芝
光注入同期装置
1か月前
株式会社東芝
X線厚み測定装置
16日前
株式会社東芝
磁気ディスク装置
1か月前
株式会社東芝
回転電機の回転子
1か月前
株式会社東芝
磁気ディスク装置
2か月前
株式会社東芝
磁気ディスク装置
8日前
株式会社東芝
空転・滑走学習装置
21日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ