TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025084341
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198179
出願日
2023-11-22
発明の名称
産業用ロボット及び吸着装置
出願人
株式会社デンソーウェーブ
代理人
個人
主分類
B25J
15/06 20060101AFI20250527BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】吸着機能を安定して発揮させつつ吸着対象となる包装材の保護を図ること。
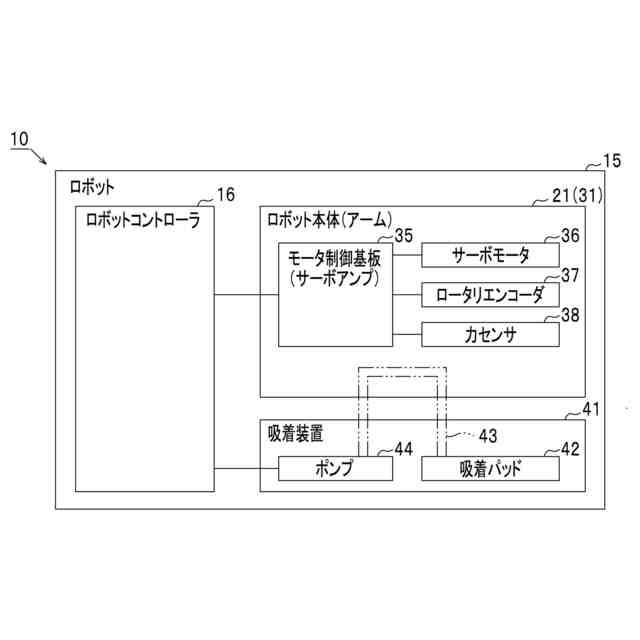
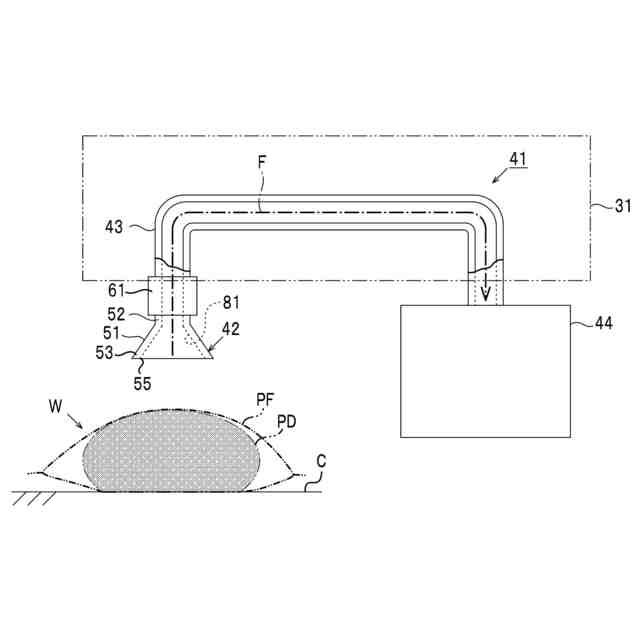
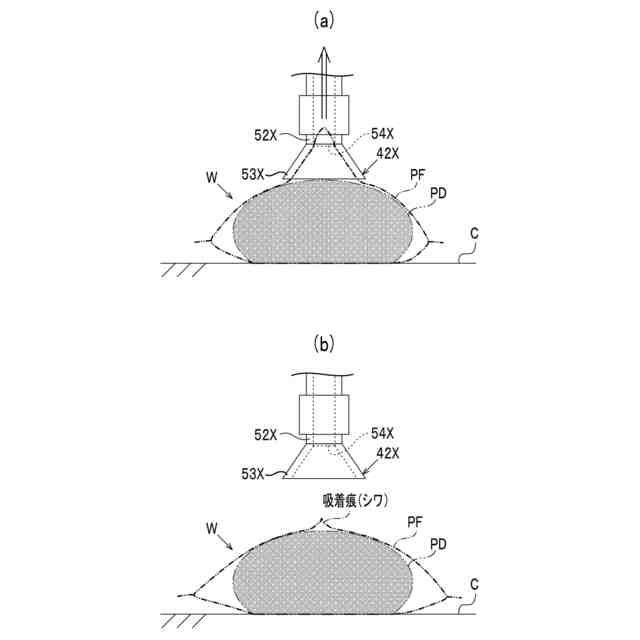
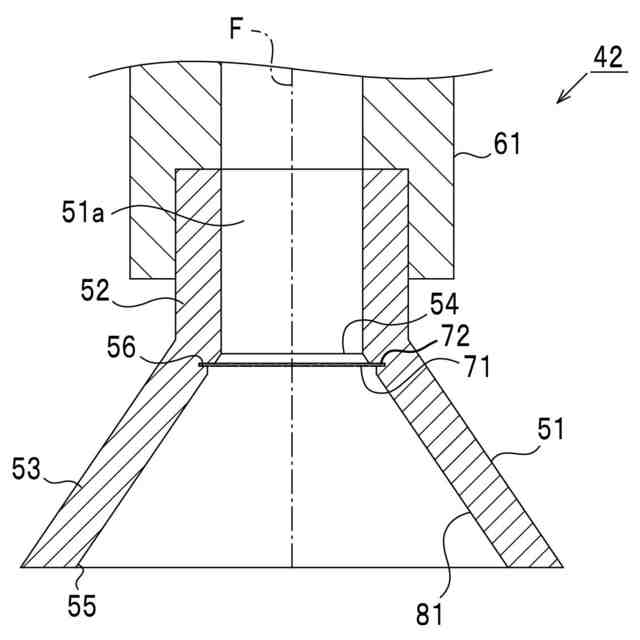
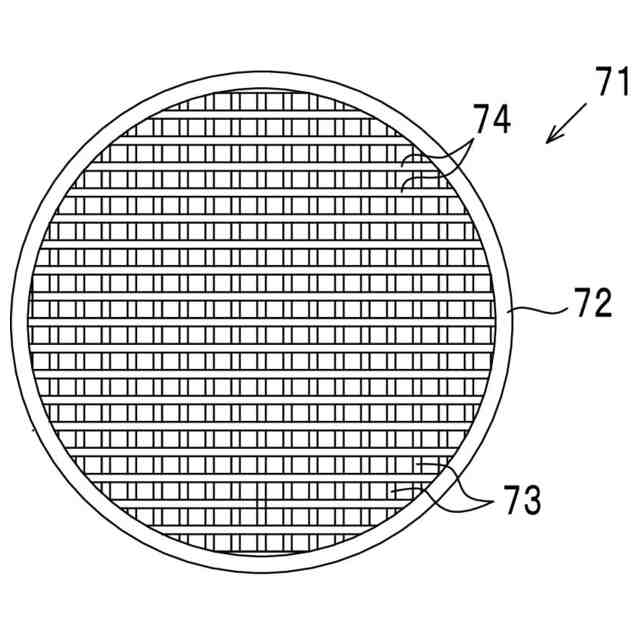
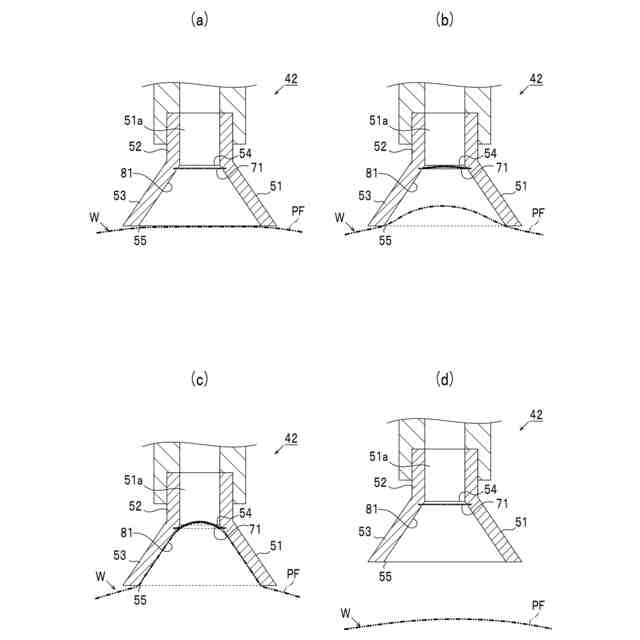
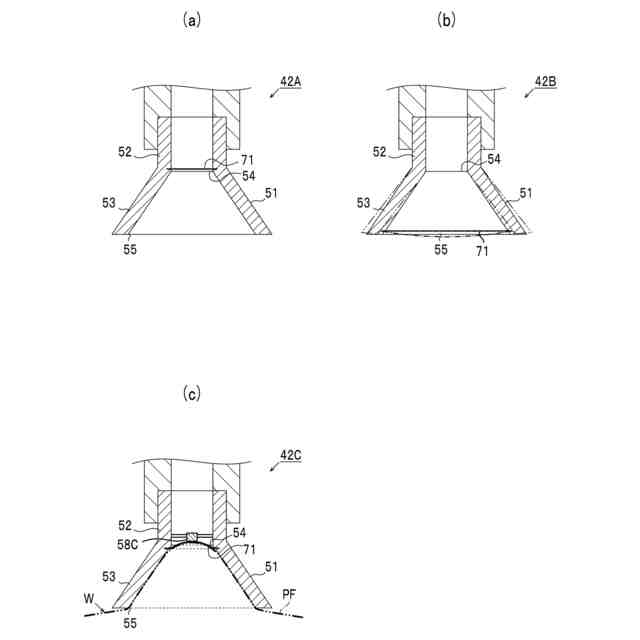
【解決手段】産業用ロボットには、アームの手先に装着された吸着パッド42と、当該吸着パッド42及び吸引用のポンプを繋ぐ配管部とが搭載されている。吸着パッド42は、包装材PF及び当該包装材PFに収容されている収容物PDとからなるワークWの保持に際して包装材PFに当接するヘッド51を有している。ヘッド51の内部には当該ヘッド51に形成されている吸気孔51aと交差する面状をなす網状部材71が配設されている。網状部材71は弾性変形可能となっており、包装材PFの吸着時には、包装材PFに押された網状部材71が当該包装材PFとともにポンプによる吸引方向へ撓み変形する。
【選択図】 図4
特許請求の範囲
【請求項1】
産業用ロボットに適用され、包装材を用いて物品を包装してなるワークを吸着する吸着装置であって、
前記ワークの前記包装材に当接する吸着ヘッドと、
吸引用のポンプと、
前記吸着ヘッドと前記ポンプとを繋ぐ配管部と
を備え、
前記吸着ヘッドには、当該吸着ヘッドに形成されている流路と交差する面状をなし且つ前記ポンプによる吸引方向へ撓み変形可能な網状部材が設けられている吸着装置。
続きを表示(約 690 文字)
【請求項2】
前記網状部材は、吸引された前記包装材により吸引方向へ押されることにより当該包装材とともに前記吸引方向へ凸となるようにして撓み変形するように構成されている請求項1に記載の吸着装置。
【請求項3】
前記吸着ヘッドは、円筒状のベース部と、前記ベース部の一端側に設けられ内径が先端に向けて徐々に大きくなるように形成された拡径部とを有してなり、
前記ベース部と前記拡径部との境界は、前記網状部材によって前記吸着ヘッドの先端側から覆われている請求項1又は請求項2に記載の吸着装置。
【請求項4】
前記拡径部は、前記ワークに当たった際に弾性変形可能となるように形成されており、
前記網状部材は、前記拡径部にて前記境界寄りとなる部分に固定されている請求項3に記載の吸着装置。
【請求項5】
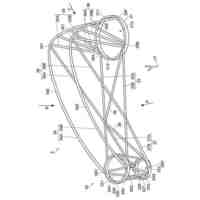
複数の関節部が形成されたアームを備えている産業用ロボットであって、
前記アームの手先に取り付けられ、包装材を用いて物品を包装してなるワークを保持する際に前記包装材に当接する吸着ヘッドと、
前記アームに取り付けられ、前記吸着ヘッドと吸引用のポンプとを繋ぐ配管部と
を有する吸着装置を備え、
前記吸着ヘッドには、当該吸着ヘッドに形成されている流路と交差する面状をなし、撓み変形可能な網状部材が設けられており、
前記網状部材は、吸引された前記包装材によって吸引方向へ押されることにより当該包装材とともに前記吸引方向へ凸となるようにして撓み変形する構成となっている産業用ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボット及び産業用ロボットに適用される吸着装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
多関節型のアームを有する産業用ロボットには、当該アームの手先にワークを保持するハンドを装着可能となっているものがある。この種のハンドには、複数の指部によってワークを挟持するように構成されたものや、配管を介してポンプに接続された吸着パッド(吸着ヘッド)によってワークを吸着するように構成されたものがある(例えば、特許文献1参照)。例えば特許文献2には、食品が袋体(包装材)に収容されているワークを吸着パッドにより吸着して移送するロボットが提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2004-291132号公報
特開2019-922号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
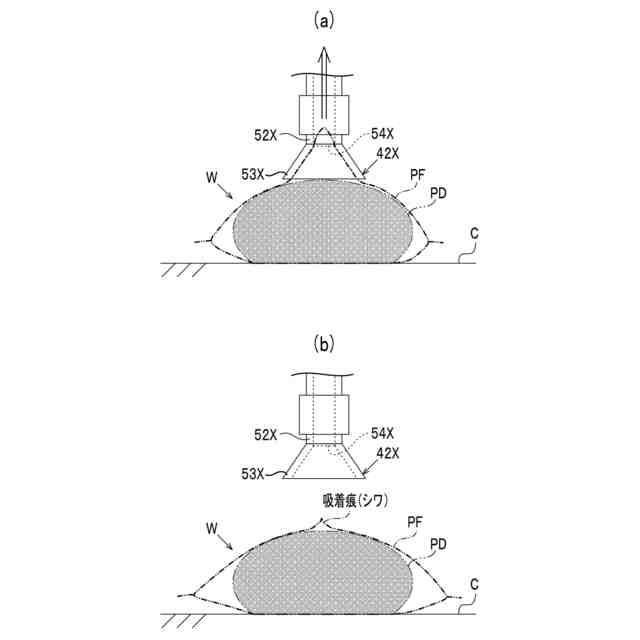
上述した吸着タイプのハンドについては、ポンプを用いて吸着パッドから空気を吸引することによりワークを吸着する吸着力を発生させる構成となっているものが多い。ワークを吸着して保持するためには相応の吸着力が必要になり、吸着力をある程度大きく設定することで吸着機能を安定して発揮させることができる。ここで、物品がポリエチレンや塩化ビニル、セロハン、紙等の比較的厚みが薄い包装材で包装されてなるワークの場合には、ワークを安定して吸着可能となる大きさの吸着力を発生させることで、包装材にシワが発生し得る。そして、包装材にシワが残ってしまった場合には、包装されている物品そのものに品質上の問題がなかったとしても破棄の対象となる可能性が生じ、製品(ワーク)の歩留まりが低下すると想定される。特に、食品分野においては、そのような事象が発生することが食品ロスの要因になり得る。このように包装材を吸着してワークを保持する構成においては、吸着機能を安定して発揮させつつ吸着対象となる包装材の保護を図る上でその構成に未だ改善の余地がある。
【0005】
本発明は、上記例示した課題等に鑑みてなされたものであり、その主たる目的は、吸着機能を安定して発揮させつつ吸着対象となる包装材の保護を図ることにある。
【課題を解決するための手段】
【0006】
以下、上記課題を解決するための手段について記載する。
【0007】
第1の手段.産業用ロボットに適用され、包装材を用いて物品を包装してなるワークを吸着する吸着装置であって、
前記ワークの前記包装材に当接する吸着ヘッドと、
吸引用のポンプと、
前記吸着ヘッドと前記ポンプとを繋ぐ配管部と
を備え、
前記吸着ヘッドには、当該吸着ヘッドに形成されている流路と交差する面状をなし且つ前記ポンプによる吸引方向へ撓み変形可能な網状部材が設けられている。
【0008】
ワークの吸着に際して包装材を吸着対象とする場合には、吸着力をある程度大きくすることが吸着機能を安定して発揮させる上で好ましい。しかしながら、吸着力が大きくなれば、包装材に生じる負荷も大きくなり、包装材が弾性域を超えて変形することで当該包装材にシワが発生し得る。これは、ワーク(製品)の歩留まりを低下させる要因となる。この点、本手段に示す構成では、吸着に際して流路へ引き込まれた包装材は、引き込みの過程で網状部材に当たる。包装材によって押された網状部材は包装材とともに流路の奥側へ撓み変形し、包装材が瞬時に大きく変形することが回避される。このようにして包装材の急激な変形を回避することは、当該包装材の保護を図る上で好ましい。また、流路の奥側へ撓み変形する網状部材を用いることで、包装材の一部に大きな負荷が加わることを抑制できる。これにより包装材の保護機能を強化できる。以上の理由から、本手段に示す構成によれば、吸着機能の安定化を図るべく吸着力をある程度大きくしたとしても、それが包装材のシワの要因になることを抑制でき、吸着機能の安定化と包装材の保護とを好適に両立できる。
【0009】
第2の手段.複数の関節部が形成されたアームを備えている産業用ロボットであって、
前記アームの手先に取り付けられ、包装材を用いて物品を包装してなるワークを保持する際に前記包装材に当接する吸着ヘッドと、
前記アームに取り付けられ、前記吸着ヘッドと吸引用のポンプとを繋ぐ配管部と
を有する吸着装置を備え、
前記吸着ヘッドには、当該吸着ヘッドに形成されている流路と交差する面状をなし、撓み変形可能な網状部材が設けられており、
前記網状部材は、吸引された前記包装材によって吸引方向へ押されることにより当該包装材とともに前記吸引方向へ凸となるようにして撓み変形する構成となっている。
【0010】
本手段に示す構成によれば、吸着機能の安定化を図るべく吸着力をある程度大きくしたとしても、それが包装材のシワの要因になることを抑制でき、吸着機能の安定化と包装材の保護とを好適に両立できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
2日前
日東精工株式会社
電動ドライバ
26日前
株式会社ダイヘン
移動体
29日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社不二越
ロボット
1か月前
東京都公立大学法人
対象物把持装置
1か月前
株式会社スター精機
吸着パッド
25日前
株式会社スター精機
吸着パッド
25日前
工機ホールディングス株式会社
作業機
17日前
工機ホールディングス株式会社
作業機
17日前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
17日前
株式会社PILLAR
チューブ保持治具
1か月前
株式会社アイエイアイ
グリッパー
1か月前
住友重機械工業株式会社
ロボット
1か月前
川崎重工業株式会社
制動システム
1か月前
株式会社イノウ
給油口キャップ用開閉具
1か月前
庄内機械株式会社
釘打装置
1か月前
オークラ輸送機株式会社
ハンド装置
10日前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社スター精機
産業用ロボット
23日前
オークラ輸送機株式会社
ハンド装置
1か月前
アイホン株式会社
ネジ締めカウントシステム
1か月前
川崎重工業株式会社
ロボットシステム
11日前
株式会社マキタ
電動作業機
1か月前
芝浦機械株式会社
双腕ロボット
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
トヨタ自動車東日本株式会社
搬送治具
1か月前
株式会社ジャノメ
ロボット
19日前
株式会社安川電機
ロボット
23日前
株式会社安川電機
ロボット
23日前
株式会社安川電機
ロボット
23日前
株式会社ダイヘン
ロボット制御システム
29日前
トヨタ自動車株式会社
荷姿影響緩和方法
1か月前
セイコーエプソン株式会社
ロボット
25日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ