TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079241
公報種別
公開特許公報(A)
公開日
2025-05-21
出願番号
2023191816
出願日
2023-11-09
発明の名称
支援システム、支援方法、支援プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
G08G
1/09 20060101AFI20250514BHJP(信号)
要約
【課題】適正な走行調停が可能な支援システム等を、提供する。
【解決手段】支援システムは、プロセッサを有し、ホスト車両及び自動運転可能なターゲット車両の走行を遠隔支援する。プロセッサは、ターゲット画像関連データを取得することを実行するように構成される。ターゲット画像関連データは、ホスト車両に搭乗するユーザの意思に応答して、ホスト車両の走行を障害する走行障害状態にあるターゲット車両がセンシングされることにより、ホスト車両側から出力される、ターゲット車両の画像に関するデータである。プロセッサは、ターゲット画像関連データにマッチングするターゲット車両に対して走行障害状態を解消させる解消走行と、ホスト車両に対して走行障害状態の継続に対応させる対応行動と、を調停した調停データを出力することを実行するように構成される。調停データは、ホスト車両側及びターゲット車両側へ出力される。
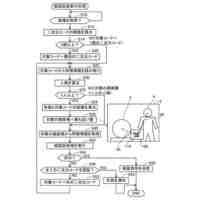
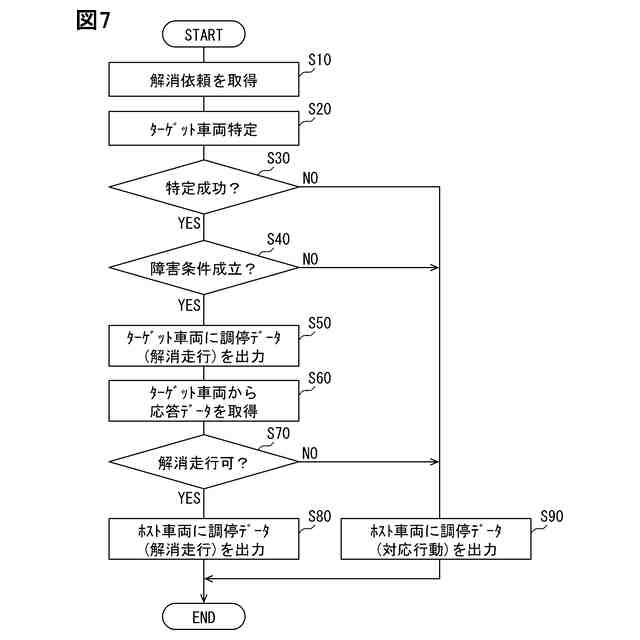
【選択図】図7
特許請求の範囲
【請求項1】
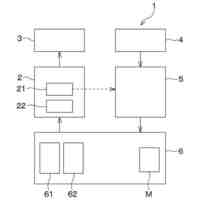
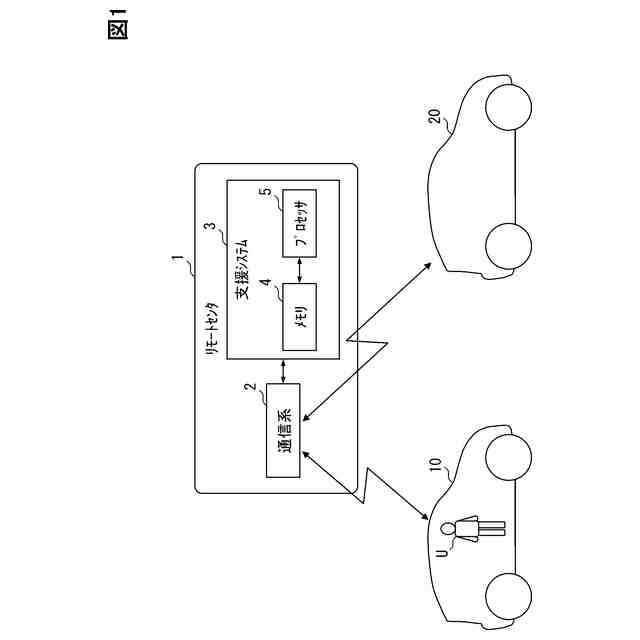
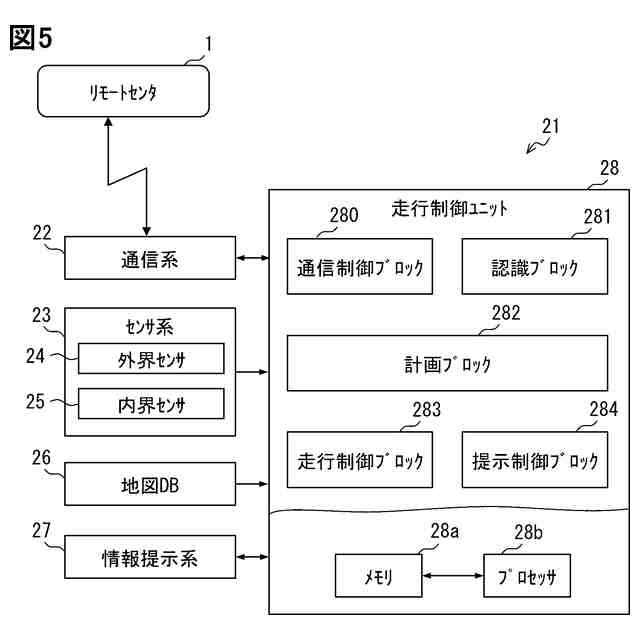
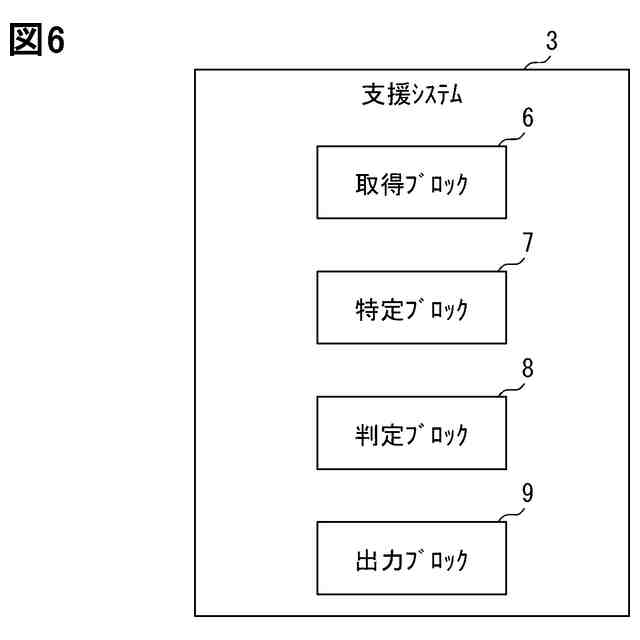
プロセッサ(5)を有し、ホスト車両(10)及び自動運転可能なターゲット車両(20)の走行を遠隔支援する支援システムであって、
前記プロセッサは、
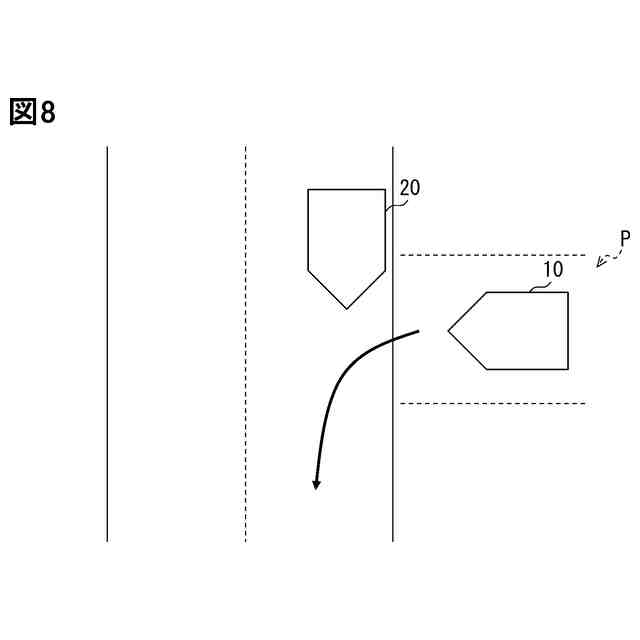
前記ホスト車両に搭乗するユーザ(U)の意思に応答して、前記ホスト車両の走行を障害する走行障害状態にある前記ターゲット車両がセンシングされることにより、前記ホスト車両側から出力される、前記ターゲット車両の画像に関するターゲット画像関連データを取得することと、
前記ターゲット画像関連データにマッチングする前記ターゲット車両に対して前記走行障害状態を解消させる解消走行と、前記ホスト車両に対して前記走行障害状態の継続に対応させる対応行動と、を調停した調停データを前記ホスト車両側及び前記ターゲット車両側へ出力することと、
を実行するように構成される支援システム。
続きを表示(約 1,900 文字)
【請求項2】
前記ターゲット画像関連データは、前記ホスト車両に設けられたカメラにより前記ターゲット車両が撮像された画像を、含む請求項1に記載の支援システム。
【請求項3】
前記ターゲット画像関連データは、前記ホスト車両に搭乗する前記ユーザが持ち込むカメラにより前記ターゲット車両が撮像された画像を、含む請求項1に記載の支援システム。
【請求項4】
前記ターゲット画像関連データを取得することは、
前記ターゲット車両のセンシングが許容されるセンシング条件が成立した前記ホスト車両での、前記意思に応答したセンシングによる前記ターゲット画像関連データを、取得することを含む請求項1に記載の支援システム。
【請求項5】
前記調停データを出力することは、
前記ターゲット画像関連データにマッチングする前記ターゲット車両が前記走行障害状態であることを認可する、前記ホスト車両及び前記ターゲット車両の少なくとも一方に関するセンシングに応じた障害条件が不成立である場合に、前記調停データの前記ターゲット車両側への出力を中止することを含む請求項1に記載の支援システム。
【請求項6】
前記プロセッサは、
前記ターゲット画像関連データの取得に応答して、前記ターゲット画像関連データにマッチングすると予測される前記ターゲット車両に前記ホスト車両をセンシングさせたセンシング結果を取得することをさらに実行するように構成され、
前記調停データを出力することは、
前記ホスト車両の存在を検出する前記センシング結果を取得する前記障害条件の成立により、前記ターゲット車両側へ前記調停データを出力することを含む請求項5に記載の支援システム。
【請求項7】
前記ターゲット画像関連データを取得することは、
前記ターゲット画像関連データと共に、前記ターゲット車両の位置データを取得することを含み、
前記調停データを出力することは、
前記ターゲット画像関連データ及び前記位置データにマッチングする前記ターゲット車両の前記解消走行と、前記ホスト車両の前記対応行動と、を調停した前記調停データを出力することを含む請求項1に記載の支援システム。
【請求項8】
前記調停データを出力することは、
前記ターゲット画像関連データにマッチングする前記ターゲット車両に関して、前記解消走行を指示できる指示条件が不成立となる場合、前記対応行動を前記ホスト車両に強制する前記調停データを前記ホスト車両側へ出力することを含む請求項1に記載の支援システム。
【請求項9】
ホスト車両(10)及び自動運転可能なターゲット車両(20)の走行を遠隔支援するために、プロセッサ(5)により実行される支援方法であって、
前記ホスト車両に搭乗するユーザ(U)の意思に応答して、前記ホスト車両の走行を障害する走行障害状態にある前記ターゲット車両がセンシングされることにより、前記ホスト車両側から出力される、前記ターゲット車両の画像に関するターゲット画像関連データを取得することと、
前記ターゲット画像関連データにマッチングする前記ターゲット車両に対して前記走行障害状態を解消させる解消走行と、前記ホスト車両に対して前記走行障害状態の継続に対応させる対応行動と、を調停した調停データを前記ホスト車両側及び前記ターゲット車両側へ出力することと、
を含む支援方法。
【請求項10】
ホスト車両(10)及び自動運転可能なターゲット車両(20)の走行を遠隔支援するために記憶媒体(4)に記憶され、プロセッサ(5)に実行させる命令を含む支援プログラムであって、
前記命令は、
前記ホスト車両に搭乗するユーザ(U)の意思に応答して、前記ホスト車両の走行を障害する走行障害状態にある前記ターゲット車両がセンシングされることにより、前記ホスト車両側から出力される、前記ターゲット車両の画像に関するターゲット画像関連データを取得させることと、
前記ターゲット画像関連データにマッチングする前記ターゲット車両に対して前記走行障害状態を解消させる解消走行と、前記ホスト車両に対して前記走行障害状態の継続に対応させる対応行動と、を調停した調停データを前記ホスト車両側及び前記ターゲット車両側へ出力させることと、
を含む支援プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ホスト車両及び自動運転可能なターゲット車両の走行を遠隔支援する支援技術に、関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、有人走行車と無人走行車が混在して走行する環境において無人走行車の動作を制御する車両走行管理システムが開示されている。この車両走行管理システムは、有人走行車と無人走行車との車両間距離が無条件停止距離よりも短い場合には、無人走行車の走行を停止させる。
【先行技術文献】
【特許文献】
【0003】
特開2023-19126号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動運転車両が他の車両の走行を障害する状態となると、走行を障害された車両のユーザは不便を被り得る。しかし、例えば特許文献1の技術を応用して、車両間距離を把握して自動運転車両を制御し、他の車両の走行障害となることを常時予め回避することは、困難が伴う。したがって、自動運転車両が他の車両の走行を障害する状態となった場合であっても、各車両について適正に走行調停を実行する必要が生じ得る。
【0005】
本開示の課題は、適正な走行調停が可能な支援システムを、提供することにある。本開示の別の課題は、適正な走行調停が可能な支援方法を、提供することにある。本開示のさらに別の課題は、適正な走行調停が可能な支援プログラムを、提供することにある。
【課題を解決するための手段】
【0006】
以下、課題を解決するための本開示の技術的手段について、説明する。尚、特許請求の範囲及び本欄に記載された括弧内の符号は、後に詳述する実施形態に記載された具体的手段との対応関係を示すものであり、本開示の技術的範囲を限定するものではない。
【0007】
本開示の第一態様は、プロセッサ(5)を有し、ホスト車両(10)及び自動運転可能なターゲット車両(20)の走行を遠隔支援する支援システムであって、
プロセッサは、
ホスト車両に搭乗するユーザ(U)の意思に応答して、ホスト車両の走行を障害する走行障害状態にあるターゲット車両がセンシングされることにより、ホスト車両側から出力される、ターゲット車両の画像に関するターゲット画像関連データを取得することと、
ターゲット画像関連データにマッチングするターゲット車両に対して走行障害状態を解消させる解消走行と、ホスト車両に対して走行障害状態の継続に対応させる対応行動と、を調停した調停データをホスト車両側及びターゲット車両側へ出力することと、
を実行するように構成される。
【0008】
本開示の第二態様は、ホスト車両(10)及び自動運転可能なターゲット車両(20)の走行を遠隔支援するために、プロセッサ(5)により実行される支援方法であって、
ホスト車両に搭乗するユーザ(U)の意思に応答して、ホスト車両の走行を障害する走行障害状態にあるターゲット車両がセンシングされることにより、ホスト車両側から出力される、ターゲット車両の画像に関するターゲット画像関連データを取得することと、
ターゲット画像関連データにマッチングするターゲット車両に対して走行障害状態を解消させる解消走行と、ホスト車両に対して走行障害状態の継続に対応させる対応行動と、を調停した調停データをホスト車両側及びターゲット車両側へ出力することと、
を含む。
【0009】
本開示の第三態様は、ホスト車両(10)及び自動運転可能なターゲット車両(20)の走行を遠隔支援するために記憶媒体(4)に記憶され、プロセッサ(5)に実行させる命令を含む支援プログラムであって、
命令は、
ホスト車両に搭乗するユーザ(U)の意思に応答して、ホスト車両の走行を障害する走行障害状態にあるターゲット車両がセンシングされることにより、ホスト車両側から出力される、ターゲット車両の画像に関するターゲット画像関連データを取得させることと、
ターゲット画像関連データにマッチングするターゲット車両に対して走行障害状態を解消させる解消走行と、ホスト車両に対して走行障害状態の継続に対応させる対応行動と、を調停した調停データをホスト車両側及びターゲット車両側へ出力させることと、
を含む。
【0010】
これら第一~第三態様によると、ターゲット画像関連データにマッチングするターゲット車両に対して走行障害状態を解消させる解消走行と、ホスト車両に対して走行障害状態の継続に対応させる対応行動と、を調停した調停データが、ホスト車両側及びターゲット車両側へ出力される。故に、自動運転可能なターゲット車両がホスト車両の走行障害状態となった場合であっても、ターゲット車両が解消走行を行うのか、若しくはホスト車両が対応行動を行うのかが、調停され得る。したがって、ホスト車両及びターゲット車両の双方に対して、適正な走行調停が可能となり得る。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
携帯機
1日前
株式会社デンソー
電気機器
10日前
株式会社デンソー
中継装置
4日前
株式会社デンソー
駆動装置
22日前
株式会社デンソーテン
表示装置
3日前
株式会社デンソー
熱交換器
10日前
株式会社デンソーウェーブ
携帯端末
1日前
株式会社デンソー
熱交換器
3日前
株式会社デンソー
ステータ
3日前
株式会社デンソー
位相調整器
7日前
株式会社デンソー
センサ装置
9日前
株式会社デンソーウェーブ
顔認証装置
8日前
株式会社デンソー
半導体装置
21日前
株式会社デンソー
レーダ装置
10日前
株式会社デンソー
半導体装置
4日前
株式会社デンソー
電力変換装置
2日前
株式会社デンソー
電池監視装置
10日前
株式会社デンソー
電力変換装置
2日前
株式会社デンソーテン
スピーカ装置
15日前
株式会社デンソー
電子制御装置
9日前
株式会社デンソー
電子制御装置
15日前
株式会社デンソー
電子制御装置
8日前
株式会社デンソー
電力変換装置
22日前
株式会社デンソー
電気音響変換器
10日前
株式会社デンソーウェーブ
三次元計測装置
8日前
株式会社デンソー
車載用冷凍装置
23日前
株式会社デンソーウェーブ
三次元計測装置
3日前
株式会社デンソー
ガス燃料噴射弁
1日前
株式会社デンソー
半導体パッケージ
4日前
株式会社デンソー
スイッチング素子
21日前
株式会社デンソー
プログラム確認装置
4日前
株式会社デンソー
データ保存システム
9日前
株式会社デンソーウェーブ
光学的情報読取装置
1日前
株式会社デンソーテン
制御装置及び制御方法
21日前
株式会社デンソー
ステータアッセンブリ
3日前
株式会社デンソー
検出装置及びプログラム
21日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ