TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025079219
公報種別
公開特許公報(A)
公開日
2025-05-21
出願番号
2023191771
出願日
2023-11-09
発明の名称
無人搬送車の制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
G05D
1/243 20240101AFI20250514BHJP(制御;調整)
要約
【課題】坂路における無人搬送車の走行安定性を良好に確保する。
【解決手段】本開示の無人搬送車の制御装置は、車体に搭載された駆動源により駆動される駆動輪と、車体により旋回自在に支持されたキャスタとを含む無人搬送車を制御するものであり、無人搬送車の前方に所定勾配以上の坂路が存在するか否かを判定し、無人搬送車の前方に坂路が存在すると判定したときに、当該坂路で駆動輪が上側に位置すると共にキャスタが下側に位置するように無人搬送車の向きを設定する。
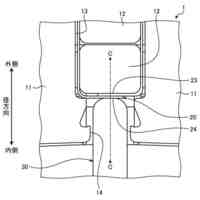
【選択図】図2
特許請求の範囲
【請求項1】
車体に搭載された駆動源により駆動される駆動輪と、前記車体により旋回自在に支持されたキャスタとを含む無人搬送車の制御装置であって、
前記無人搬送車の前方に所定勾配以上の坂路が存在するか否かを判定し、前記無人搬送車の前方に前記坂路が存在すると判定したときに、前記坂路で前記駆動輪が上側に位置すると共に前記キャスタが下側に位置するように前記無人搬送車の向きを設定する無人搬送車の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車体に搭載された駆動源により駆動される駆動輪と、車体により旋回自在に支持されたキャスタとを含む無人搬送車の制御装置に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、車体の前側に縦軸回りに旋回自在に支持された前方キャスタと、車体の後ろ側に縦軸回りに旋回自在に支持された後方キャスタと、車体により前後移動可能に支持されると共に車体に推力を与える駆動輪ユニットと、キャスタロック解除装置とを含む無人搬送車が知られている(例えば、特許文献1参照)。この無人搬送車のキャスタロック解除装置は、駆動輪ユニットが前方キャスタおよび後方キャスタの何れか一方側に移動したときに、前方キャスタおよび後方キャスタの他方を車軸方向に回転するようにロックすると共に前方キャスタおよび後方キャスタの一方を縦軸回りに旋回自在にする。すなわち、当該無人搬送車の前進時には、駆動輪ユニットが前方に移動させられ、それに伴って後方キャスタの旋回がロックされると共に前方キャスタが旋回自在になる。また、無人搬送車の後進時には、駆動輪ユニットが後方に移動させられ、前方キャスタの旋回がロックされると共に後方キャスタが旋回自在になる。この結果、無人搬送車の前進時および後進時の双方において、良好な操舵性が確保される。
【先行技術文献】
【特許文献】
【0003】
特開2004-249896号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記無人搬送車では、進行方向前側のキャスタが旋回自在になると共に、進行方向後ろ側のキャスタの旋回がロックされることになる。ただし、当該無人搬送車が登坂路を走行する際には、路面の凹凸や左右の駆動輪の動力差等に起因して車体の向きにズレを生じると、進行方向前側のキャスタの向きが車体等に作用する重力により変化してしまい、無人搬送車が意図しない方向に進行してしまったり、登坂路でずり下がってしまったりするおそれがある。
【0005】
そこで、本開示は、坂路における無人搬送車の走行安定性を良好に確保することを主目的とする。
【課題を解決するための手段】
【0006】
本開示の無人搬送車の制御装置は、車体に搭載された駆動源により駆動される駆動輪と、前記車体により旋回自在に支持されたキャスタとを含む無人搬送車の制御装置であって、前記無人搬送車の前方に所定勾配以上の坂路が存在するか否かを判定し、前記無人搬送車の前方に前記坂路が存在すると判定したときに、前記坂路で前記駆動輪が上側に位置すると共に前記キャスタが下側に位置するように前記無人搬送車の向きを設定するものである。
【0007】
本開示の無人搬送車の制御装置は、当該無人搬送車の前方に所定勾配以上の坂路が存在すると判定したときに、当該坂路で駆動輪が上側に位置すると共にキャスタが下側に位置するように無人搬送車の向きを設定するものである。これにより、無人搬送車が坂路を走行するときに、重力によるキャスタの向きの変化の影響を低減することができるので、坂路において無人搬送車が意図しない方向に進行してしまったり、ずり下がってしまったりするのを良好に抑制することができる。この結果、本開示の無人搬送車の制御装置によれば、坂路における無人搬送車の走行安定性を良好に確保することが可能になる。
【図面の簡単な説明】
【0008】
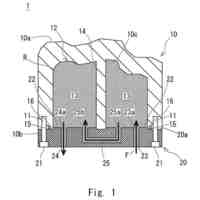
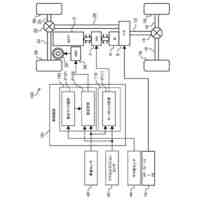
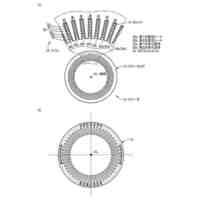
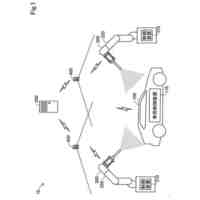
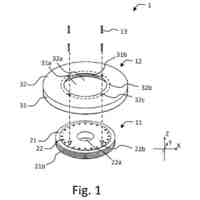
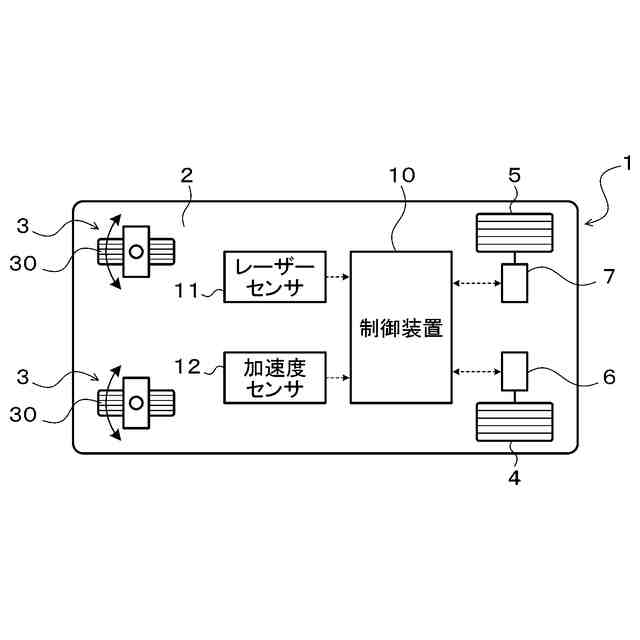
本開示の制御装置を含む無人搬送車の概略構成図である。
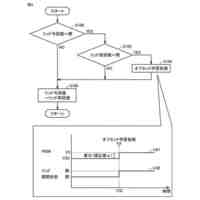
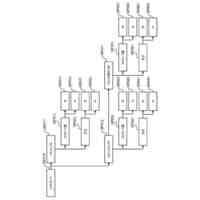
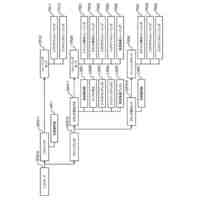
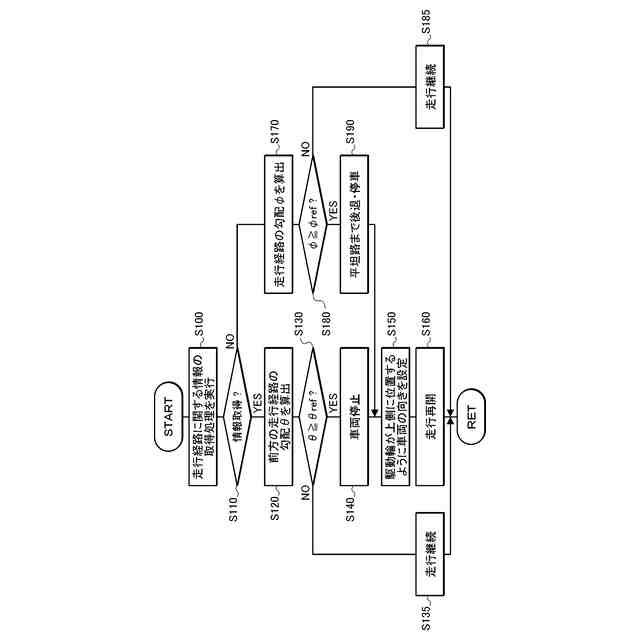
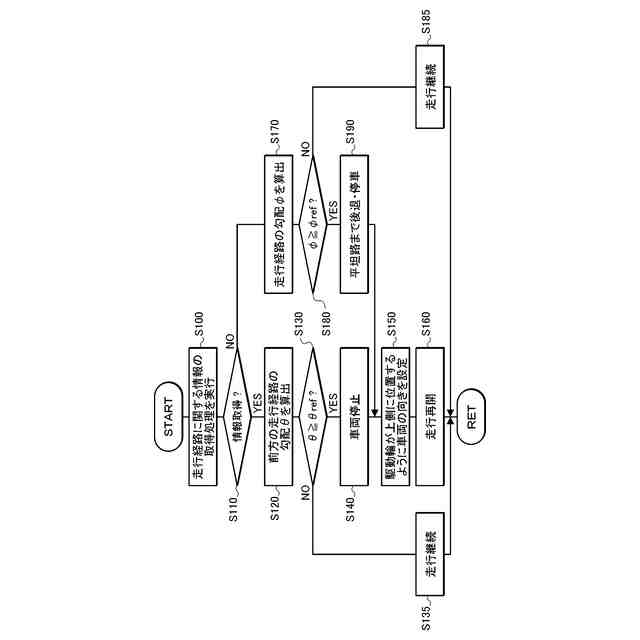
本開示の無人搬送車の制御装置により実行されるルーチンを示すフローチャートである。
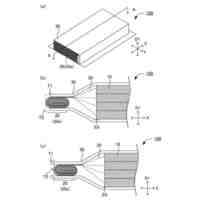
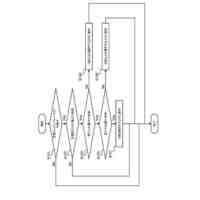
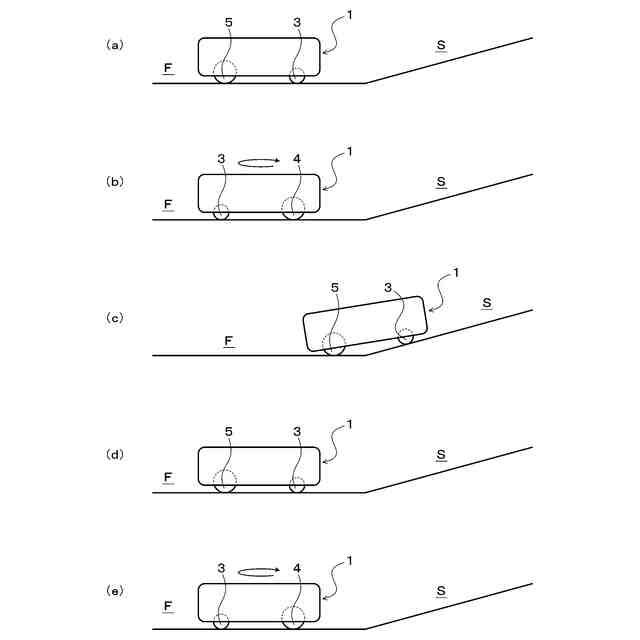
(a),(b),(c),(d)および(e)は、本開示の無人搬送車の制御装置により図2のルーチンが実行されたときの無人搬送車の状態を示す説明図である。
【発明を実施するための形態】
【0009】
次に、図面を参照しながら、本開示の発明を実施するための形態について説明する。
【0010】
図1は、本開示の制御装置10を含む無人搬送車1の概略構成図である。同図に示す無人搬送車1は、例えば工場や、配送センター等の物流施設、大規模商業施設等の敷地内で積荷を搭載して自律走行可能な自立走行搬送ロボット(AMR)である。図示するように、無人搬送車1は、図示しない積荷を搭載可能な車体2と、左右一対のキャスタ3と、左右一対の駆動輪4,5と、一方の駆動輪4を駆動する駆動ユニット6と、他方の駆動輪5を駆動する駆動ユニット7とを含む。更に、無人搬送車1は、駆動ユニット6,7を制御する制御装置10と、無人搬送車1の走行経路情報を取得するためのレーザーセンサ11と、無人搬送車1の前後方向の加速度を検出する加速度センサ12とを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
電池
5日前
トヨタ自動車株式会社
金型
7日前
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
電動車両
2日前
トヨタ自動車株式会社
制御装置
8日前
トヨタ自動車株式会社
ステータ
6日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
電池セル
7日前
トヨタ自動車株式会社
ステータ
2日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
蓄電セル
5日前
トヨタ自動車株式会社
集合導線
8日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
二次電池
7日前
トヨタ自動車株式会社
正極合材
2日前
トヨタ自動車株式会社
蓄電装置
5日前
トヨタ自動車株式会社
蓄電装置
5日前
トヨタ自動車株式会社
ステータ
7日前
トヨタ自動車株式会社
蓄電装置
5日前
トヨタ自動車株式会社
蓄電セル
5日前
トヨタ自動車株式会社
ステータ
7日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
シム構造体
1日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
電気自動車
1日前
トヨタ自動車株式会社
電気自動車
6日前
トヨタ自動車株式会社
電気自動車
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ