TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029728
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023134512
出願日
2023-08-22
発明の名称
物体検知システム、物体検知装置、物体検知方法、及び、プログラム
出願人
日本電気株式会社
代理人
個人
主分類
G01S
17/894 20200101AFI20250228BHJP(測定;試験)
要約
【課題】三次元点群に基づいて物体を検知するに際し、当該物体に対応する三次元点群が得られなくても、当該物体を検知する。
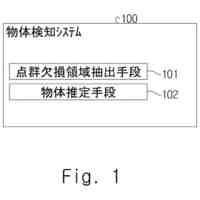
【解決手段】物体検知システムは、三次元点群において点群が欠損している領域である点群欠損領域を抽出する点群欠損領域抽出手段と、前記点群欠損領域に基づいて物体の存在を推定する物体推定手段と、を含む。
【選択図】図1
特許請求の範囲
【請求項1】
三次元点群において点群が欠損している領域である点群欠損領域を抽出する点群欠損領域抽出手段と、
前記点群欠損領域に基づいて物体の存在を推定する物体推定手段と、
を含む、
物体検知システム。
続きを表示(約 1,200 文字)
【請求項2】
前記点群欠損領域は、前記三次元点群に基づいて検出した面内の領域である、
請求項1に記載の物体検知システム。
【請求項3】
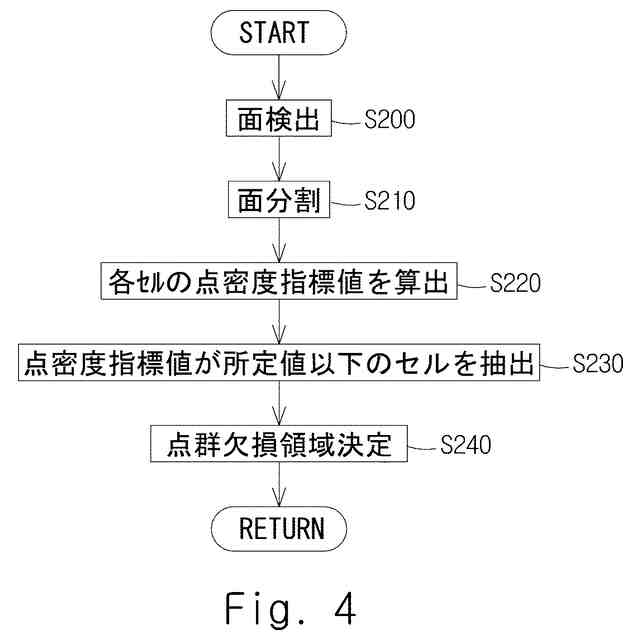
前記点群欠損領域抽出手段は、
前記面を格子状に複数のセルに分割し、
各セルの点密度指標値又は反射輝度指標値を算出し、
前記点密度指標値又は前記反射輝度指標値が所定条件を満たすセルの集合を前記点群欠損領域として抽出する、
請求項2に記載の物体検知システム。
【請求項4】
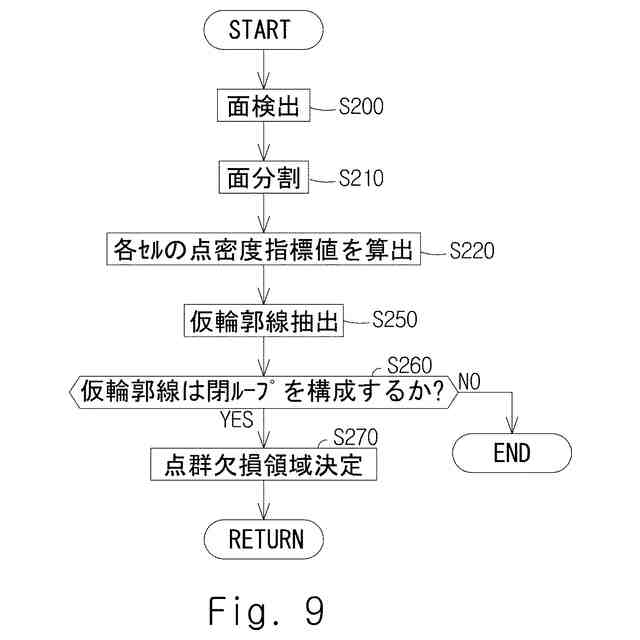
前記点群欠損領域抽出手段は、
前記面を格子状に複数のセルに分割し、
各セルの点密度指標値又は反射輝度指標値を算出し、
隣接する2つのセル間の前記点密度指標値又は前記反射輝度指標値の差分に基づいて前記点群欠損領域の輪郭を検出する、
請求項2に記載の物体検知システム。
【請求項5】
前記物体推定手段は、前記点群欠損領域の長手方向における端部に前記物体が存在していると推定する、
請求項1に記載の物体検知システム。
【請求項6】
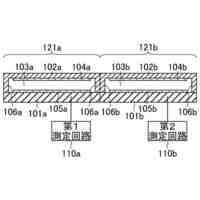
前記点群欠損領域抽出手段は、
前記三次元点群を生成するための測距装置の測距位置が互いに異なる第1の三次元点群及び第2の三次元点群のそれぞれにおいて第1の点群欠損領域及び第2の点群欠損領域を抽出し、
前記物体推定手段は、
前記第1の点群欠損領域及び前記第2の点群欠損領域が重複しており、かつ、前記第1の点群欠損領域の輪郭及び前記第2の点群欠損領域の輪郭が互いに一致しない場合、前記第1の点群欠損領域及び前記第2の点群欠損領域の重複領域に前記物体が存在していると推定する、
請求項1に記載の物体検知システム。
【請求項7】
前記測距装置が移動体に搭載されており前記移動体が移動しながら前記測距装置による測距が行われる場合、
前記第1の三次元点群は、第1の時間帯における測距で得られた点群であり、
前記第2の三次元点群は、前記第1の時間帯以降である第2の時間帯で得られた点群である、
請求項6に記載の物体検知システム。
【請求項8】
三次元点群において点群が欠損している領域である点群欠損領域を抽出する点群欠損領域抽出手段と、
前記点群欠損領域に基づいて物体の存在を推定する物体推定手段と、
を含む、
物体検知装置。
【請求項9】
三次元点群において点群が欠損している領域である点群欠損領域を抽出し、
前記点群欠損領域に基づいて物体の存在を推定する、
物体検知方法。
【請求項10】
コンピュータを、
三次元点群において点群が欠損している領域である点群欠損領域を抽出する点群欠損領域抽出手段と、
前記点群欠損領域に基づいて物体の存在を推定する物体推定手段と、
として機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体検知システム、物体検知装置、物体検知方法、及び、プログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
特許文献1は、三次元点群に基づいて、電柱や信号機、ガードレールを検出する技術を開示している。
【先行技術文献】
【特許文献】
【0003】
特開2019-3527号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、三次元点群を生成する手段としてLiDAR装置(light detection and ranging)が知られている。LiDAR装置は、レーザー光を用いることで測距対象の三次元点群を生成する。ここで、LiDAR装置は、測距対象に向かって出射したレーザー光が測距対象の表面で反射して再びLiDAR装置に入力されることを前提とした測距装置である。
【0005】
従って、LiDAR装置から出射されたレーザー光を鏡面反射するような金属物体が測距対象に含まれていた場合、当該金属物体に対応する三次元点群が生成されないので、三次元点群に基づいて当該金属物体を検知することができない。この問題は、例えば炭のようにLiDAR装置から出射されたレーザー光を反射し難い黒体(black body)でも同じことが言える。
【0006】
本開示の目的は、三次元点群に基づいて物体を検知するに際し、当該物体に対応する三次元点群が得られなくても、当該物体を検知する技術を提供することにある。
【課題を解決するための手段】
【0007】
本開示によれば、三次元点群において点群が欠損している領域である点群欠損領域を抽出する点群欠損領域抽出手段と、前記点群欠損領域に基づいて物体の存在を推定する物体推定手段と、を含む、物体検知システムが提供される。
【0008】
三次元点群において点群が欠損している領域である点群欠損領域を抽出する点群欠損領域抽出手段と、
前記点群欠損領域に基づいて物体の存在を推定する物体推定手段と、
を含む、
物体検知装置が提供される。
【0009】
三次元点群において点群が欠損している領域である点群欠損領域を抽出し、
前記点群欠損領域に基づいて物体の存在を推定する、
物体検知方法が提供される。
【0010】
コンピュータを、
三次元点群において点群が欠損している領域である点群欠損領域を抽出する点群欠損領域抽出手段と、
前記点群欠損領域に基づいて物体の存在を推定する物体推定手段と、
として機能させるプログラムが提供される。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
ボロメータ及び製造方法
2日前
日本電気株式会社
監視装置および監視方法
3日前
日本電気株式会社
通信システム及び通信制御方法
6日前
日本電気株式会社
情報処理装置、方法及びプログラム
2日前
日本電気株式会社
需要予測装置、需要予測方法、及びプログラム
2日前
日本電気株式会社
デジタル署名システムと方法並びにプログラム
2日前
日本電気株式会社
雑音抑圧装置、雑音抑圧方法、及びプログラム
2日前
日本電気株式会社
需要予測装置、需要予測方法、及びプログラム
2日前
日本電気株式会社
情報表示装置、情報表示方法、及びプログラム
2日前
日本電気株式会社
情報処理システム、情報処理方法及びプログラム
9日前
日本電気株式会社
商品検索装置、商品検索方法、およびプログラム
6日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
9日前
日本電気株式会社
サーバ装置、サーバ装置の制御方法及びプログラム
2日前
日本電気株式会社
搬送機の制御システム、搬送機の制御方法、及び搬送機
2日前
日本電気株式会社
イベント検出装置、イベント検出方法、およびプログラム
9日前
日本電気株式会社
演算装置、学習装置、演算方法、学習方法およびプログラム
2日前
日本電気株式会社
情報処理装置
11日前
日本電気株式会社
情報処理装置、情報処理システム、情報処理方法、及びプログラム
2日前
日本電気株式会社
物体検知システム、物体検知装置、物体検知方法、及び、プログラム
2日前
日本電気株式会社
データ表示システム、データ表示装置、データ表示方法、及び、プログラム
2日前
日本電気株式会社
コアネットワークノードおよびその方法
4日前
日本電気株式会社
端末、情報処理方法、およびプログラム
11日前
日本電気株式会社
商品推奨装置、方法、およびプログラム
9日前
日本電気株式会社
情報処理装置、情報処理方法及びプログラム
16日前
NECスペーステクノロジー株式会社
衛星通信システムにおける障害物サーチ方法および装置
2日前
NECスペーステクノロジー株式会社
衛星通信システムにおける通信制御装置および通信制御方法
2日前
日本電気株式会社
情報処理システム、精算支援方法、およびプログラム
9日前
日本電気株式会社
検出システム、学習方法、及びコンピュータプログラム
2日前
日本電気株式会社
撮像システム、撮像方法、及びコンピュータプログラム
2日前
株式会社大真空
センサ
9日前
株式会社大真空
センサ
1か月前
ユニパルス株式会社
ロードセル
1か月前
東レ株式会社
液体展開用シート
24日前
株式会社ミツトヨ
エンコーダ
3日前
アズビル株式会社
圧力センサ
2日前
株式会社トプコン
植物センサ
20日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ