TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025021563
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023125348
出願日
2023-08-01
発明の名称
監視領域設定装置および監視領域設定方法
出願人
北陽電機株式会社
代理人
個人
主分類
B61B
1/02 20060101AFI20250206BHJP(鉄道)
要約
【課題】安全柵の設置精度にばらつきがあっても、現場で柵を作動させながら測定し、或いは、治具を用いて監視領域の適正度を判定しながら数値入力を繰り返す煩雑な作業を不要とする監視領域設定装置を提供する。
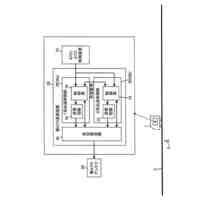
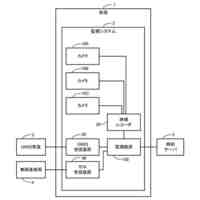
【解決手段】LiDARにより得られる可動柵と床面の表面を示す点群データを取得する点群データ取得部と、点群データに基づいて複数の面を取得する面取得部と、取得した複数の面を所定の条件下でラベリングして可動柵と床面を識別するラベリング部と、ラベリングされた可動柵と床面を含む複数の面に基づいて支障物を検知するための監視領域を設定する監視領域設定部とを備え、監視領域設定部は、ラベリング部によりラベリングされた複数の扉面の法線ベクトルと床面に設定した基準ベクトルとに基づいて、床面に対する各扉面の立上り角度を整合させ、整合させた各扉面に基づいて前記監視領域を設定する監視領域設定装置。
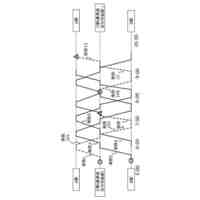
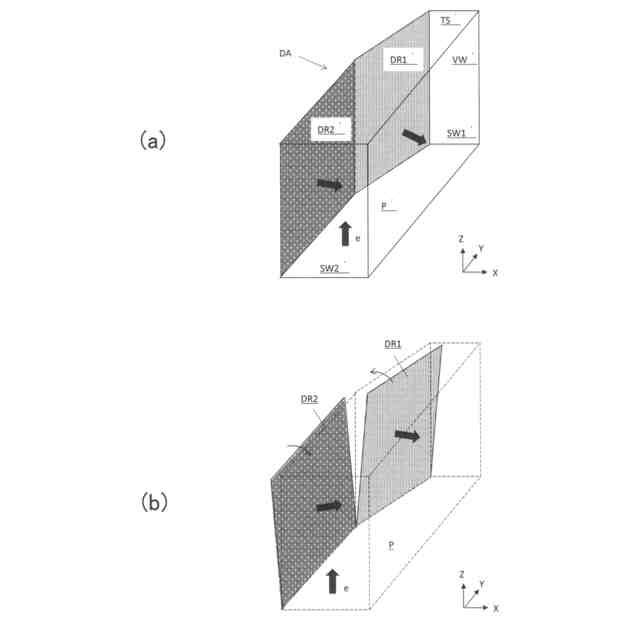
【選択図】図3
特許請求の範囲
【請求項1】
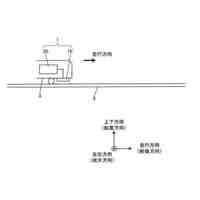
乗降領域への入場を規制する閉止状態の可動柵と前記可動柵が設置された床面とを含む基準被測定物が存在する監視対象空間をLiDARにより走査して、得られる距離画像から前記基準被測定物を含む物体の表面を示す点群データを取得する点群データ取得部と、
前記点群データ取得部で取得した前記点群データのうち所定の注目点および各注目点の近傍点で生成される注目面に対する法線を各注目点における法線ベクトルとして取得する処理を各注目点に対して実行し、取得した各法線ベクトルの一致度に基づいて各注目点の何れかを含む複数の面を取得する面取得処理を実行する面取得部と、
前記面取得部で取得した複数の面を、予め設定した基準ベクトルと前記面取得部が取得した前記複数の面の法線ベクトルとに基づいて、前記複数の面から前記床面を識別するとともに、前記可動柵を構成する複数の扉の閉止位置に対応する扉面とを識別してラベリングするラベリング部と、
前記ラベリング部によりラベリングされた複数の面に基づいて、前記乗降領域に支障物が存在するか否かを検知するための監視領域を設定する監視領域設定部と、
を備え、
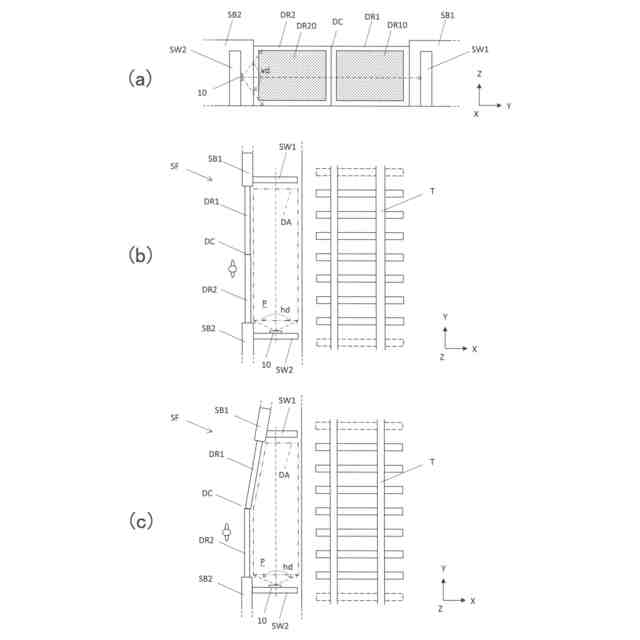
前記監視領域設定部は、前記ラベリング部によりラベリングされた複数の扉面の法線ベクトルと前記基準ベクトルとに基づいて、前記床面に対する各扉面の立上り角度を整合させ、整合させた各扉面に基づいて前記監視領域を設定するように構成されている監視領域設定装置。
続きを表示(約 1,600 文字)
【請求項2】
前記ラベリング部は、予め入力される前記複数の扉の閉止位置に対応する位置情報に基づいて各扉面を識別する請求項1記載の監視領域設定装置。
【請求項3】
前記ラベリング部は、前記面取得部が取得した前記複数の面の相対的な偏倚に基づいて各扉面を識別する請求項1記載の監視領域設定装置。
【請求項4】
前記ラベリング部は、前記点群データ取得部で取得した点群データに基づいて前記床面の境界線を取得し、前記境界線を通り前記床面と交差する交差面を生成し、前記床面と前記交差面とを識別してラベリングする請求項1から3の何れかに記載の監視領域設定装置。
【請求項5】
前記面取得処理は、特定の注目点から所定の探索範囲に存在する他の注目点における法線ベクトルが、前記特定の注目点の法線ベクトルの向きに対して所定の許容範囲の傾きに収まる場合に、当該他の注目点を前記特定の注目点と同一のグループとするクラスタリング処理を含む請求項4記載の監視領域設定装置。
【請求項6】
前記面取得処理は、各注目点を前記特定の注目点として前記クラスタリング処理を繰返し、後のクラスタリング処理でグループ化される注目点の何れかが先のクラスタリング処理で既にグループ化されている場合に、当該後のクラスタリング処理でグループ化される全ての注目点を当該先のクラスタリング処理と同一のグループに統合する統合処理を含む請求項5記載の監視領域設定装置。
【請求項7】
前記面取得処理は、前記クラスタリング処理によって生成された複数のグループの其々に対してグループを代表する代表法線ベクトルを求め、其々の代表法線ベクトルが所定の許容範囲に収まるグループを同一のグループに統合する統合処理を含む請求項6記載の監視領域設定装置。
【請求項8】
前記面取得処理は、前記同一グループにグループ化された注目点にフィルタリング処理を実行して当該同一グループから外れ値を除去する請求項7記載の監視領域設定装置。
【請求項9】
乗降領域への入場を規制する閉止状態の可動柵と前記可動柵が設置された床面とを含む基準被測定物が存在する監視対象空間をLiDARにより走査して、得られる距離画像から前記基準被測定物を含む物体の表面を示す点群データを取得する点群データ取得ステップと、
前記点群データ取得ステップで取得した前記点群データのうち所定の注目点および各注目点の近傍点で生成される注目面に対する法線を各注目点における法線ベクトルとして取得する処理を各注目点に対して実行し、取得した各法線ベクトルの一致度に基づいて各注目点の何れかを含む複数の面を取得する面取得処理を実行する面取得ステップと、
前記面取得ステップで取得した複数の面を、予め設定した基準ベクトルと前記面取得部が取得した前記複数の面の法線ベクトルとに基づいて、前記複数の面から前記床面を識別するとともに、前記可動柵を構成する複数の扉の閉止位置に対応する扉面とを識別してラベリングするラベリングステップと、
前記ラベリングステップによりラベリングされた複数の面に基づいて、前記乗降領域に支障物が存在するか否かを検知するための監視領域を設定する監視領域設定ステップと、
を備え、
前記監視領域設定ステップは、前記ラベリングステップによりラベリングされた複数の扉面の法線ベクトルと前記基準ベクトルとに基づいて、前記床面に対する各扉面の立上り角度を整合させ、整合させた各扉面に基づいて前記監視領域を設定するように構成されている監視領域設定方法。
【請求項10】
前記ラベリングステップは、予め入力される前記複数の扉の閉止位置に対応する位置情報に基づいて各扉面を識別する請求項9記載の監視領域設定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、監視領域設定装置および監視領域設定方法に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
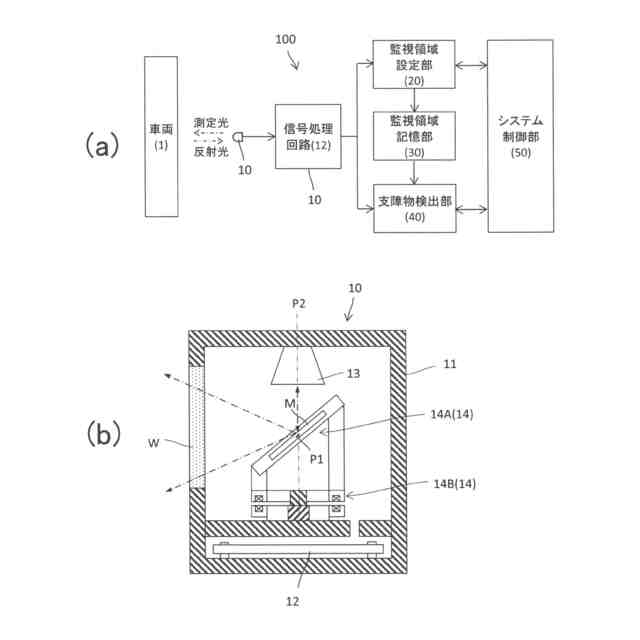
特許文献1には、三次元距離画像センサを有し、車両が停車するホームのホームドアに設置される支障物検知装置の検知エリア(監視領域)を生成するシステムであって、前記支障物検知装置に配置され、前記検知エリアの境界を含むように三次元距離画像を取得可能な前記三次元距離画像センサと、前記三次元距離画像を記憶する記憶部と、前記記憶部に記憶された前記三次元距離画像に基づいて、前記検知エリアを生成する演算部と、を備えるシステムが提案されている。
【0003】
特許文献2には、検知エリア(監視領域)の設定対象となる基準被測定物を含む領域に照射した測定光に対する反射光に基づいて、前記基準被測定物の表面上の反射点を含む測距点の座標を示す3次元の点群データを取得する点群データ取得部と、前記点群データ取得部で取得した点群データに基づいて、前記基準被測定物の表面を含む複数の面を取得する面取得部と、前記面取得部で取得した複数の面を所定の条件下でラベリングするラベリング部と、前記ラベリング部によりラベリングされた前記複数の面に基づいて、支障物を検知するための前記検知エリアを設定するエリア設定部と、と備えて構成され、前記面取得部は、前記点群データに含まれる複数の測距点のうち注目点および前記注目点の近傍点で生成される注目面に対する法線を当該注目点における法線ベクトルとして取得する処理を複数の注目点に対して実行し、各法線ベクトルに基づいて各注目点の何れかを含む複数の面を取得する面取得処理を実行することを特徴とする検知エリア設定装置が提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-19380号公報
特開2022-187965号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
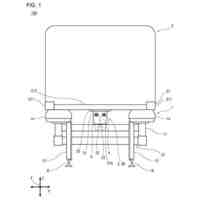
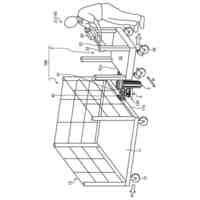
特許文献1に開示された支障物検知装置の検知エリアを生成するシステムは、車両が軌道上を走行している時に、軌道側の境界を含むように三次元距離画像を取得し、或いは、車両の輪郭を模擬した車両治具を軌道上に走行させて、軌道側の境界を含むように三次元距離画像を取得する必要があり、ホームドアのドアパネルを開閉作動させて、ホームドア側の検知エリアの境界を含むように、三次元距離画像を取得する必要があり、プラットホームに設置された多数のホームドアに対して個別に三次元距離画像を取得するのは、非常に煩雑な手間を要するという問題があった。
【0006】
特許文献2に開示された検知エリア設定装置では、軌道に沿うホーム長手方向の距離や、ホーム端から安全柵(ホームドア)までの奥行方向の距離は、設計情報に基づいて数値入力されているので、検知エリア設定に要する手間は非常に軽減される。
【0007】
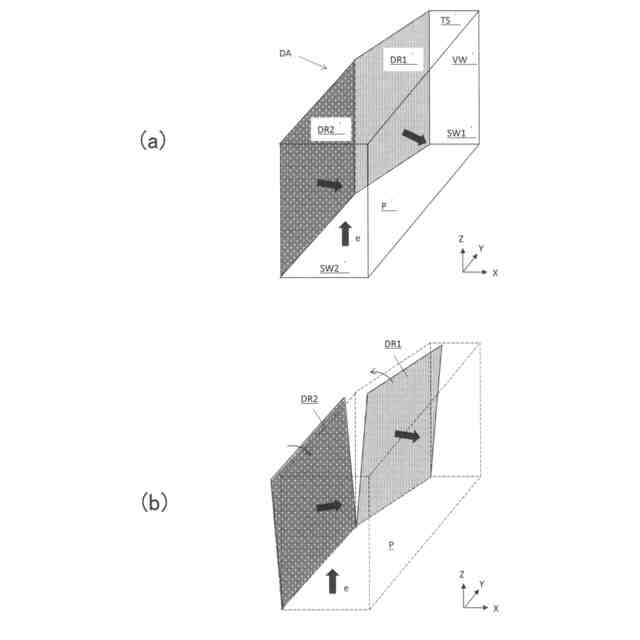
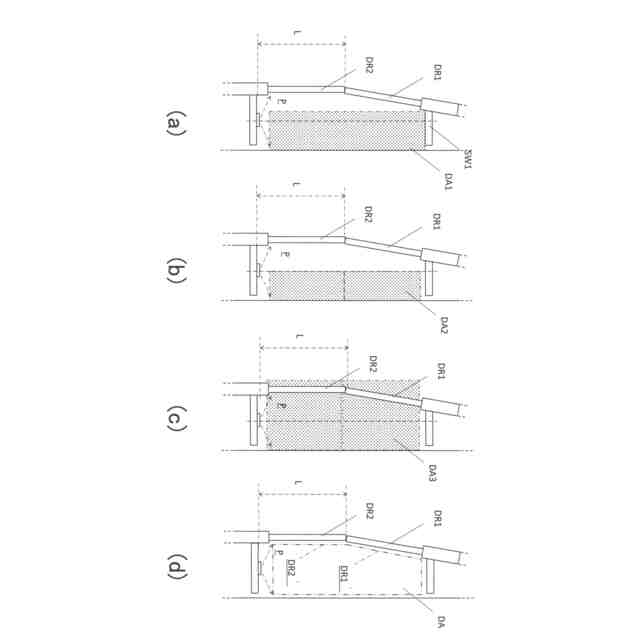
しかし、プラットホームに設置される多数の安全柵は、既存のプラットホーム上に後付けで設置されるため、施工時に現場合わせが必要となり、設置精度はそれほど高いものではなかった。そのため、設計情報に基づいて入力された数値で生成された略直方体形状の検知エリアでは、安全柵特に可動柵の可動域と整合せず、可動柵が支障物として誤検出されるという虞があり、検知エリアを小さくすると、広範囲の死角が生じる虞があった。そこで、現場で治具を用いて検知エリアの適正度を判定しながら数値入力を繰り返す必要があり、特許文献1と同様に、非常に煩雑な手間を要するという問題が出現した。
【0008】
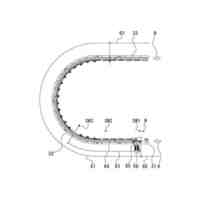
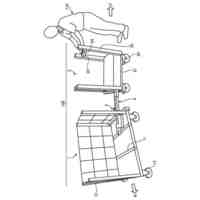
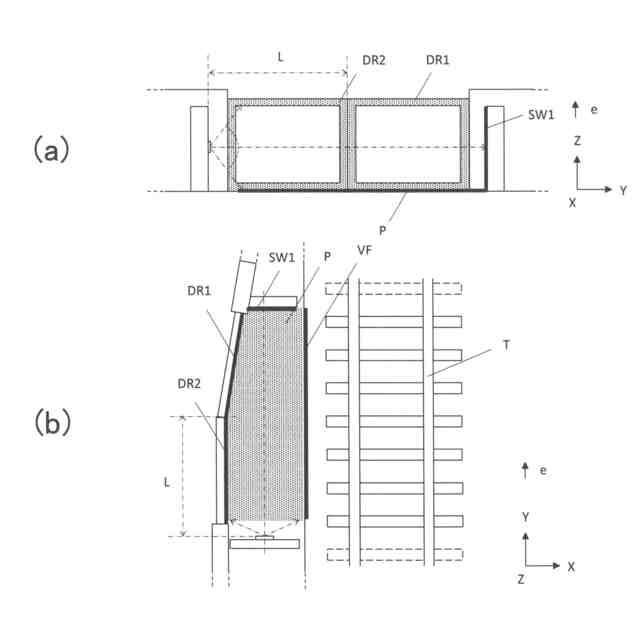
例えば、先頭車両や後端車両に対応する安全柵では、乗務員の車両への乗降に要する空間を確保するため、ホーム端と安全柵の間のスペースが他より広く設定される場合がある。その結果、左右の可動柵の先端(戸先)が角度をもって接合されることになる。また、中央側の車両に対応する安全柵でも、プラットホームの水平度にばらつきがあり、またホーム端が直線ではなく湾曲している場合もあるため、設計値に従って安全柵を設置しても、左右の可動柵の先端(戸先)が適切に合致せず、ずれが生じる場合がある。そのような場合には、現場合わせする必要があり、結果として可動柵がホーム面(床面)に対して傾斜することがある。
【0009】
本発明の目的は、安全柵の設置精度にばらつきがあっても、現場で柵を作動させながら測定し、或いは、治具を用いて監視領域(検知エリア)の適正度を判定しながら数値入力を繰り返す煩雑な作業を不要とする監視領域設定装置および監視領域設定方法を提供する点にある。
【課題を解決するための手段】
【0010】
上述の目的を達成するため、本発明による監視領域設定装置の第一の特徴構成は、乗降領域への入場を規制する閉止状態の可動柵と前記可動柵が設置された床面とを含む基準被測定物が存在する監視対象空間をLiDARにより走査して、得られる距離画像から前記基準被測定物を含む物体の表面を示す点群データを取得する点群データ取得部と、前記点群データ取得部で取得した前記点群データのうち所定の注目点および各注目点の近傍点で生成される注目面に対する法線を各注目点における法線ベクトルとして取得する処理を各注目点に対して実行し、取得した各法線ベクトルの一致度に基づいて各注目点の何れかを含む複数の面を取得する面取得処理を実行する面取得部と、前記面取得部で取得した複数の面を、予め設定した基準ベクトルと前記面取得部が取得した前記複数の面の法線ベクトルとに基づいて、前記複数の面から前記床面を識別するとともに、前記可動柵を構成する複数の扉の閉止位置に対応する扉面とを識別してラベリングするラベリング部と、前記ラベリング部によりラベリングされた複数の面に基づいて、前記乗降領域に支障物が存在するか否かを検知するための監視領域を設定する監視領域設定部と、を備え、前記監視領域設定部は、前記ラベリング部によりラベリングされた複数の扉面の法線ベクトルと前記基準ベクトルとに基づいて、前記床面に対する各扉面の立上り角度を整合させ、整合させた各扉面に基づいて前記監視領域を設定するように構成されている点にある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎車両株式会社
鉄道車両用パネル
1か月前
日本信号株式会社
ホーム安全システム
1日前
日本製鉄株式会社
鉄道車両
1か月前
日本製鉄株式会社
鉄道車両
1か月前
株式会社京三製作所
車上装置
22日前
株式会社京三製作所
情報伝送装置
16日前
日本ケーブル株式会社
自動循環式索道の搬器間隔規制装置
2日前
日本製鉄株式会社
車輪径の管理方法
28日前
近畿車輌株式会社
鉄道車両の引戸構造
28日前
日本精工株式会社
台車搬送装置
10日前
日本精工株式会社
台車搬送装置
10日前
日本車輌製造株式会社
台車用負荷装置
14日前
日本車輌製造株式会社
鉄道車両
2日前
中西金属工業株式会社
コンベア用キャリア
21日前
沖電気工業株式会社
移動体位置検出システム
17日前
大同信号株式会社
連動装置及び連動制御方法
1か月前
日本車輌製造株式会社
鉄道車両及びその製造方法
23日前
日本電気株式会社
前方監視システム、前方監視装置、前方監視方法、及び、プログラム
1か月前
川崎車両株式会社
鉄道車両用台車枠及び鉄道車両用台車枠の製造方法
1か月前
東芝インフラシステムズ株式会社
線路検出装置および線路検出方法
2日前
日本電気株式会社
障害物監視システム、障害物監視装置、障害物監視方法、及び、プログラム
7日前
株式会社日立製作所
運転実績振り返り支援システムおよび運転実績振り返り支援方法
1日前
株式会社日立製作所
走行パターン生成装置、車両及び走行パターン生成方法
14日前
株式会社東芝
情報処理装置、情報処理方法及びコンピュータプログラム
7日前
株式会社東芝
情報処理装置、情報処理方法及びコンピュータプログラム
10日前
株式会社東芝
情報処理装置、情報処理方法及びコンピュータプログラム
7日前
ビーエヌエスエフ レイルウェイ カンパニー
保線をスケジューリングするためのシステム及び方法
9日前
パナソニックIPマネジメント株式会社
監視装置、監視システム、監視方法、及び、コンピュータプログラム
24日前
シュナイダー,ダニエル ジェイ
改良されたインターモーダル輸送システム
9日前
株式会社JR東日本テクノハートTESSEI
汚物処理装置、汚物抜き取り装置およびタンク給水装置
28日前
チョーチアン ヘンイー ペトロケミカル カンパニー,リミテッド
搬送車
14日前
株式会社SPACER
情報処理装置、情報処理方法及びプログラム
8日前
他の特許を見る
 特許ウォッチ
特許ウォッチ