TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019693
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123433
出願日
2023-07-28
発明の名称
ずり搬出システムにおけるずり積込み機およびその自動運転制御方法
出願人
株式会社フジタ
,
株式会社三井三池製作所
代理人
個人
主分類
E21D
9/12 20060101AFI20250131BHJP(地中もしくは岩石の削孔;採鉱)
要約
【課題】ずり搬出待ちによるサイクルロスを抑制してトンネル工事の施工期間の短縮化を達成できるずり積込み機を提供する。
【解決手段】ホイールローダが所定地点に運搬したずりを掻き込んで後続搬送装置に積載するずり積込み機であって、自動運転制御装置250が、ホイールローダからずり積載終了通知を受信すると、可視光カメラS22およびサーマルカメラS23によりそれぞれ得られる画像データ並びに3次元スキャナS21により得られる3次元データに基づいて所定地点のずり領域を認識し、ずり仮置き場のずり領域のずりを掻き込んで後続搬送装置へ積み込み、後続搬送装置に所定量のずりが積み込まれることでずり掻き込み機構および積込み機構を停止する。
【選択図】図10
特許請求の範囲
【請求項1】
切羽と坑口との間に前記切羽から前記坑口へ向けて少なくともホイールローダ、ずり積込み機および後続搬送装置を配置し、前記切羽前のずりを少なくとも前記ホイールローダ、前記ずり積込み機および前記後続搬送装置を通して坑口へ搬送するトンネル工事におけるずり搬出システムにおける前記ずり積込み機であって、
少なくとも前記ホイールローダにより前記ずり積込み機の前記切羽側にある所定地点に積載されたずりを掻き込むずり掻き込み機構と、
前記刷り掻き込み機能により掻き込まれたずりを前記後続搬送装置へ積み込む積込み機構と、
3次元スキャナ、可視光カメラおよびサーマルカメラを含むセンサ部と、
前記ホイールローダおよび前記後続搬送装置と通信可能な通信部と、
前記センサ部の出力に基づいて、前記ずり掻き込み機構および前記積込み機構を制御する自動運転制御部と、
を有し、
前記自動運転制御部が、
a)前記ホイールローダからずり積載終了通知を受信すると、前記3次元スキャナにより得られる3次元データと、前記可視光カメラおよび前記サーマルカメラによりそれぞれ得られる画像データと、に基づいて前記所定地点のずりを認識し、
b)前記ずり掻き込み機構および前記積込み機構を駆動し、前記所定地点のずりを掻き込んで前記後続搬送装置へ積み込み、
c)前記後続搬送装置に所定量のずりが積み込まれることで前記ずり掻き込み機構および前記積込み機構を停止する、
ことを特徴とするずり積込み機。
続きを表示(約 1,600 文字)
【請求項2】
前記後続搬送装置のずり積載部を撮像する可視光カメラを含む第2センサ部を更に有し、前記自動運転制御部が、前記第2センサ部により得られた画像データに基づいて前記後続搬送装置のずり積載状況を認識する、ことを特徴とする請求項1記載のずり積込み機。
【請求項3】
前記通信部を通して前記後続搬送装置から前記所定量のずりが積み込まれたことを示す積込み終了通知を受信すると、前記自動運転制御部が前記ずり掻き込み機構および前記積込み機構を停止する、ことを特徴とする請求項1記載のずり積込み機。
【請求項4】
前記ずり積込み機を移動させる走行機構を更に有し、前記自動運転制御部が前記3次元スキャナからの3次元データに基づいて前記走行機構を制御する、ことを特徴とする請求項1-3のいずれか1項記載のずり積込み機。
【請求項5】
前記積込み機構のずりを撮像する3次元スキャナ、可視光カメラおよびサーマルカメラを含む第3センサ部をさらに有し、前記自動運転制御部が、前記第3センサ部により得られた3次元データおよび画像データに基づいて、前記積込み機構のずり積載状況を認識する、ことを特徴とする請求項1-3のいずれか1項記載のずり積込み機。
【請求項6】
前記自動運転制御部が、前記積込み機構のずり積載状況に応じて前記ずり掻き込み機構および前記積込み機構の動作速度を調整することを特徴とする請求項5記載のずり積込み機。
【請求項7】
前記後続搬送装置は、ずり運搬車、クラッシャおよびダンプの少なくとも1つを含むことを特徴とする請求項1-3のいずれか1項記載のずり積込み機。
【請求項8】
切羽と坑口との間に前記切羽から前記坑口へ向けて少なくともホイールローダ、ずり積込み機および後続搬送装置を配置し、前記切羽前のずりを少なくとも前記ホイールローダ、前記ずり積込み機および前記後続搬送装置を通して坑口へ搬送するトンネル工事におけるずり搬出システムにおける前記ずり積込み機の自動運転制御方法であって、
前記ずり積込み機が、前記切羽側にある所定地点に少なくとも前記ホイールローダにより積載されたずりを掻き込むずり掻き込み機構と、前記ずり掻き込み機能により掻き込まれたずりを前記後続搬送装置へ積み込む積込み機構と、3次元スキャナ、可視光カメラおよびサーマルカメラを含むセンサ部と、前記ホイールローダおよび前記後続搬送装置と通信可能な通信部と、プロセッサ部と、を有し、
前記プロセッサ部が、
a)前記ホイールローダからずり積載終了通知を受信すると、前記3次元スキャナにより得られる3次元データと、前記可視光カメラおよび前記サーマルカメラによりそれぞれ得られる画像データと、に基づいて、前記所定地点のずりを認識し、
b)前記ずり掻き込み機構および前記積込み機構を駆動し、前記所定地点のずりを掻き込んで前記後続搬送装置へ積み込み、
c)前記後続搬送装置に所定量のずりが積み込まれることで前記ずり掻き込み機構および前記積込み機構を停止する、
ことを特徴とするずり積込み機の自動運転制御方法。
【請求項9】
前記後続搬送装置のずり積載部を撮像する可視光カメラを含む第2センサ部を更に有し、前記プロセッサ部が、前記第2センサ部により得られた画像データに基づいて前記後続搬送装置のずり積載状況を認識する、ことを特徴とする請求項8記載のずり積込み機の自動運転制御方法。
【請求項10】
前記通信部を通して前記後続搬送装置から前記所定量のずりが積み込まれたことを示す積込み終了通知を受信すると、前記プロセッサ部が前記ずり掻き込み機構および前記積込み機構を停止する、ことを特徴とする請求項8記載のずり積込み機の自動運転制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明はずり搬出システムに係り、特にずり仮置き場からずり運搬機へずりを積み込むずり積込み機の自動運転技術に関する。
続きを表示(約 5,700 文字)
【背景技術】
【0002】
山岳地のトンネル工事では、岩盤を掘削する工法として発破工法が採用されている。発破により切羽前に発生したずりは速やかに坑口へ搬出される必要である。このずり搬出作業はトンネル施工サイクルにおいて大きなウェイトを占める。そこでトンネル工事の工期短縮のために効率的なずり搬出システムがいくつか提案されている。
【0003】
特許文献1に開示されたずり搬出方法によれば、切羽とクラッシャーとの中間地点にずり仮置き場を設け、そこにずり積込み機を配置し、さらにずり積込み機の坑口側にずり運搬車を配置する。ホイールローダは切羽前とずり仮置き場との間を往復し、発破により生じた切羽前のずりをずり仮置き場まで運搬して積載する。ずり積込み機は、ずり仮置き場に積載されたずりを掻き込んでずり運搬車に積載する。ずり運搬車はずり積込み機とクラッシャとの間を往復し、積載されたずりをクラッシャに投入する。クラッシャにより破砕されたずりは連続ベルトコンベア装置によって坑口に向けて搬送される。
【0004】
このように切羽とクラッシャとの中間地点にずり仮置き場を設け、そこにずり積込み機を配置することで、爆破工程後の切羽のずりの後処理を従来に比べて短時間で済ませることができ、トンネル工事の効率化、ひいてはトンネル工事の施工期間の短縮化およびコストダウンを達成できる。
【先行技術文献】
【特許文献】
【0005】
特開2011-047209号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、ホイールローダによるずり搬送は発破直後のトンネル素掘り面での作業となり、狭い限られた空間での往復移動を強いられる。このためにホイールローダが切羽前のずりを積載してずり仮置き場まで運搬するための時間は一定ではなく状況によって変動する。このような作業の時間的な変動は、ずり積込み機の作業および後段のずり運搬車の作業にズリ運搬待ちによるサイクルロスを発生させ、トンネル工事の施工期間の更なる短縮化を困難にしていた。
【0007】
本発明は前記事情に鑑み案出されたものであり、その目的は、ずり搬出待ちによるサイクルロスを抑制してトンネル工事の施工期間の短縮化を達成できるずり搬出システム、ずり積込み機およびその自動運転制御方法を提供することにある。
【課題を解決するための手段】
【0008】
上述の目的を達成するため、本発明は、切羽と坑口との間に前記切羽から前記坑口へ向けて少なくともホイールローダ、ずり積込み機および後続搬送装置を配置し、前記切羽前のずりを少なくとも前記ホイールローダ、前記ずり積込み機および前記後続搬送装置を通して坑口へ搬送するトンネル工事におけるずり搬出システムにおける前記ずり積込み機であって、少なくとも前記ホイールローダにより前記ずり積込み機の前記切羽側にある所定地点に積載されたずりを掻き込むずり掻き込み機構と、前記刷り掻き込み機能により掻き込まれたずりを前記後続搬送装置へ積み込む積込み機構と、3次元スキャナ、可視光カメラおよびサーマルカメラを含むセンサ部と、前記ホイールローダおよび前記後続搬送装置と通信可能な通信部と、前記センサ部の出力に基づいて、前記ずり掻き込み機構および前記積込み機構を制御する自動運転制御部と、を有し、前記自動運転制御部が、a)前記ホイールローダからずり積載終了通知を受信すると、前記3次元スキャナにより得られる3次元データと、前記可視光カメラおよび前記サーマルカメラによりそれぞれ得られる画像データと、に基づいて前記所定地点のずりを認識し、b)前記ずり掻き込み機構および前記積込み機構を駆動し、前記所定地点のずりを掻き込んで前記後続搬送装置へ積み込み、c)前記後続搬送装置に所定量のずりが積み込まれることで前記ずり掻き込み機構および前記積込み機構を停止する、ことを特徴とする。
本発明の一態様によれば、前記後続搬送装置のずり積載部を撮像する可視光カメラを含む第2センサ部を更に有し、前記自動運転制御部が、前記第2センサ部により得られた画像データに基づいて前記後続搬送装置のずり積載状況を認識することができる。
本発明の一態様によれば、前記通信部を通して前記後続搬送装置から前記所定量のずりが積み込まれたことを示す積込み終了通知を受信すると、前記自動運転制御部が前記ずり掻き込み機構および前記積込み機構を停止することができる。
本発明の一態様によれば、前記ずり積込み機を移動させる走行機構を更に有し、前記自動運転制御部が前記3次元スキャナからの3次元データに基づいて前記走行機構を制御することができる。
本発明の一態様によれば、前記積込み機構のずりを撮像する3次元スキャナ、可視光カメラおよびサーマルカメラを含む第3センサ部をさらに有し、前記自動運転制御部が、前記第3センサ部により得られた3次元データおよび画像データに基づいて、前記積込み機構のずり積載状況を認識することができる。
本発明の一態様によれば、前記自動運転制御部が、前記積込み機構のずり積載状況に応じて前記ずり掻き込み機構および前記積込み機構の動作速度を調整することができる。
本発明の一態様によれば、前記後続搬送装置はずり運搬車、クラッシャおよびダンプの少なくとも1つを含むことができる。
上述の目的を達成するため、本発明は、切羽と坑口との間に前記切羽から前記坑口へ向けて少なくともホイールローダ、ずり積込み機および後続搬送装置を配置し、前記切羽前のずりを少なくとも前記ホイールローダ、前記ずり積込み機および前記後続搬送装置を通して坑口へ搬送するトンネル工事におけるずり搬出システムにおける前記ずり積込み機の自動運転制御方法であって、前記ずり積込み機が、前記切羽側にある所定地点に少なくとも前記ホイールローダにより積載されたずりを掻き込むずり掻き込み機構と、前記ずり掻き込み機能により掻き込まれたずりを前記後続搬送装置へ積み込む積込み機構と、3次元スキャナ、可視光カメラおよびサーマルカメラを含むセンサ部と、前記ホイールローダおよび前記後続搬送装置と通信可能な通信部と、プロセッサ部と、を有し、前記プロセッサ部が、a)前記ホイールローダからずり積載終了通知を受信すると、前記3次元スキャナにより得られる3次元データと、前記可視光カメラおよび前記サーマルカメラによりそれぞれ得られる画像データと、に基づいて、前記所定地点のずりを認識し、b)前記ずり掻き込み機構および前記積込み機構を駆動し、前記所定地点のずりを掻き込んで前記後続搬送装置へ積み込み、c)前記後続搬送装置に所定量のずりが積み込まれることで前記ずり掻き込み機構および前記積込み機構を停止する、ことを特徴とする。
本発明の一態様によれば、前記後続搬送装置のずり積載部を撮像する可視光カメラを含む第2センサ部を更に有し、前記自動運転制御部が、前記第2センサ部により得られた画像データに基づいて前記後続搬送装置のずり積載状況を認識することができる。
本発明の一態様によれば、前記通信部を通して前記後続搬送装置から前記所定量のずりが積み込まれたことを示す積込み終了通知を受信すると、前記プロセッサ部が前記ずり掻き込み機構および前記積込み機構を停止することができる。
上述の目的を達成するため、本発明は、切羽と坑口との間に前記切羽から前記坑口へ向けて少なくともホイールローダ、ずり積込み機および後続搬送装置を配置し、前記切羽前のずりを少なくとも前記ホイールローダ、前記ずり積込み機および前記後続搬送装置を通して坑口へ搬送するトンネル工事におけるずり搬出システムであって、前記ホイールローダが、ずり積載部と、3次元データを出力する3次元スキャナ、可視光画像データを出力する可視光カメラ、および赤外線画像データを出力するサーマルカメラを含む第1センサ部と、少なくとも前記ずり積込み機と通信可能な第1通信部と、前記第1センサ部の出力に基づいて、前記ホイールローダの走行および前記ずり積載部の駆動を制御する第1自動運転制御部と、を有し、前記第1自動運転制御部が、a)前記第1センサ部により得られる3次元データ、、可視光画像データおよび赤外線画像データに基づいて前記切羽での発破完了および前記切羽前のずり領域を認識し、b)発破完了を認識すると、認識された前記切羽前のずりを前記ずり積載部に積載し、前記ずり積込み機から前記切羽側にある所定地点へ移動し、前記ずり積載部に積載されたずりを前記所定地点へ投入し、c)所定量のずりを前記所定地点へ投入すると、前記ずり積込み機へ投入終了通知を送信し、前記ずり積込み機が、前記所定地点に前記ホイールローダにより積載されたずりを掻き込むずり掻き込み機構と、前記刷り掻き込み機能により掻き込まれたずりを前記後続搬送装置へ積み込む積込み機構と、3次元データを出力する3次元スキャナ、可視光画像データを出力する可視光カメラ、および赤外線画像データを出力するサーマルカメラを含む第2センサ部と、前記ホイールローダおよび前記後続搬送装置と通信可能な第2通信部と、前記第2センサ部の出力に基づいて、前記ずり掻き込み機構および前記積込み機構を制御する第2自動運転制御部と、を有し、前記第2自動運転制御部が、d)前記第2センサ部により得られる3次元データ、可視光画像データおよび赤外線画像データに基づいて前記所定地点のずり領域を認識し、e)前記ずり掻き込み機構および前記積込み機構を駆動し、前記所定地点のずりを掻き込んで前記後続搬送装置へ積み込み、f)前記後続搬送装置に所定量のずりが積み込まれることで前記ずり掻き込み機構および前記積込み機構を停止する、ことを特徴とする。
【発明の効果】
【0009】
本発明によれば、ホイールローダからずり積載終了通知を受信すると、画像認識により所定地点のずり領域を認識して、ずり掻き込み機構および積込み機構を駆動してずりを後続搬送装置へ積み込み、後続搬送装置に所定量のずりが積み込まれることでずり掻き込み機構および積込み機構を停止する。これにより、ずり搬出待ちによるサイクルロスを抑制してトンネル工事の施工期間の短縮化を達成できる。また、掘削ズリ積込み作業時の省力化・省人化を可能とするともに,発破後の切羽ズリを迅速に処理することで切羽作業エリアを早期解放し、トンネル掘削サイクルの円滑化を達成できる。
本発明の一態様によれば、自動運転制御部が画像認識により後続搬送装置のずり積載状況を認識するので、ずり積込み機だけでずり積込み作業の起動および停止の自動化が可能となる。
本発明の一態様によれば、後続搬送装置からの積込み終了通知を受信することでずり積込み作業の起動および停止の自動化が可能となる。自動運転制御部がずり積載状況を認識する必要がないので、自動運転制御部の負荷を軽減できる。
本発明の一態様によれば、3次元スキャナによりずり積込み機の走行が可能となり、所定地点のずりをより効率的に掻き込むことができ、さらにトンネル工事の進展と共に移動するずり仮置き場に容易に追従できる。
本発明の一態様によれば、自動運転制御部が画像認識により積込み機構のずり積載状況を認識するので、ずり積込み機だけでずり積込み作業の起動および停止の自動化が可能となる。
本発明の一態様によれば、前記積込み機構のずり積載状況に応じて前記ずり掻き込み機構および前記積込み機構の動作速度を調整することができるので、ずりの搬出をより効率化できる。
本発明によれば、ホイールローダ、ずり積込み機およびずり運搬車が無線通信しながらそれぞれの作業を実行するので、切羽前のずりをクラッシャまで効率的に自動搬出することが可能となる。
【図面の簡単な説明】
【0010】
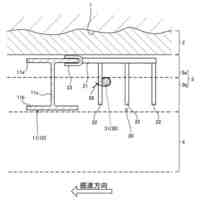
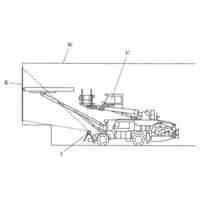
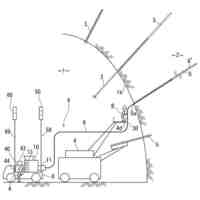
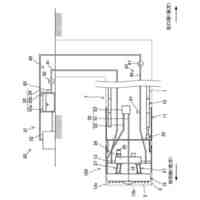
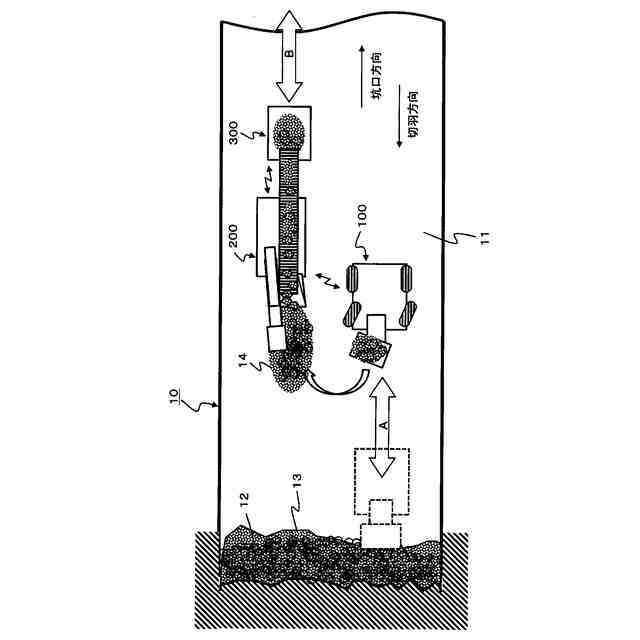
本発明の一実施形態によるずり積込み機を用いたずり搬送システムの動作を説明するための模式的なトンネル縦断面側面図である。
図1に例示するずり搬送システムの動作を説明するための模式的なトンネル縦断面平面図である。
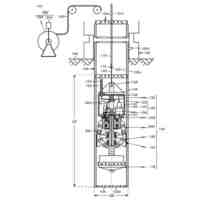
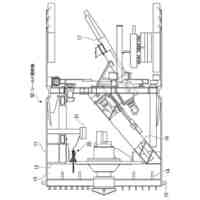
図1に例示するずり搬送システムにおけるホイールローダの構成を示す模式的側面図である。
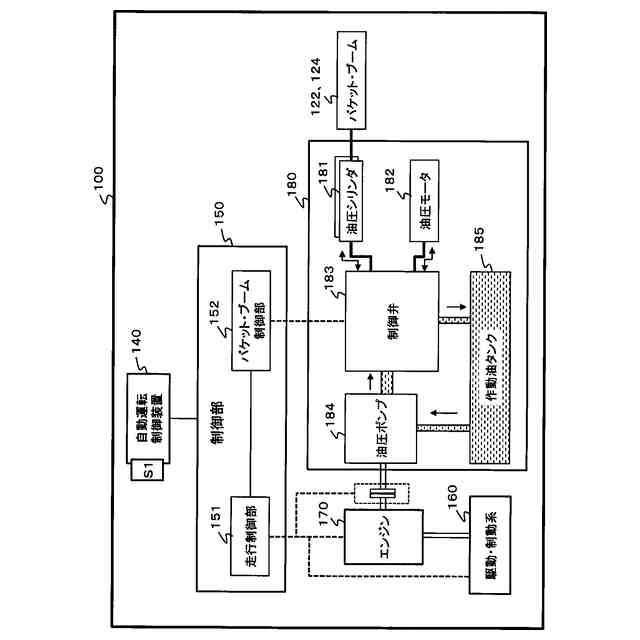
図1に例示するずり搬送システムにおけるホイールローダの機能的構成を示す模式的ブロック図である。
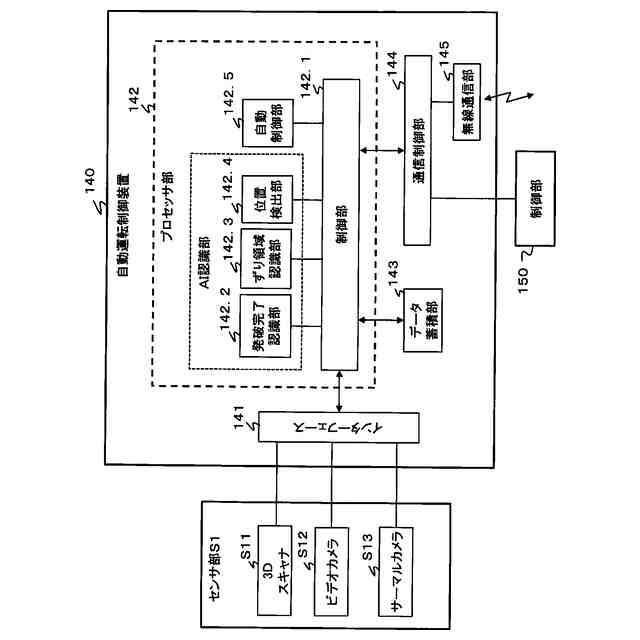
図1に例示するずり搬送システムにおけるホイールローダの自動運転制御装置の構成を示すブロック図である。
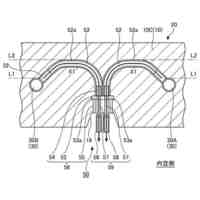
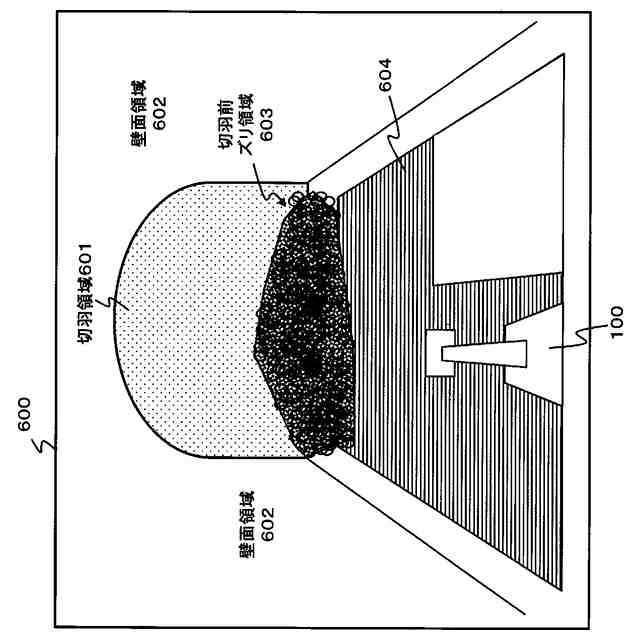
図1に例示するずり搬送システムにおけるホイールローダの自動運転制御装置により認識された切羽前の画像の一例を示す模式図である。
本図1に例示するずり搬送システムにおけるホイールローダの自動運転制御装置の動作を示すフローチャートである。
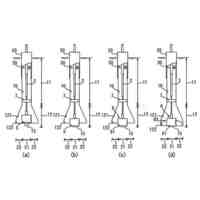
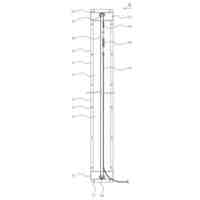
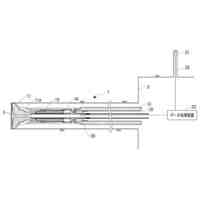
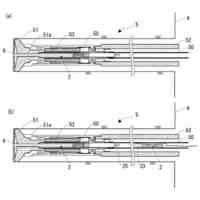
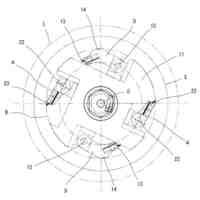
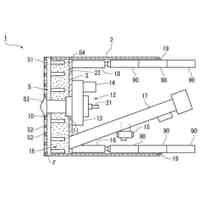
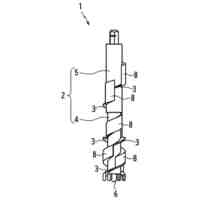
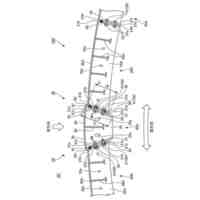
本実施形態によるずり積込み機の側面構成図である。
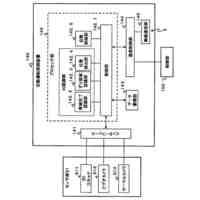
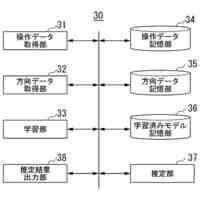
本実施形態によるずり積込み機の機能的構成を示す模式的ブロック図である。
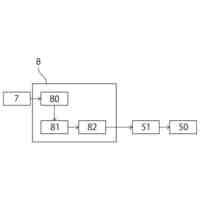
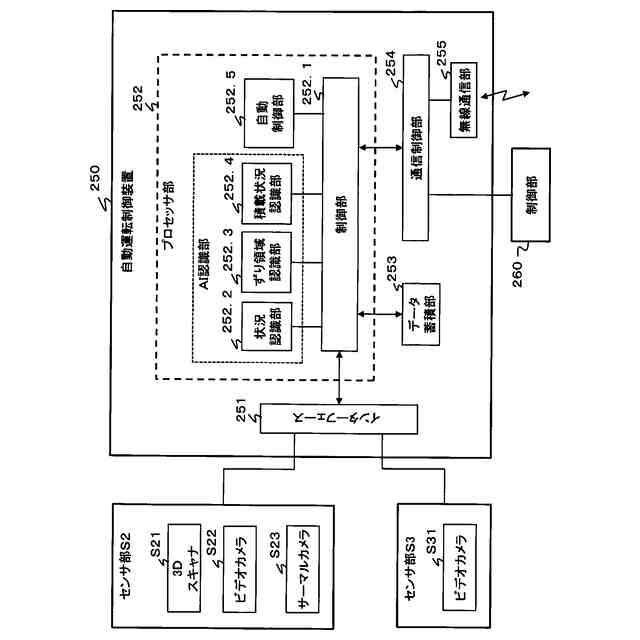
本実施形態によるずり積込み機の自動運転制御装置の構成を示すブロック図である。
本実施形態によるずり積込み機の自動運転制御装置により認識された前方画像の一例を示す模式図である。
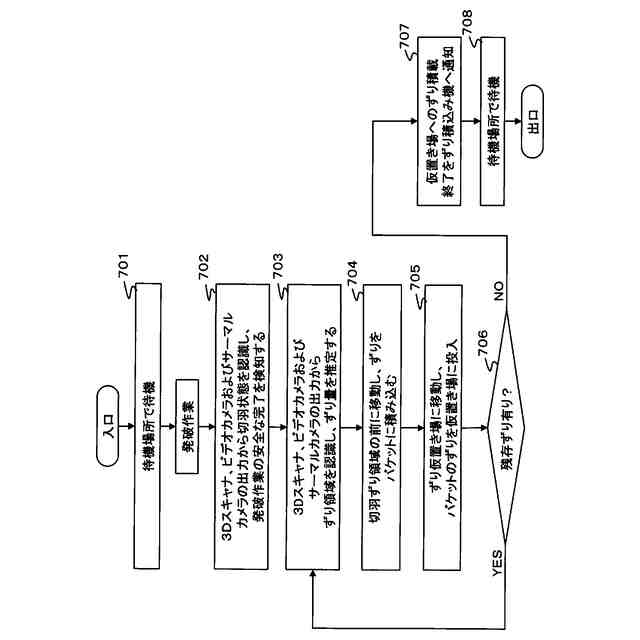
本実施形態によるずり積込み機の自動運転制御装置の動作を示すフローチャートである。
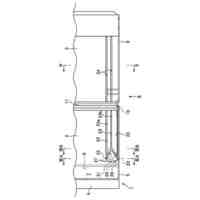
図1に示すずり搬送システムにおけるずり運搬車の側面図である。
(A)は図13における矢印I方向から見たずり運搬車の正面図であり、(B)は同じくずり運搬車のII-II断面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社エステック
掘削機及び掘削装置
2か月前
株式会社ケー・エフ・シー
防水シート探傷装置
4日前
株式会社奥村組
電力線通信設備を用いた推進方法
25日前
鹿島建設株式会社
掘削方法
1か月前
ニシオティーアンドエム株式会社
トンネル工事用作業装置
1か月前
システム計測株式会社
ケリーバ保持治具
2か月前
鹿島建設株式会社
線状体敷設方法
1か月前
株式会社大林組
安定液管理方法及び安定液管理装置
4日前
株式会社Lavie
土木作業装置
1か月前
岐阜工業株式会社
トンネルインバートの排水管の設置方法
7日前
大成建設株式会社
シールドトンネルとその施工方法
1か月前
三重重工業株式会社
耐寒用導水樋
1か月前
株式会社安藤・間
移動式架台
2か月前
株式会社大林組
切羽前方探査方法
1か月前
清水建設株式会社
泥土評価システム、泥土評価方法
1か月前
株式会社ケー・エフ・シー
トンネル掘削方法
5日前
株式会社大林組
岩石コア採取システム
1か月前
日本コンクリート工業株式会社
掘削装置
8日前
大豊建設株式会社
テールクリアランス計測装置
2か月前
清水建設株式会社
制御装置、制御方法、およびプログラム
2か月前
大成建設株式会社
中折れシールド掘削機
2か月前
佐藤工業株式会社
山岳トンネルの切羽監視方法及び監視システム
2か月前
株式会社サン・エンジニア
スクリューオーガ
1か月前
株式会社横河NSエンジニアリング
鋼製セグメントのセグメント継手
2か月前
中国電力株式会社
情報処理装置及び情報処理方法
1か月前
中交第二公路工程局有限公司
TBM主駆動可視化潤滑装置及びその使用方法
1か月前
株式会社フジタ
ずり搬出システムにおけるホイールローダおよびその自動運転方法
1か月前
戸田建設株式会社
トンネル掘削機システム
1か月前
戸田建設株式会社
トンネル掘削機システム
1か月前
フジモリ産業株式会社
ロックボルト工の充填材注入システム
1か月前
株式会社ジオテック
インナーロッド、及びボーリングロッド、並びに二重管削孔方法
4日前
鹿島建設株式会社
泥水式トンネル掘削機及びトンネル掘削方法
1か月前
清水建設株式会社
推定装置、学習装置、推定方法、学習方法、及びプログラム
2か月前
株式会社タック
土砂搬出システム、及び土砂搬出方法
1か月前
大成建設株式会社
カッタビットの製造方法
22日前
大成建設株式会社
セグメントの接合構造と接合方法、及びセグメントの長孔隙間閉塞用座金
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ